实验十九 舵机的控制原理#

🌟 项目简介#
舵机(Servo Motor)是一种能精确控制转动角度的小型智能电机,常用于机器人、机械臂、智能小车等项目中。它不像普通电机那样只能“转”或“停”,而是可以“停在某个特定角度”,比如:0°、45°、90°、135°、180°……就像你的手臂能停在任意一个姿势一样!
我们用的这款舵机标称是90°舵机,但实际可稳定控制在接近180°范围内,非常适合初学者动手实践。
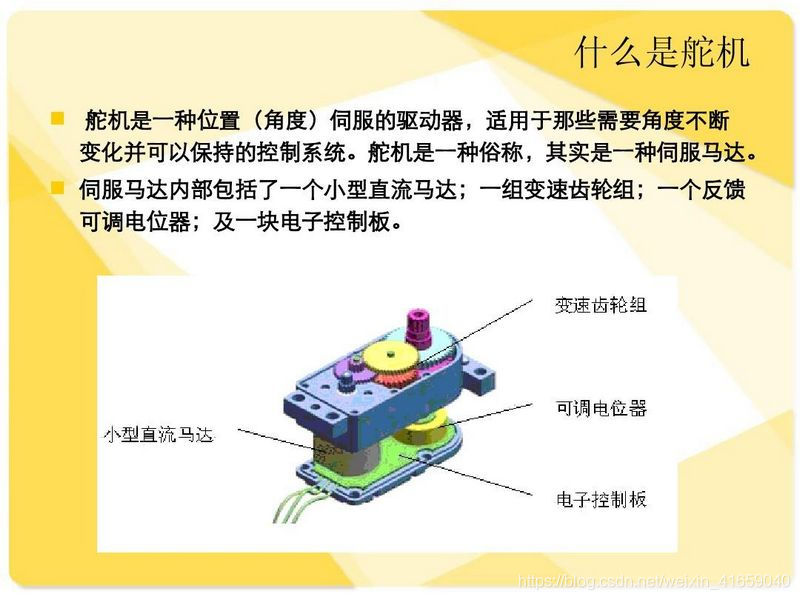
⚙️ 工作原理#
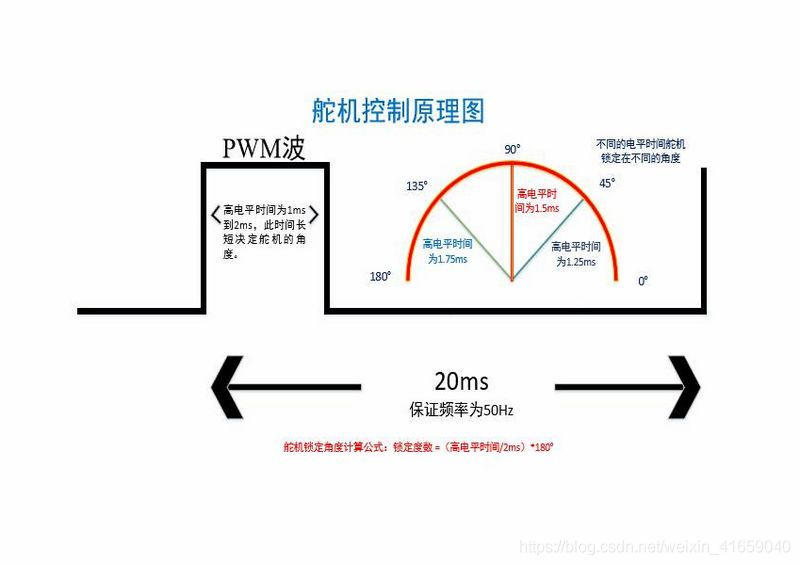
舵机内部有马达、齿轮组和角度传感器(电位器),它通过接收PWM(脉冲宽度调制)信号来判断该转到哪个角度:
✅ 标准信号周期 = 20ms(即频率 = 50Hz)
✅ 脉冲宽度(高电平持续时间)决定角度:
0.5ms→ 约 0°1.5ms→ 约 90°(中位)2.5ms→ 约 180°
💡 小知识:Pi Pico 的 PWM 输出范围是 0–65535(16位),所以 1.5ms 对应约
7.5% × 65535 ≈ 4915,这就是为什么代码里常用4915表示90°!
舵机分为多种类型:
🔹 180°舵机:最常用,角度范围约 0°~180°(本课使用)
🔹 360°连续旋转舵机:没有角度限制,像普通电机一样可正反转(需特殊信号)
🔹 90°舵机:物理限位更小,但本款实测支持近180°,放心使用!
