3. 坦克机器人安装#
安装1
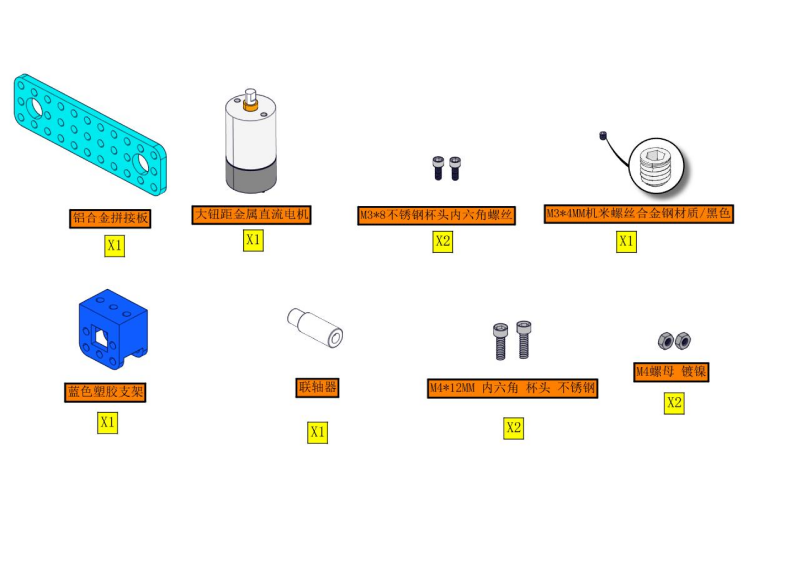
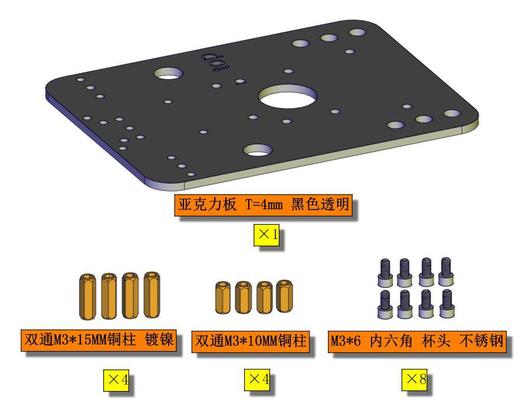
安装所需零件
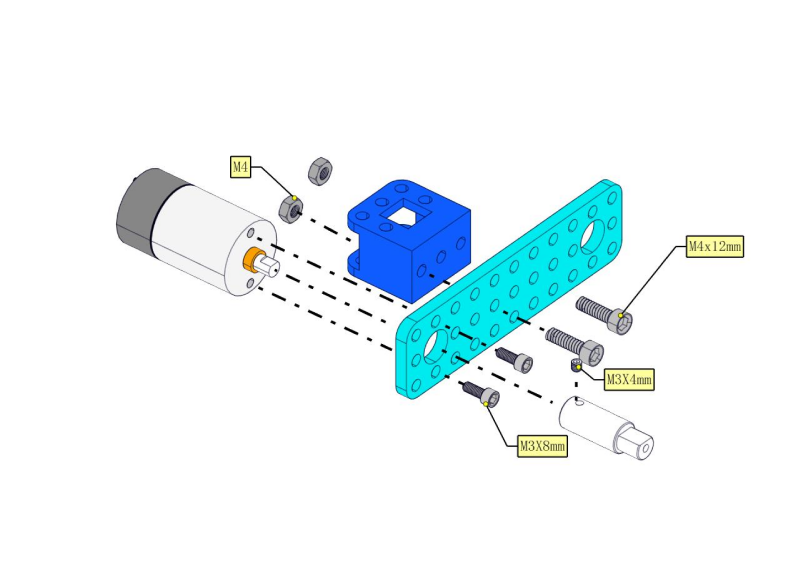
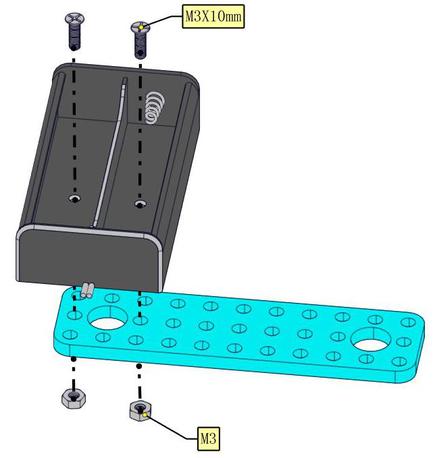
安装
完成
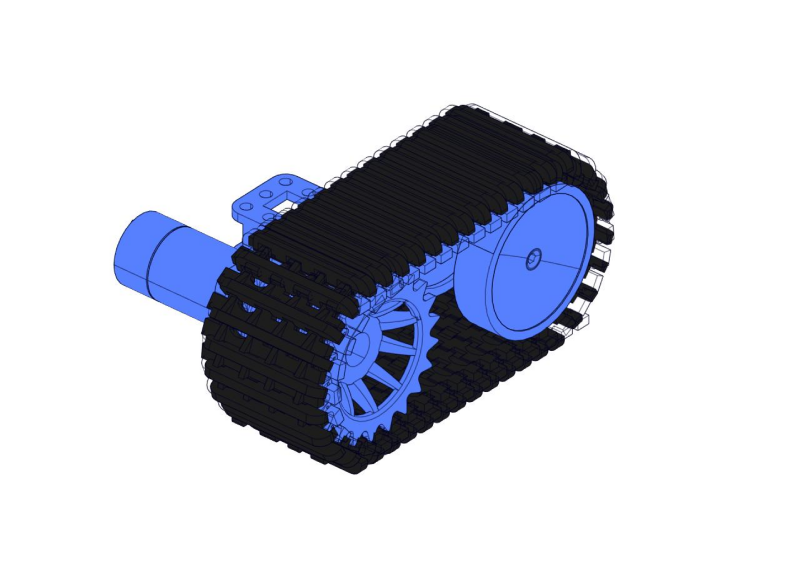
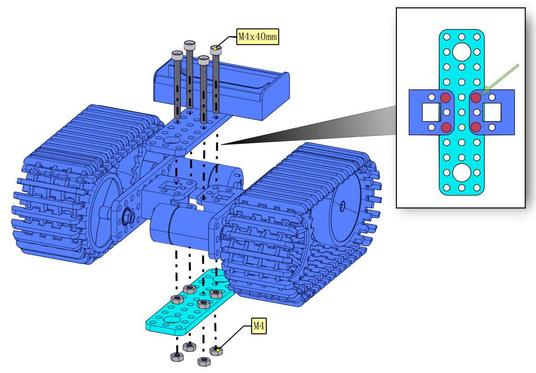
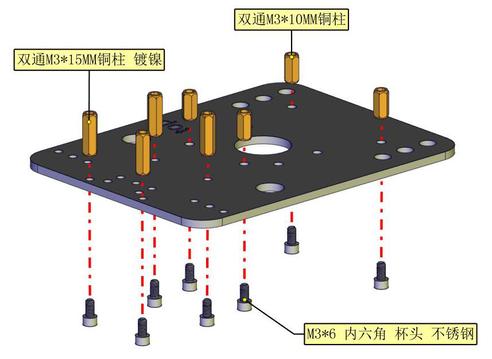
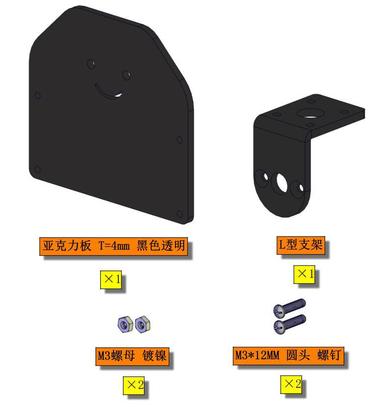
安装2
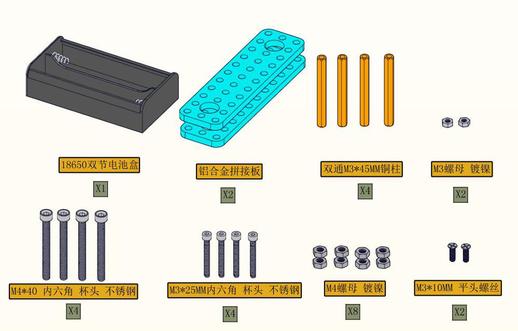
安装所需零件
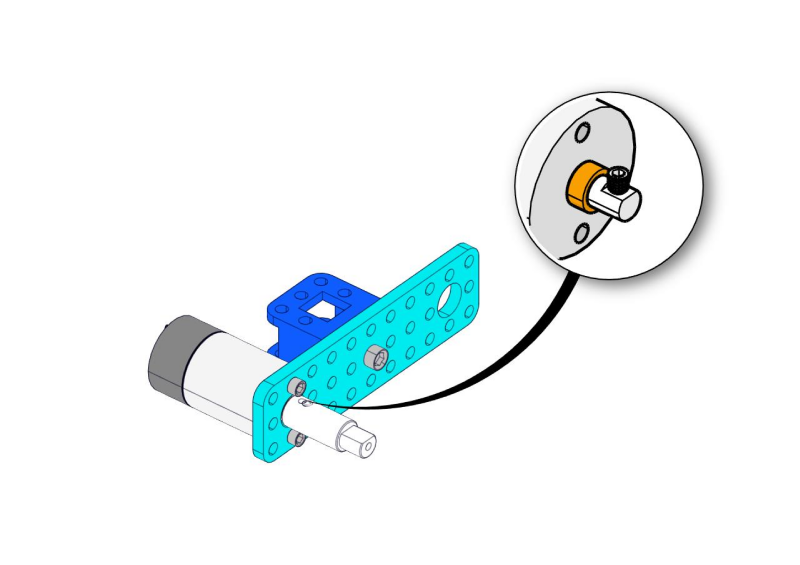
