实验十六 摇杆模块#

🌟 项目简介#
你有没有玩过游戏手柄?手柄上的小摇杆轻轻一推,角色就能前后左右移动——它其实是一个“会说话的方向传感器”!本节课,我们将用 Keyes DIY 电子积木摇杆模块,让 Raspberry Pi Pico 听懂摇杆的语言:它往哪边推?有没有按下中间的按钮?通过读取 X 轴、Y 轴的模拟值和按钮(Z 轴)的开关状态,我们就能完整掌握摇杆的每一个动作!
⚙️ 工作原理#
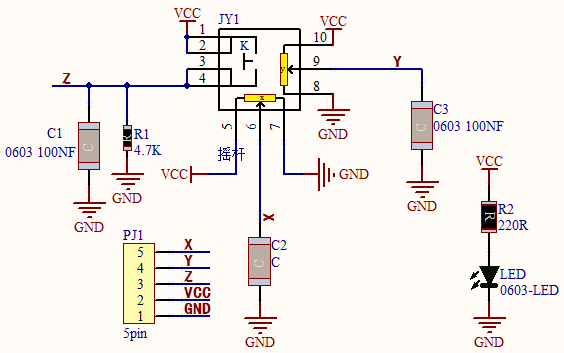
摇杆模块内部藏着“两个可调电阻(电位器)+ 一个轻触开关”:
X轴电位器:左右摇动时,输出 0–65535 的电压值(对应 MicroPython 的
read_u16());Y轴电位器:上下摇动时,同样输出 0–65535 的电压值;
Z轴按钮(B引脚):默认未按下时为 低电平(0),按下后接通 VCC 变为 高电平(1) ——注意:这和普通按键模块逻辑相反哦!
✅ 小知识:Pico 的 ADC 引脚(如 GP26、GP27)能将模拟电压“翻译”成数字,范围是 0(0V)到 65535(3.3V),非常灵敏!
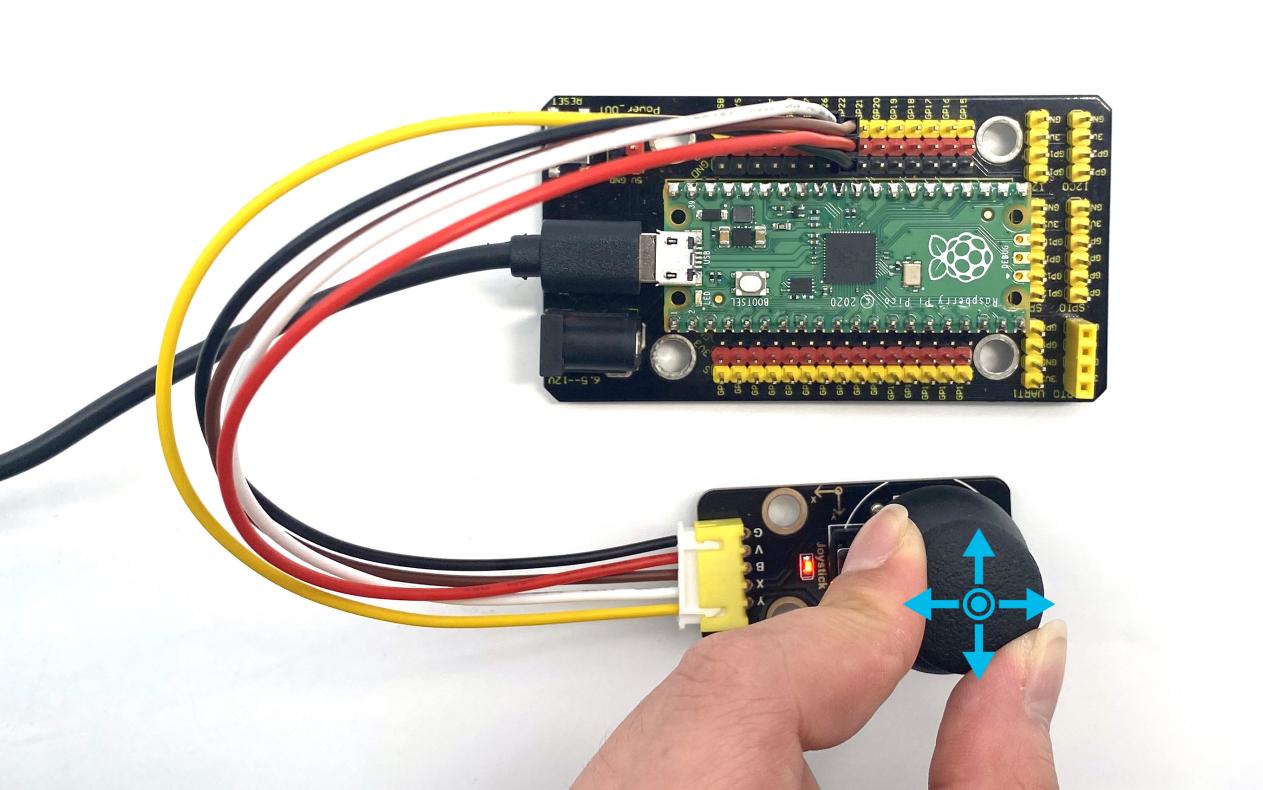
🧰 所需材料#
|
|
|
|
|
|---|---|---|---|---|
Raspberry Pi Pico 板 ×1 |
Raspberry Pi Pico 扩展板 ×1 |
Keyes DIY 电子积木 摇杆模块 ×1 |