🧰 所需材料#
|
|
|
|
|---|---|---|---|
Raspberry Pi Pico 主控板 ×1 |
KS3017 Pico 扩展板 ×1(带面包板,方便接线) |
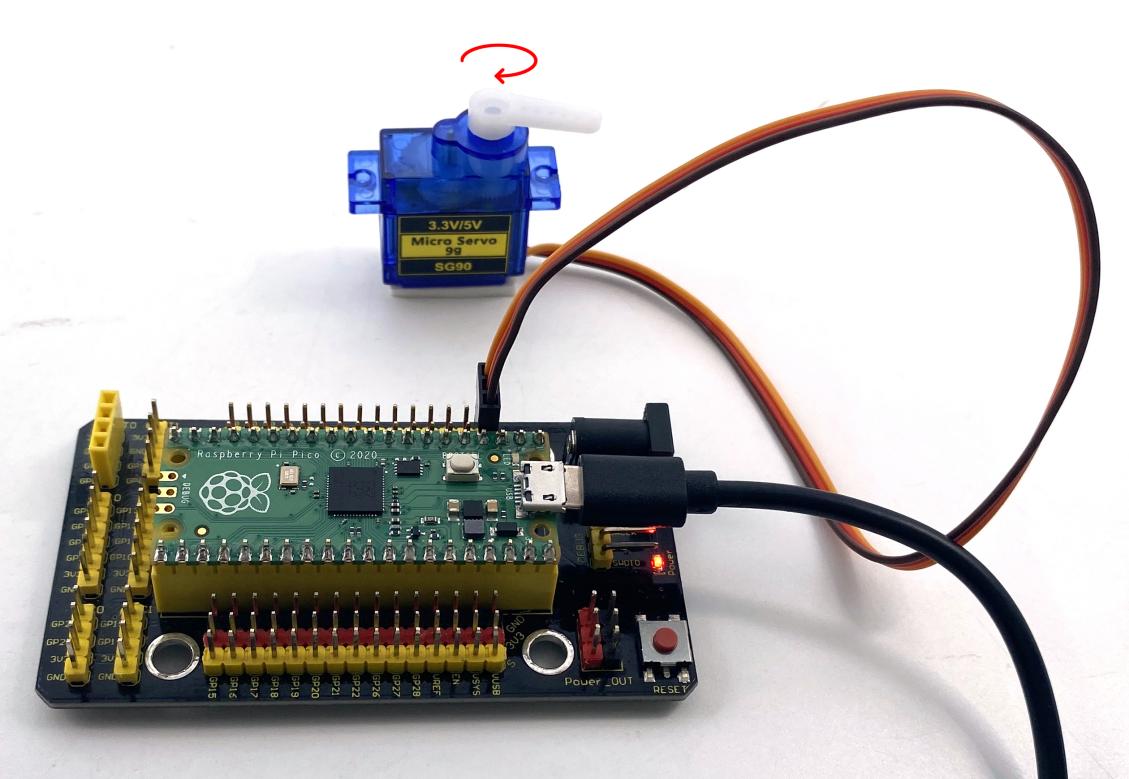
SG90 或类似微型伺服舵机 ×1 |
Micro USB 数据线 ×1(用于供电与编程) |

✅ 提示:舵机三根线颜色可能略有不同,请认准功能——
🔹 棕色(或黑色)→ GND(接地)
🔹 红色(或橙色)→ VCC(5V电源)
🔹 黄色(或白色/橙色)→ Signal(信号线,接Pico GPIO)
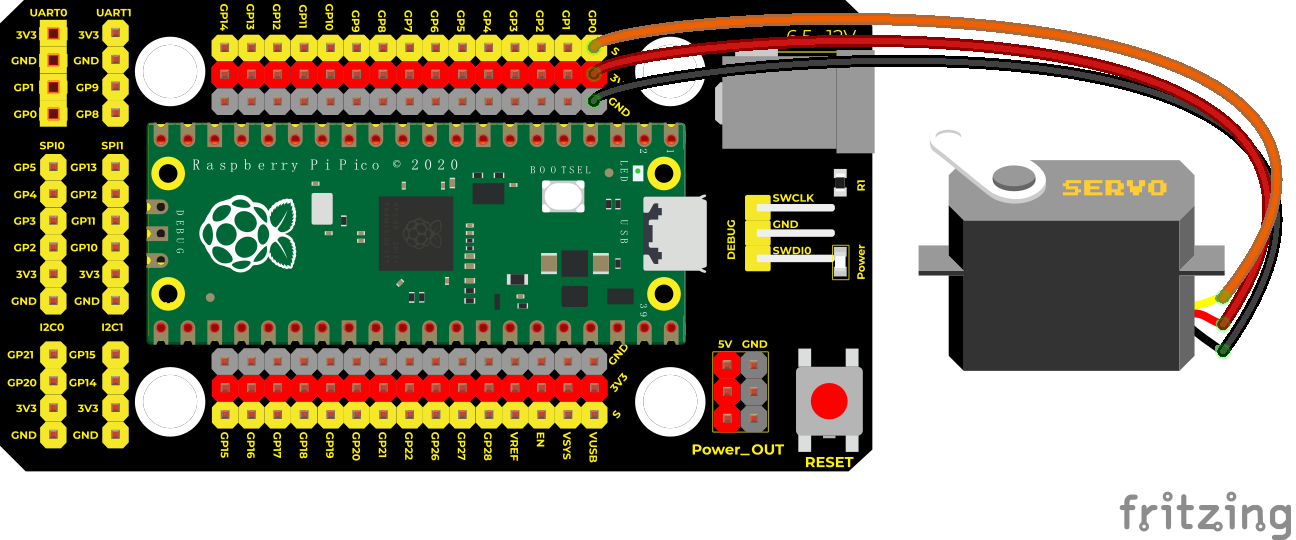
🔌 接线说明#
舵机引脚 |
连接到 |
说明 |
|---|---|---|
棕色(GND) |
Pico GND 引脚 |
可接扩展板任意黑色GND孔 |
红色(VCC) |
扩展板 5V 输出口 |
⚠️ 务必接 5V!Pico 的3.3V无法驱动舵机 |
黄色(Signal) |
Pico GP0(引脚1) |
本课使用 GPIO 0 控制舵机 |
✅ 安全提醒:
舵机启动瞬间电流较大,不建议直接用Pico的3.3V或USB口供电;
使用扩展板的 5V稳压输出(由USB供电经稳压芯片提供),更安全可靠;
若舵机抖动/无力/发热,请立即断电检查接线是否正确!