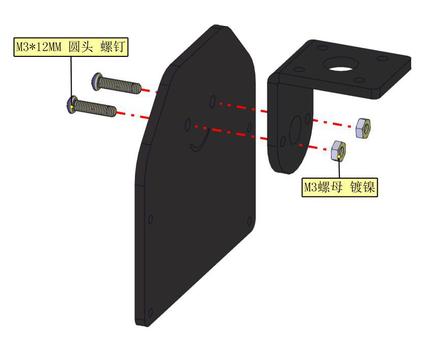
分步安装1
分步安装2
分步安装3
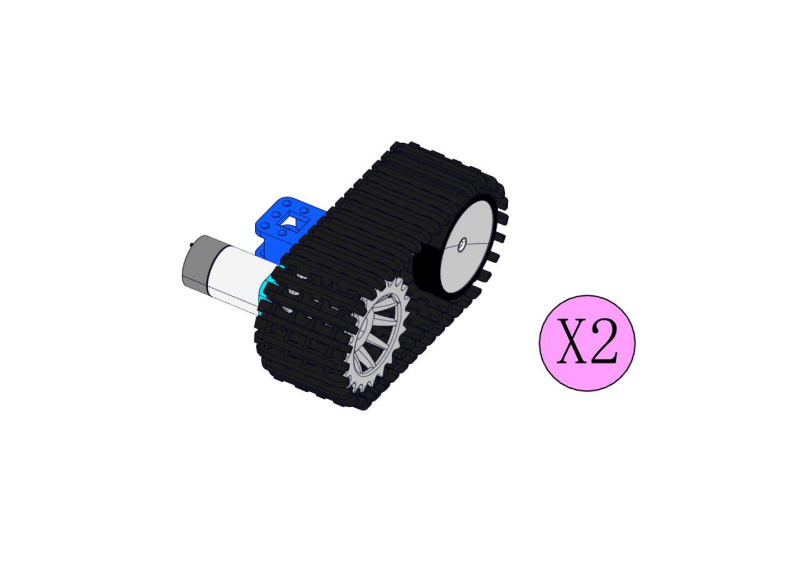
完成(注意需按以上步骤再做一组)
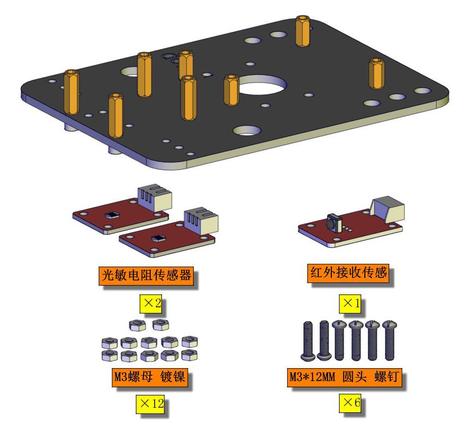
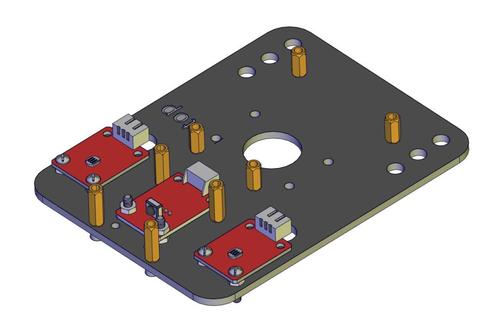
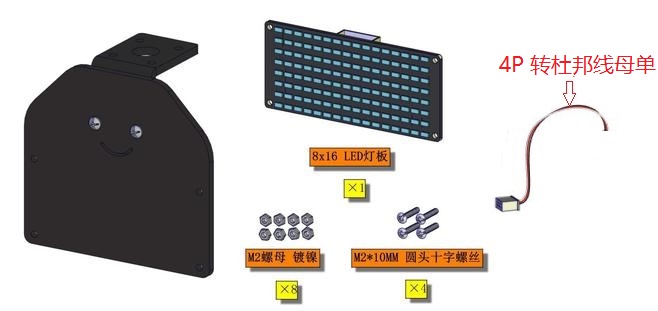
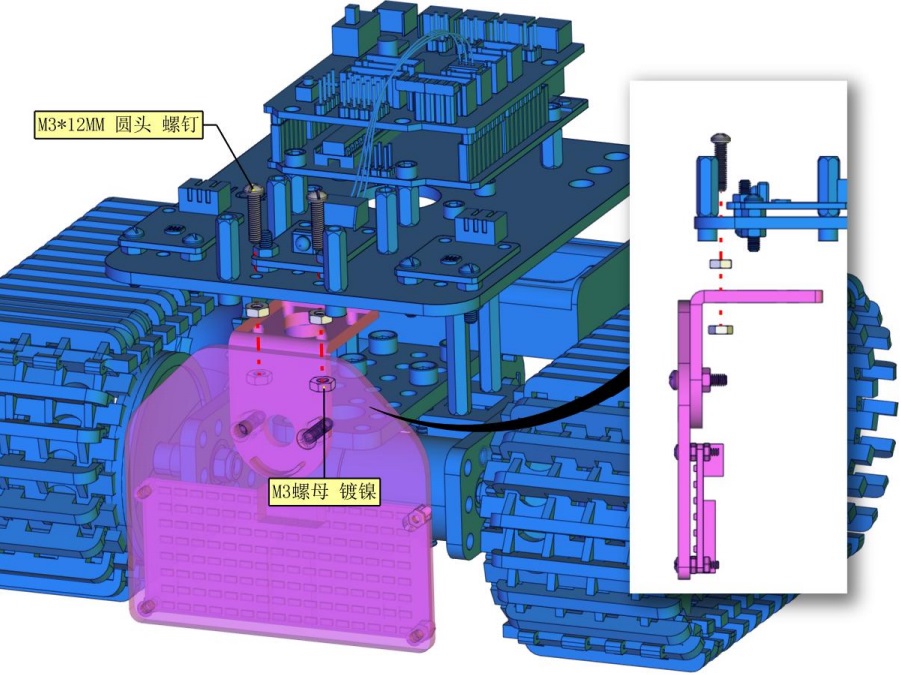
安装3
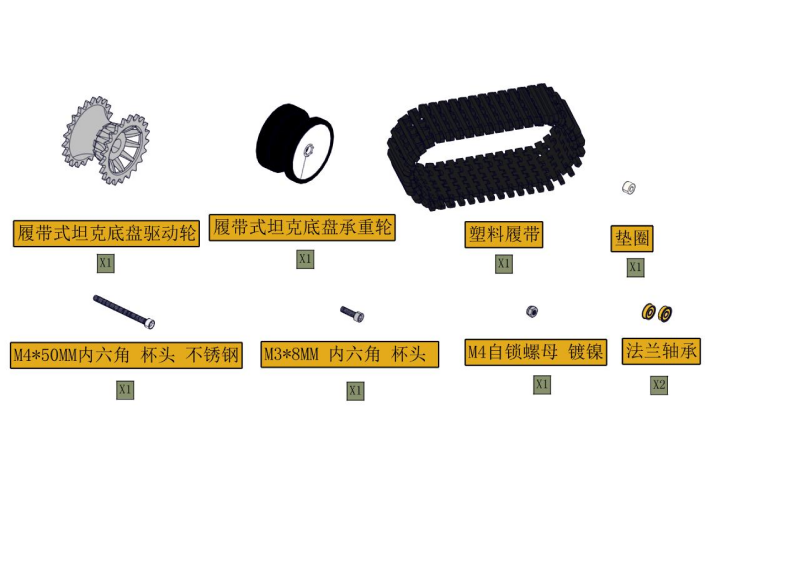
安装所需零件
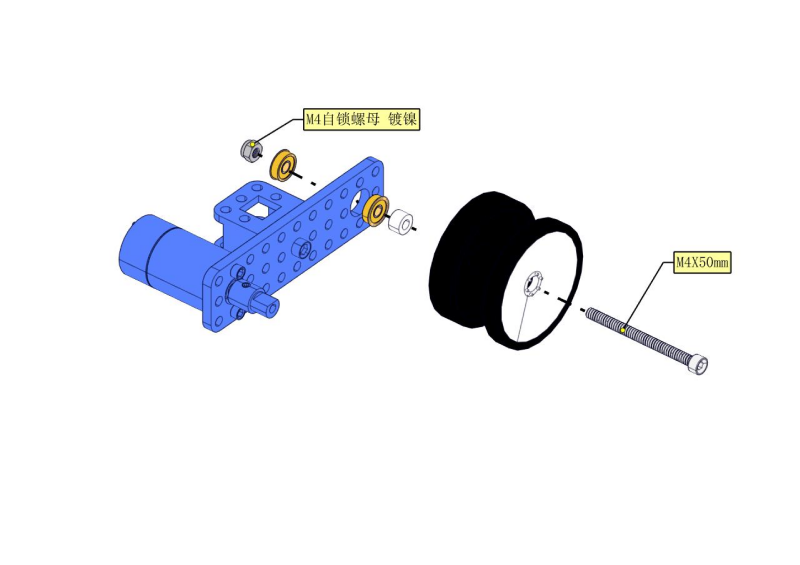
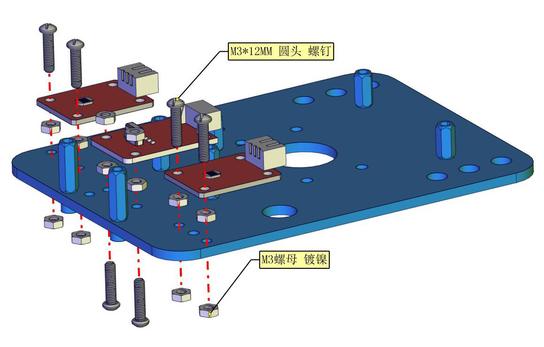
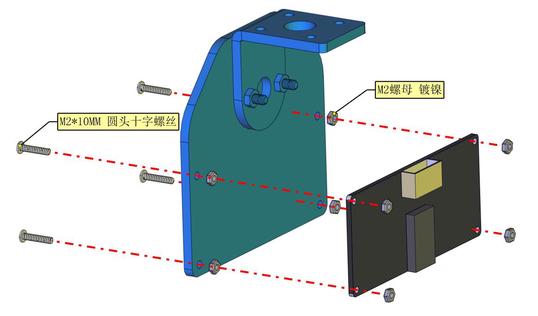