防反插 5Pin 杜邦线(母对母)×5 |
MicroUSB 数据线 ×1 |

🔌 接线图#
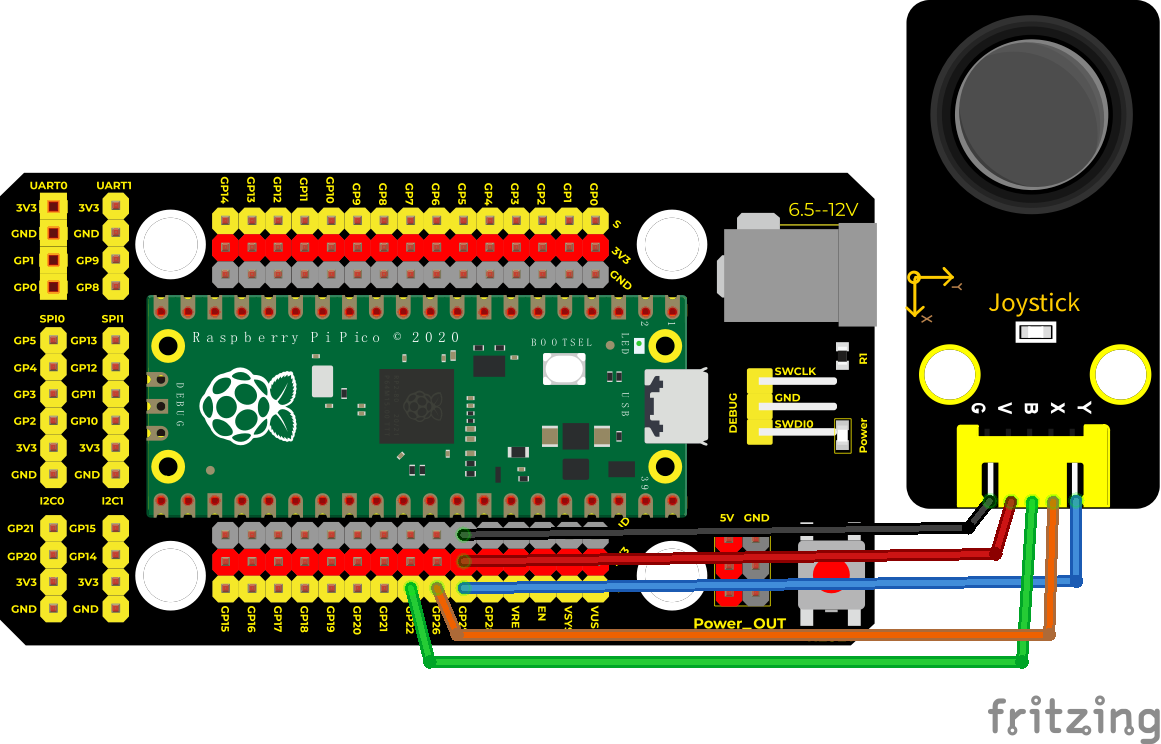
✅ 正确接线方式(请严格对照图连接):
摇杆模块引脚 |
连接到 Pico 引脚 |
说明 |
|---|---|---|
VCC |
VSYS 或 3.3V |
供电(推荐 VSYS,更稳定) |
GND |
GND |
共地 |
X |
GP26(ADC0) |
X 轴模拟信号 |
Y |
GP27(ADC1) |
Y 轴模拟信号 |
B(Z) |
GP22 |
按钮数字信号(输入) |
⚠️ 注意:摇杆模块的 B 引脚是“按下变高”,所以代码中直接读
.value()即可,无需加Pull.UP或Pull.DOWN。
💻 示例代码(MicroPython)#
# Keyes Starter Kit for Raspberry Pi Pico
# 实验16:摇杆模块
# 作者:创客教育团队
import machine
import utime
# 初始化引脚
button = machine.Pin(22, machine.Pin.IN) # B引脚 → GP22,数字输入
x_axis = machine.ADC(26) # X引脚 → GP26,模拟输入
y_axis = machine.ADC(27) # Y引脚 → GP27,模拟输入
print("摇杆模块已启动!")