💻 示例代码(MicroPython)#
▶️ 代码1:三点定位演示(0° → 90° → 180° 循环)#
# Keyes Starter Kit for Raspberry Pi Pico
# 实验19.1:舵机三点角度演示
from machine import Pin, PWM
import time
# 初始化PWM引脚(GP0)
pwm = PWM(Pin(0))
pwm.freq(50) # 设置频率为50Hz(周期20ms)
# 预设角度对应的占空比值(16位精度:0~65535)
angle_0 = 1638 # 约0°(0.5ms)
angle_90 = 4915 # 约90°(1.5ms)
angle_180 = 8192 # 约180°(2.5ms)
while True:
pwm.duty_u16(angle_0)
time.sleep(1)
pwm.duty_u16(angle_90)
time.sleep(1)
pwm.duty_u16(angle_180)
time.sleep(1)
▶️ 代码2:平滑扫描演示(0° ↔ 180° 连续转动)#
# Keyes Starter Kit for Raspberry Pi Pico
# 实验19.2:舵机角度平滑扫描
from utime import sleep
from machine import Pin, PWM
# 初始化PWM(GP0)
pwm = PWM(Pin(0))
pwm.freq(50) # 20ms周期,50Hz
# 将角度0~180映射为占空比1000~9000(留出余量,避免超限抖动)
def convert(x, i_min, i_max, o_min, o_max):
# x:输入角度;i_min/i_max:角度范围;o_min/o_max:占空比范围
return max(o_min, min(o_max, (x - i_min) * (o_max - o_min) // (i_max - i_min) + o_min))
def set_angle(degree):
pos = convert(degree, 0, 180, 1000, 9000)
pwm.duty_u16(pos)
sleep(0.01) # 给舵机一点响应时间
while True:
# 从0°慢慢转到180°
for d in range(0, 181, 1):
set_angle(d)
sleep(0.01) # 每步延时10ms,总耗时约1.8秒
# 从180°慢慢转回0°
for d in range(180, -1, -1):
set_angle(d)
sleep(0.01)
📝 代码解析#
✅ 为什么用 duty_u16()?
Pi Pico 的 PWM 占空比用 16 位整数表示(0 ~ 65535),duty_u16(4915) 表示高电平占整个周期的 4915 / 65535 ≈ 7.5%,对应 1.5ms 脉宽 → 90°。
✅ 为什么映射范围是 1000~9000?
不同品牌舵机存在个体差异,直接用理论值(1638~8192)可能导致卡顿或超限。扩大为 1000~9000 更稳妥,兼顾起始与极限位置。
✅ convert() 函数的作用?
这是一个「比例换算器」:把角度(0~180)自动变成合适的占空比(1000~9000),不用手动查表,让代码更清晰、更易修改!
🌈 实验现象#
✅ 运行代码1后:舵机会清晰地在三个位置之间切换——
➡️ 先停在最左边(0°)→ 等1秒 → 转到中间(90°)→ 等1秒 → 转到最右边(180°)→ 等1秒 → 循环
✅ 运行代码2后:舵机会像钟摆一样,匀速、安静、平稳地从左扫到右,再从右扫回左,全程无抖动、无停顿,非常直观地展现“角度可控”的魅力!
⚠️ 注意事项(请务必阅读!)#
接线别反!
🔌 棕(GND)、红(5V)、黄(Signal)顺序不能错;接反可能烧毁舵机或Pico!首次上电先测试角度范围
建议先运行代码1,观察舵机是否真的能转到两端。若某端卡住,微调angle_0或angle_180的数值(如改为 1200 / 8500)。避免长时间堵转
如果舵机被外力强行卡住还持续发信号,会发热甚至烧坏。实验中请勿用手硬掰舵机臂!信号线远离干扰源
尽量让舵机信号线(黄色)远离电机、USB线等大电流线路,减少误动作。
🧠 扩展思维#
在本课舵机平滑扫描的基础上,如果想让舵机按音乐节奏左右摆动(比如检测声音强度后转动),你觉得第一步该做什么?