分步安装1
分步安装2
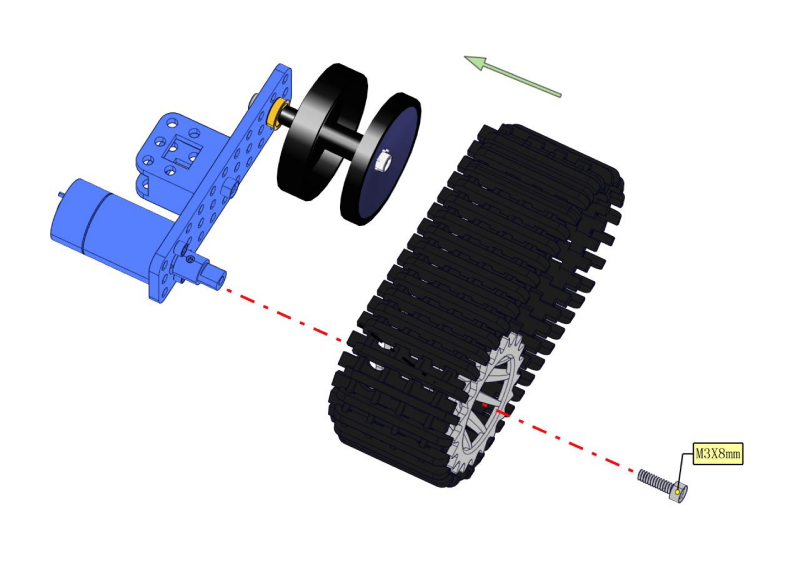
分步安装3
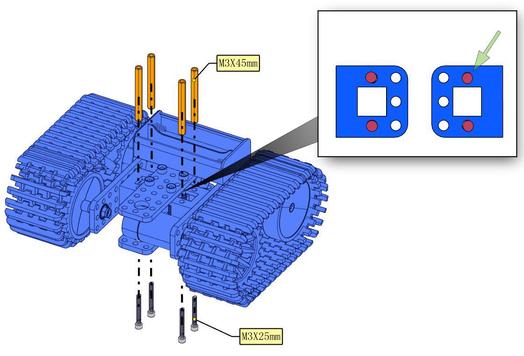
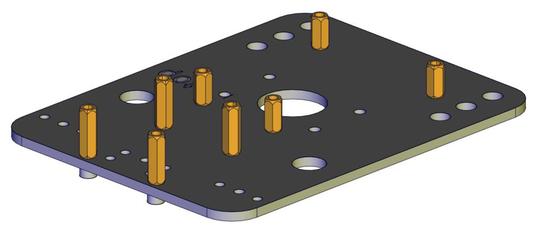
完成
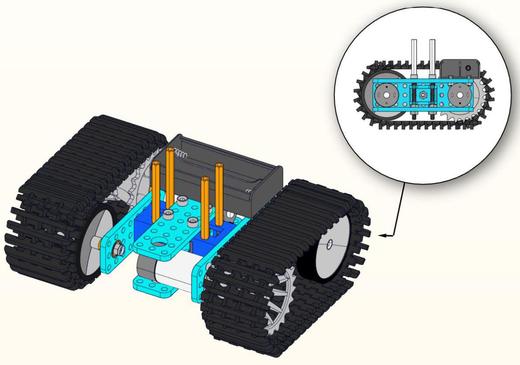
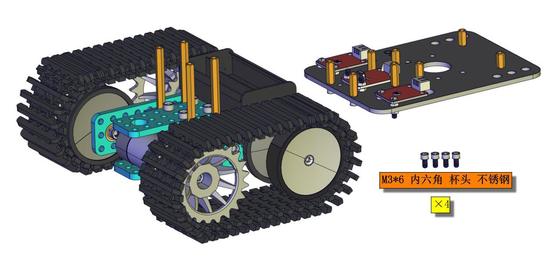
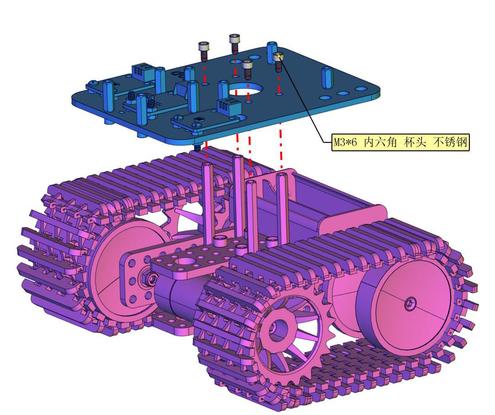
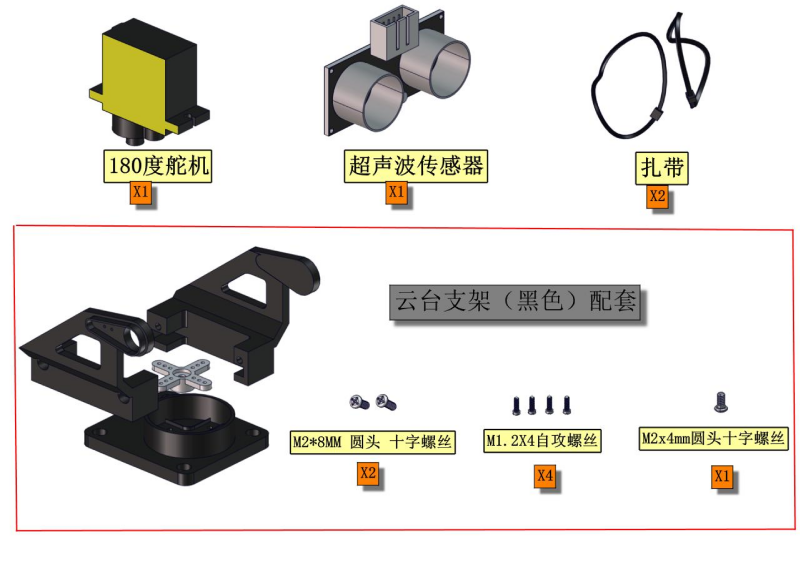
安装4
安装所需零件
安装
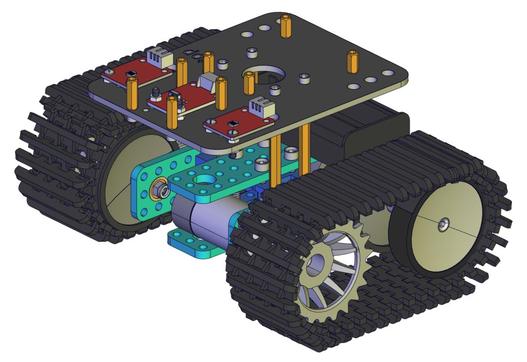
完成
安装5
安装所需零件
安装
完成
安装6
安装所需零件
安装
完成
安装7
安装所需零件
安装
完成

安装8
安装所需零件
安装
完成
安装9