print("提示:摇动方向查看X/Y值变化,按下按钮看B值变为1")
while True:
b_val = button.value() # 读取按钮状态:0=未按,1=按下
x_val = x_axis.read_u16() # 读取X轴值(0~65535)
y_val = y_axis.read_u16() # 读取Y轴值(0~65535)
# 一行显示所有数据,便于观察
print(f"按钮:{b_val} X:{x_val} Y:{y_val}")
utime.sleep(0.1) # 每0.1秒刷新一次,避免刷屏太快
📝 代码解析#
代码行 |
说明 |
|---|---|
|
将 GP22 设置为数字输入模式,用于检测按钮是否按下 |
|
将 GP26 设置为模拟输入,读取 X 方向电压 |
|
返回 0–65535 的整数(不是 0–1023!Pico ADC 是 16 位) |
|
使用 f 字符串让打印更清晰易读(比 |
|
暂停 0.1 秒,防止串口输出太快看不清,也减轻 CPU 负担 |
💡 小技巧:静止时 X/Y 值通常在 32000–33000 左右(中点电压约 1.65V),向左推 X 变小,向右推 X 变大;向上推 Y 变小,向下推 Y 变大。
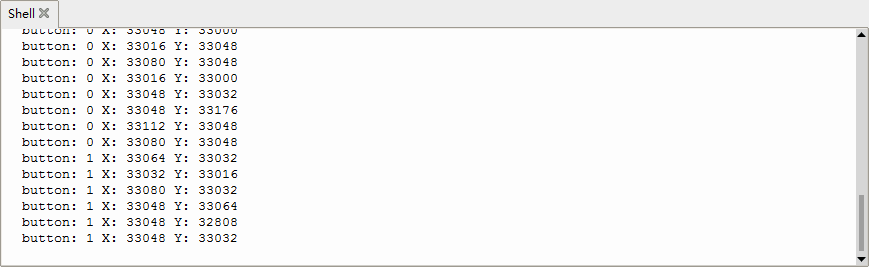
🌈 实验现象#
运行代码后,打开 Thonny 的 Shell(或串口监视器),你会看到类似这样的实时输出:
摇杆模块已启动!
提示:摇动方向查看X/Y值变化,按下按钮看B值变为1
按钮:0 X:32450 Y:32780
按钮:0 X:32448 Y:32782
按钮:1 X:32455 Y:32778 ← 此时按下了摇杆按钮!
按钮:0 X:18230 Y:32790 ← 向左推,X 值明显变小
按钮:0 X:32460 Y:8920 ← 向下推,Y 值明显变小
✅ 成功标志:
摇杆静止时 X/Y 值稳定在中间范围(≈32000–33000);
左/右/上/下推动时,对应数值明显增大或减小;
按下按钮时,“按钮:” 后面的数字从
0瞬间变成1。
⚠️ 注意事项#
🔌 电源选择:摇杆模块支持 3.3V–5V,但 Pico 的 3.3V 引脚带载能力较弱,强烈建议接 VSYS 引脚(即 USB 供电直出),避免模块工作异常;
🧩 防反插线材:使用防反插 5Pin 杜邦线时,请确认颜色对应(红-VCC、黑-GND、绿-X、蓝-Y、黄-B),避免接错烧毁模块;
🧹 接触不良排查:若数值跳变剧烈或始终为 0/65535,请检查杜邦线是否插紧、焊点是否虚焊、模块引脚有无氧化;
🐍 代码上传后需重启:部分情况下需点击 Thonny 的「Stop/Restart backend」按钮,再运行,确保新代码生效。
🧠 扩展思维#
在本课摇杆实时数据显示的基础上,如果想让 Pico 根据摇杆方向控制一个 LED 的亮灭(比如:向上推灯亮,向下推灯灭),该怎样修改代码?