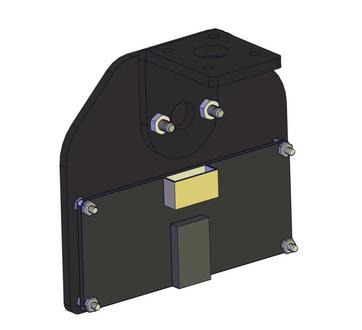
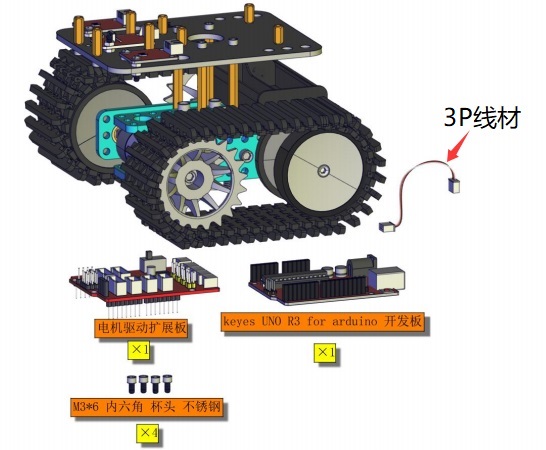
安装所需零件
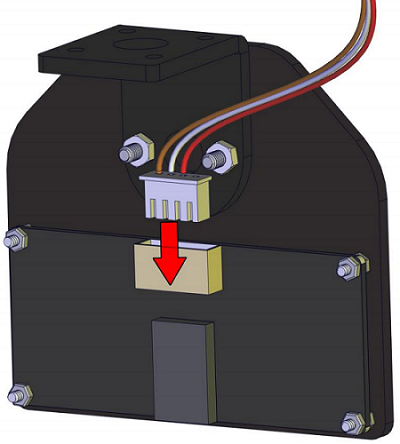
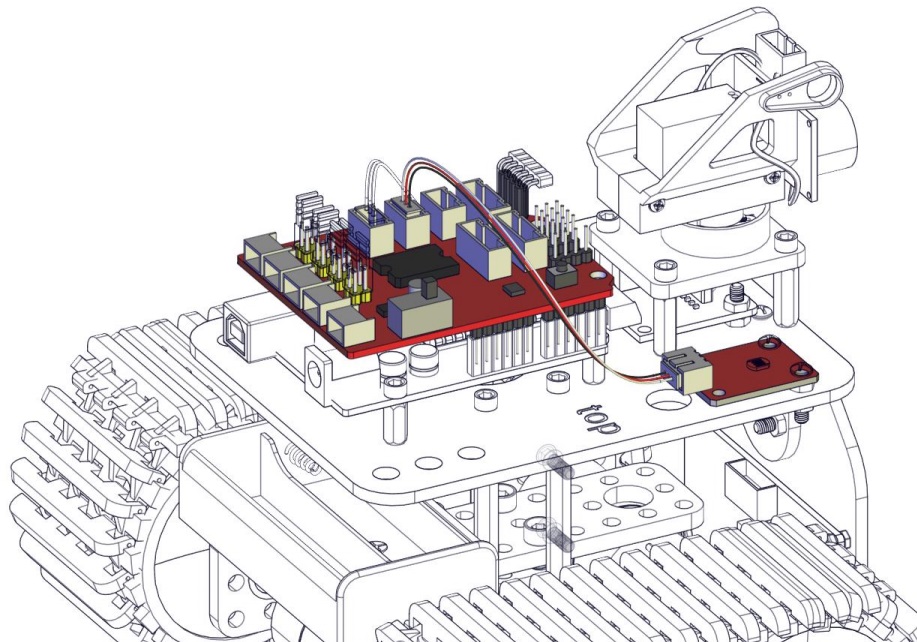
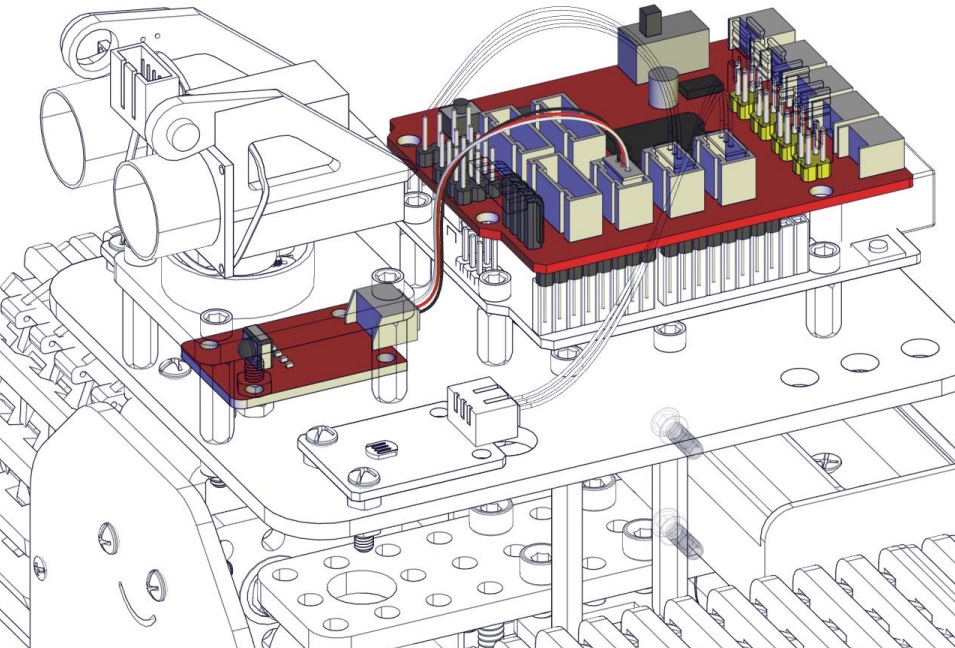
红外接收模块插线
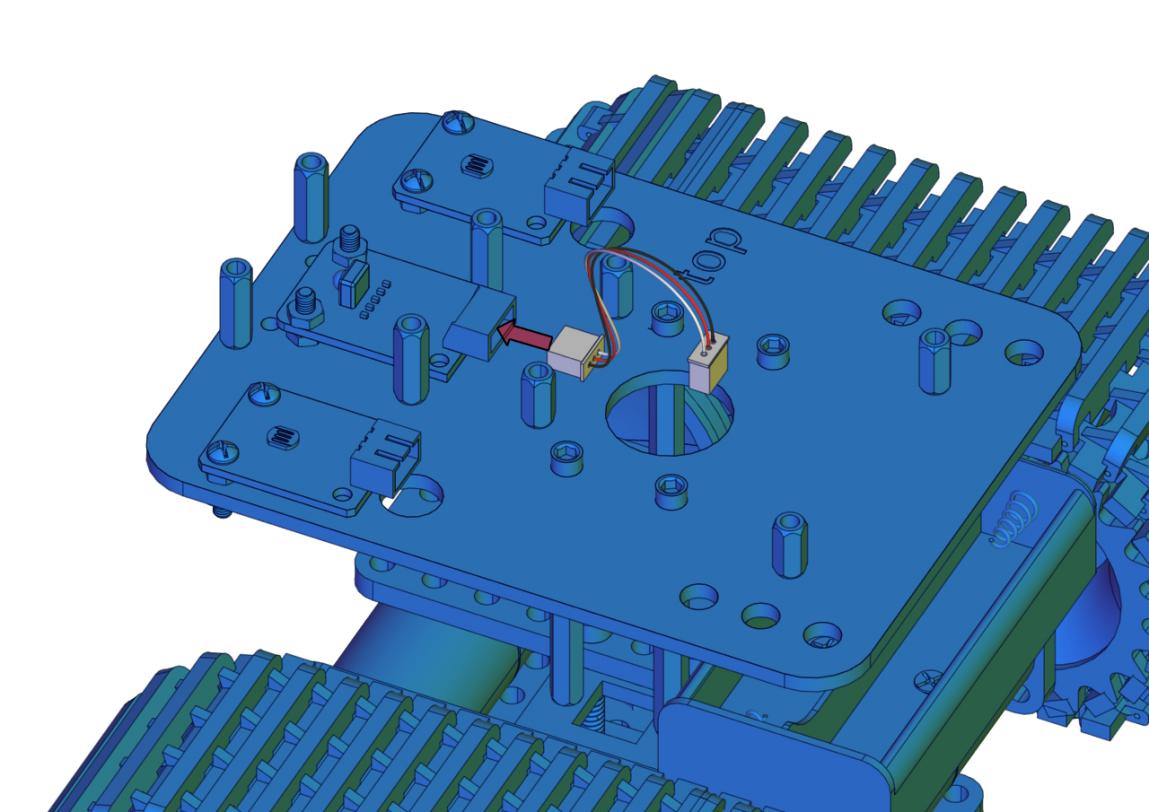
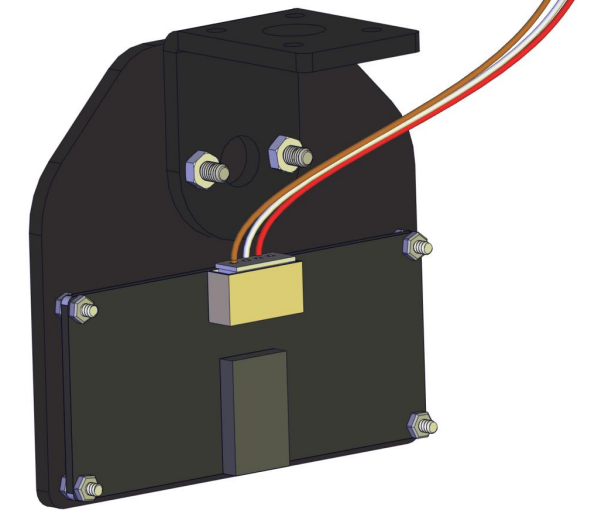
安装
完成(并且将红外接收模块插线的另一端插入扩展板上G 5V D3的接线端)
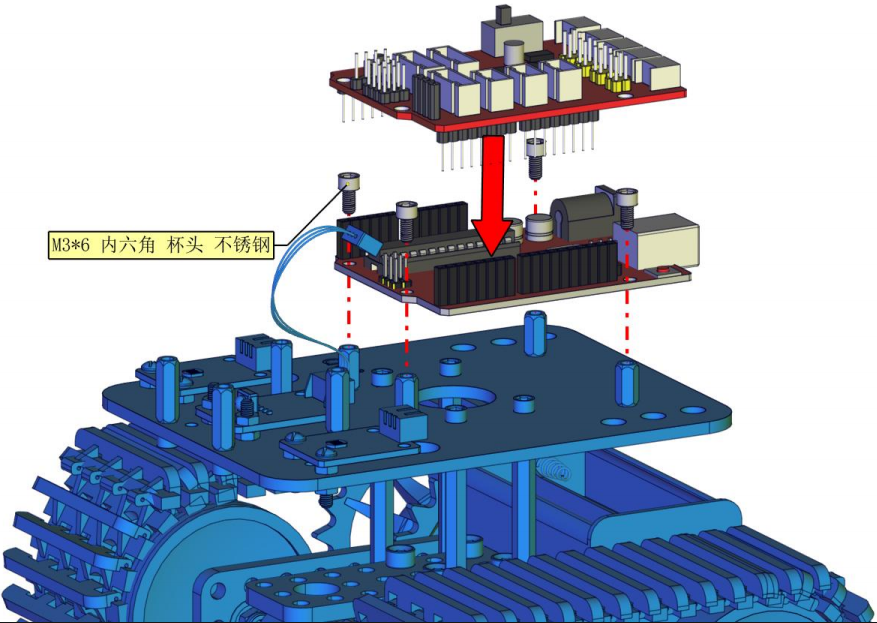
安装10
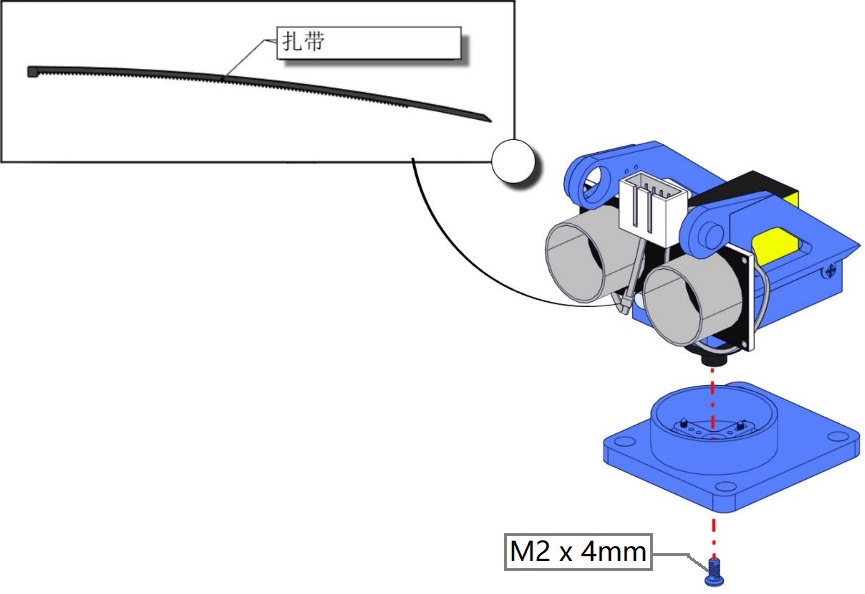
安装所需零件
安装
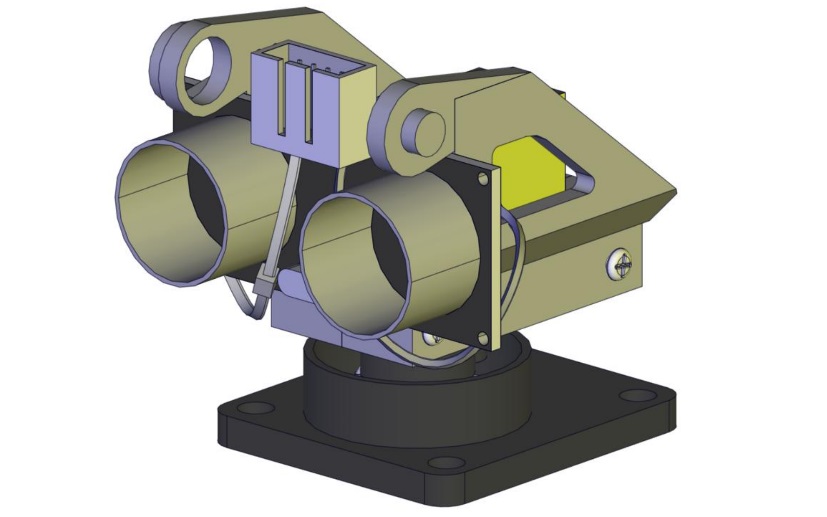
完成
安装11
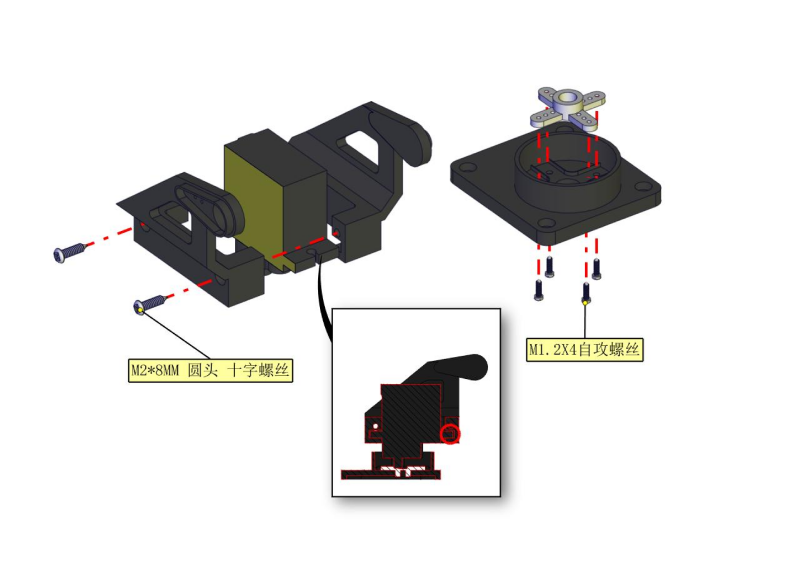
安装所需零件
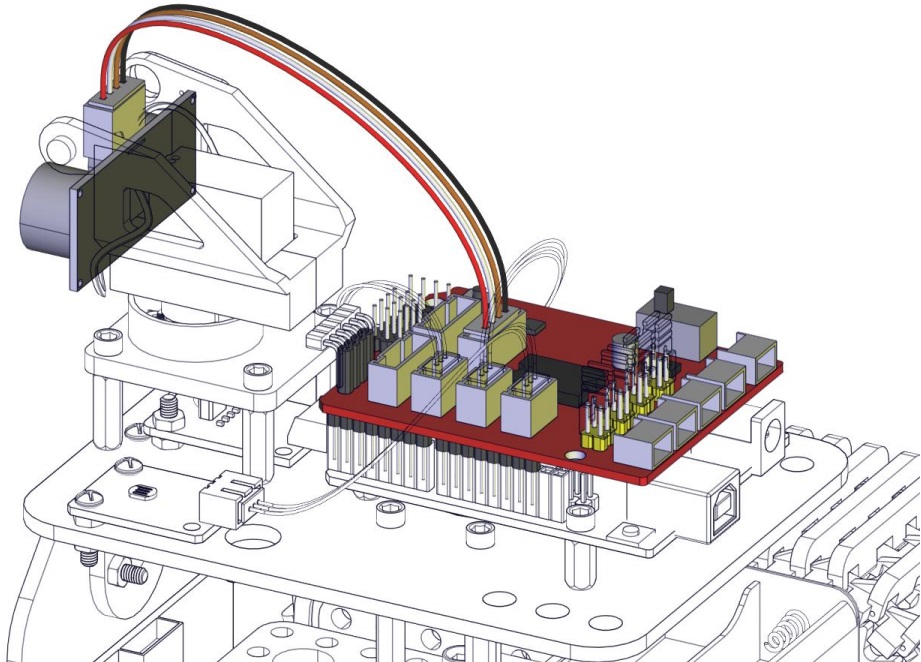
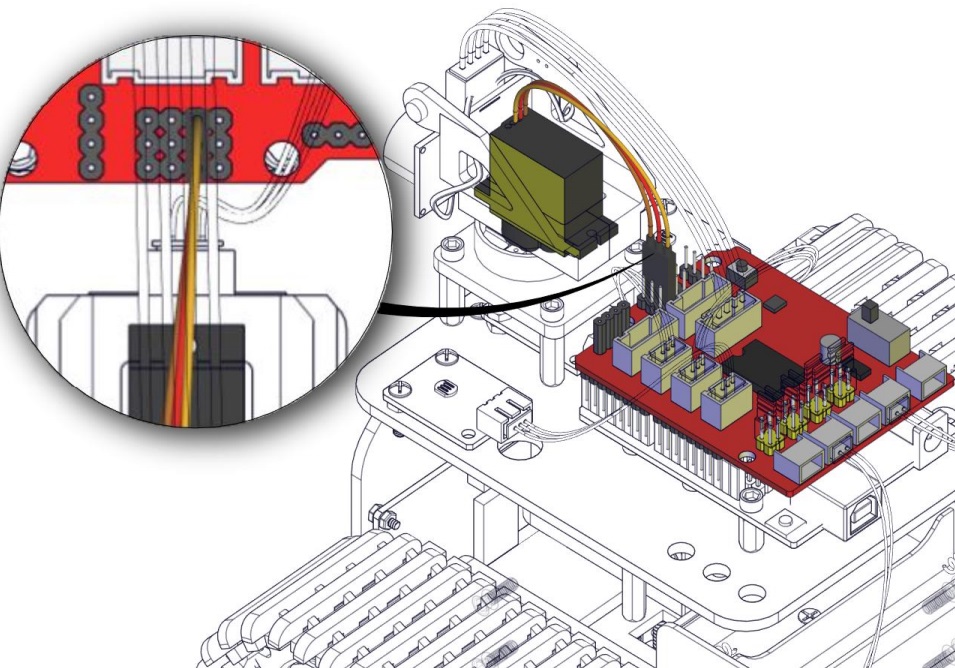
安装前需要调节舵机角度,我们需要将舵机调整到90度再安装
舵机 |
主板 |
|---|---|
棕线 |
G |
红线 |
5V |
橙黄线 |
D10 |
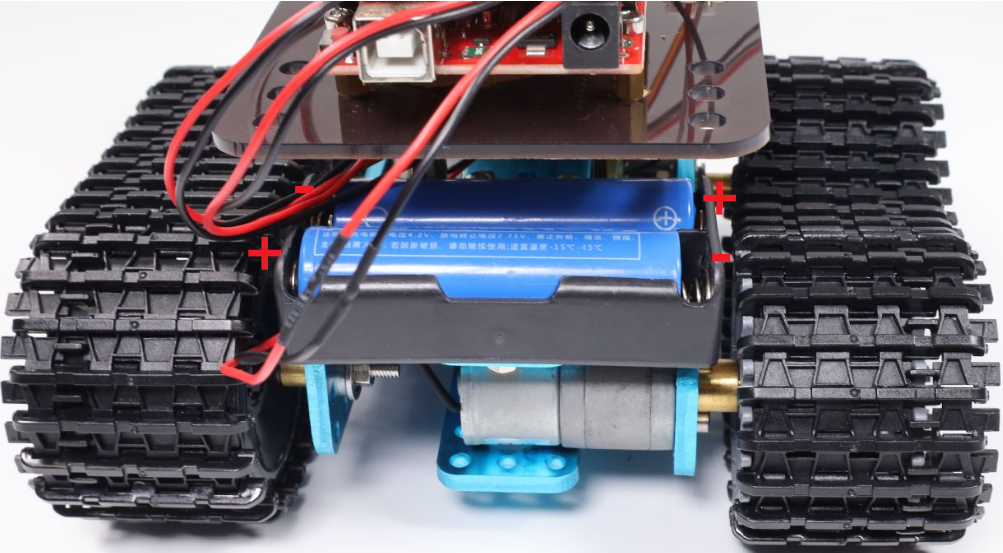
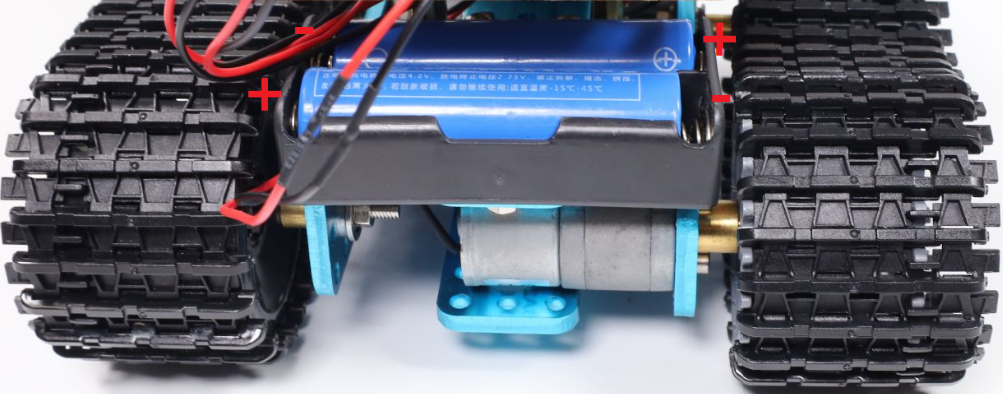
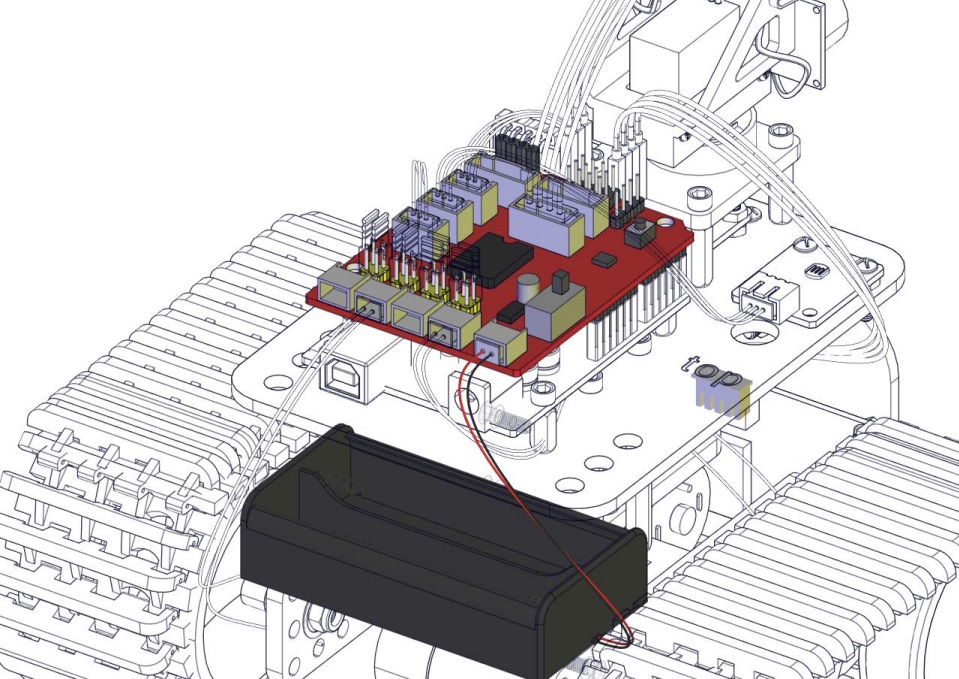
舵机接好线之后,先将电池盒的电源线在扩展板上插好,安上电池,再将拨码开关拨至ON端。 如下图所示:
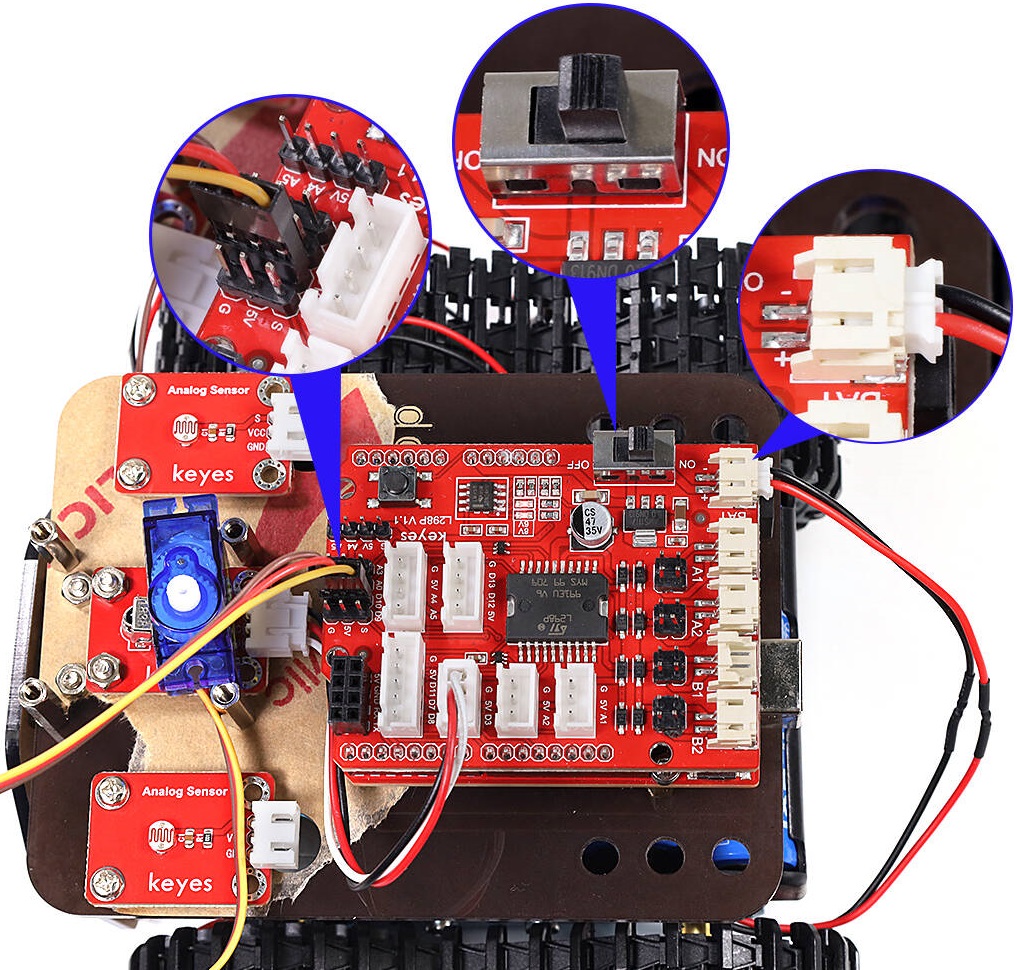
电池安装示范
⚠️特别注意: 初始化舵机角度为90°的代码, 请点击下载:舵机初始化角度_代码

特别提醒: 以下三种方法,根据自己的情况自由选择。
方法一:Arduino 代码
⚠️特别提示: 在编写代码并上传之前,必须安装Arduino IDE,请进入链接查看:ArduinoIDE开发环境设置
/*
舵机初始化角度_代码
http://www.keyes-robot.com
*/
#include <Servo.h>
Servo myservo; // 创建舵机类实例
void setup()
{
myservo.attach(10); //舵机接数字口10
myservo.write(0); // 转动到0角度
delay(500);
myservo.write(180); // 转动到180角度
delay(500);
myservo.write(90); // 转动到90角度
delay(500);
}
void loop(){
}
如何得到它?
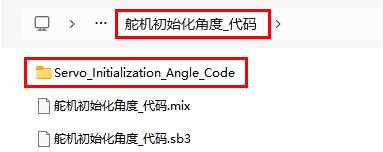
资料提供了调整窗户舵机的代码,请打开并烧录到主板,如下图所示。在文件夹 舵机初始化角度_代码 ,打开文件Servo_Initialization_Angle_Code.ino。或将上述测试代码复制粘贴到Arduino IDE中。
将上述测试代码上传至主板之后,未发现舵机转动,可以按下主板上的复位键。
方法二:KidsBlock(Scratch)代码
⚠️特别提示: 在编写代码并上传之前,必须安装 KidsBlock IDE,请进入链接查看:KidsBlock IDE开发环境设置

如何得到它?
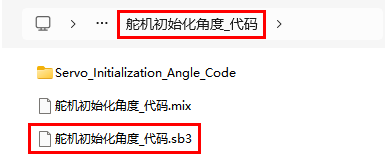
资料提供了调整窗户舵机的代码,请打开并烧录到主板,如下图所示。在文件夹 舵机初始化角度_代码 ,使用 KidsBlock IDE 打开文件 舵机初始化角度_代码.sb3。或在KidsBlock IDE中直接拖动代码块编写上述测试代码。
上传上述测试代码,未发现舵机转动,可以按下主板上的复位键。
方法三:Mixly代码
⚠️特别提示: 在编写代码并上传之前,必须安装 Mixly IDE,请进入链接查看:Mixly IDE开发环境设置

如何得到它?
资料提供了调整窗户舵机的代码,请打开并烧录到主板,如下图所示。在文件夹 舵机初始化角度_代码 ,使用 Mixly IDE 打开文件 舵机初始化角度_代码.sb3。或在KidsBlock IDE中直接拖动代码块编写上述测试代码。

上传上述测试代码,未发现舵机转动,可以按下主板上的复位键。
分步安装1
分步安装2
完成
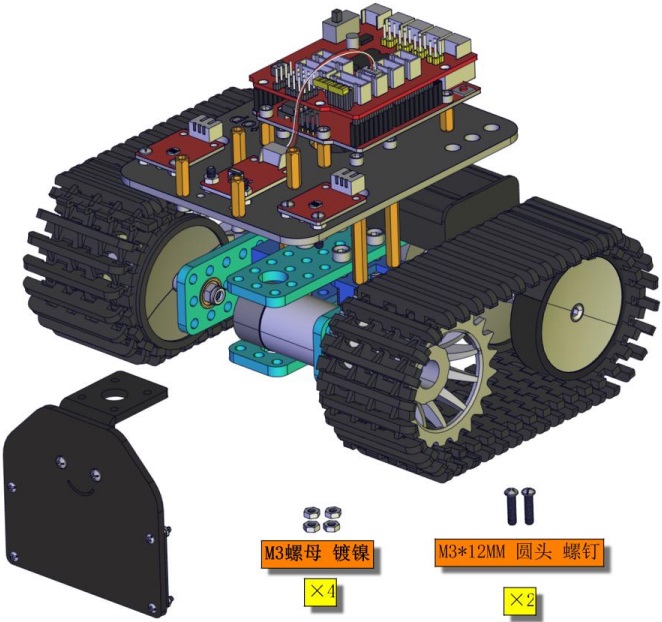
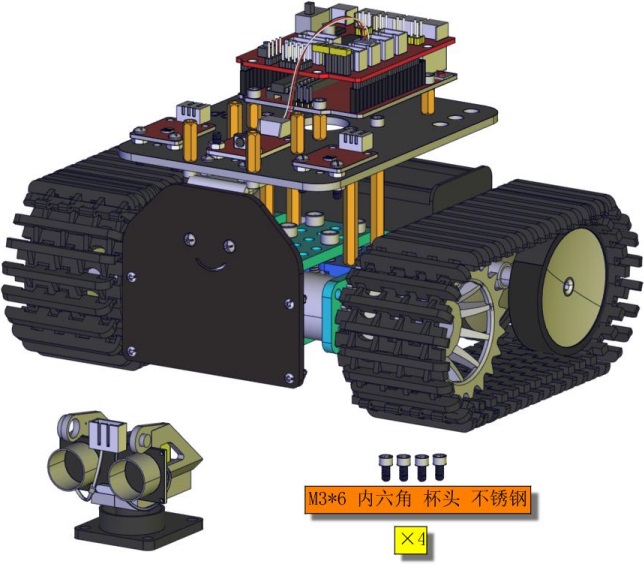
安装12
安装所需零件
安装
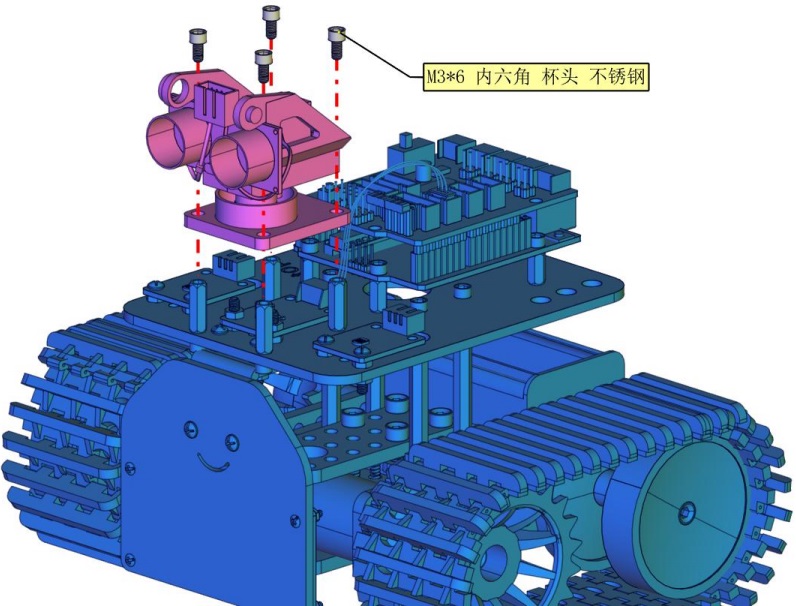
完成
插入针盖
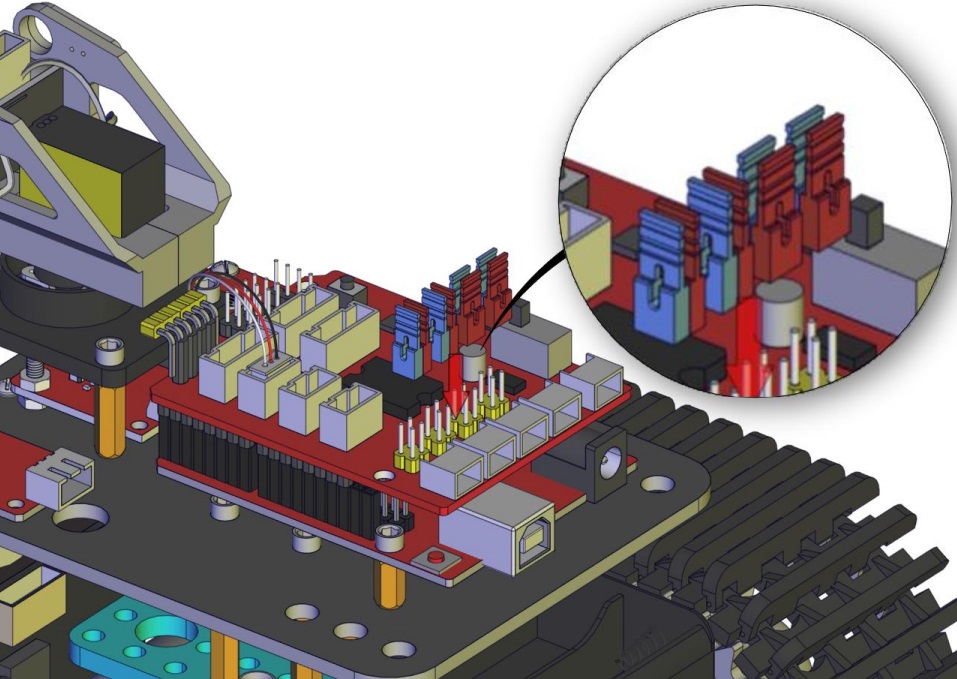
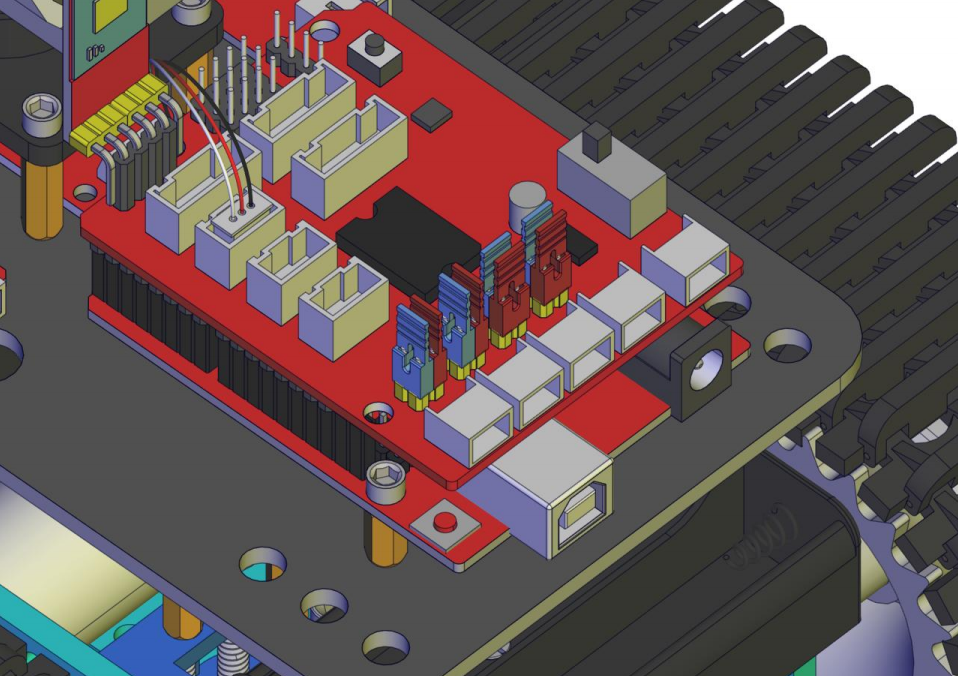
接线示意图
左边光敏接线图
右边光敏接线图
红外模块接线图
超声波模块接线图
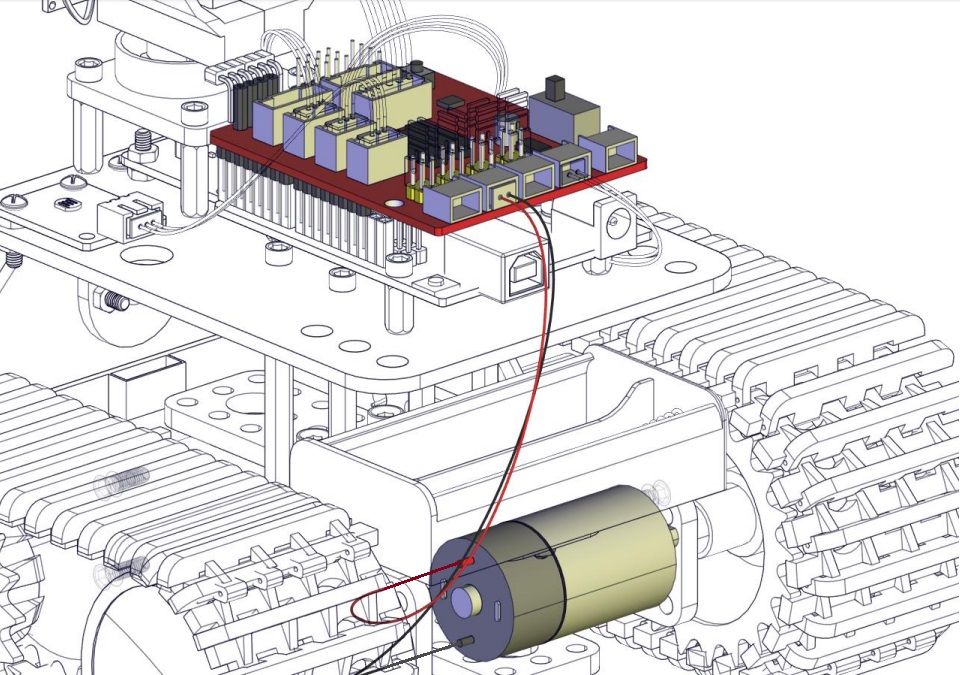
左侧电机接线图
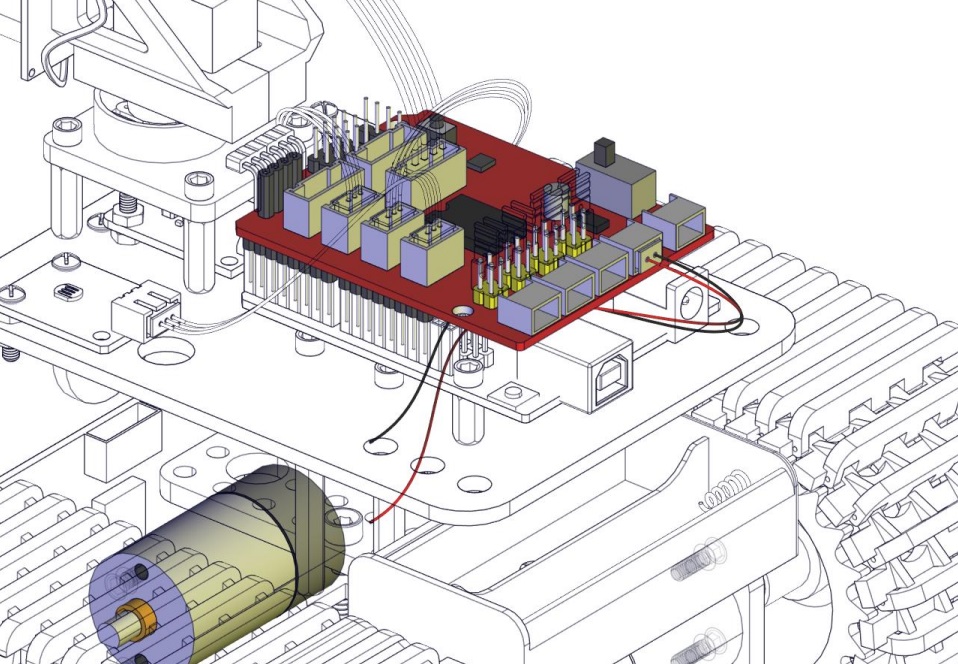
右侧电机接线图
舵机接线图
LED点阵接线图
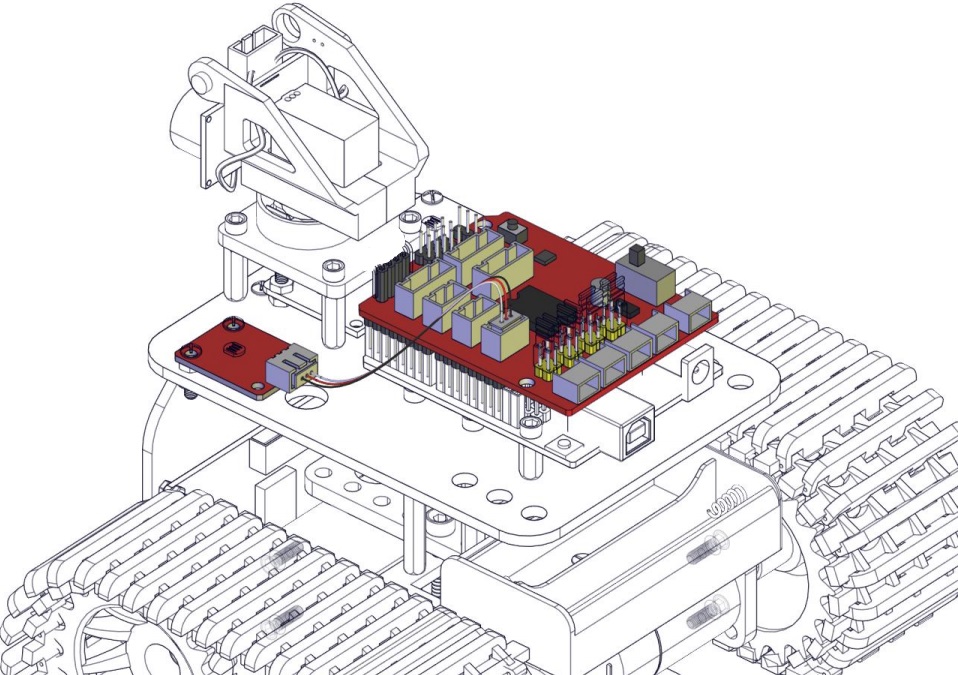
电源接线图
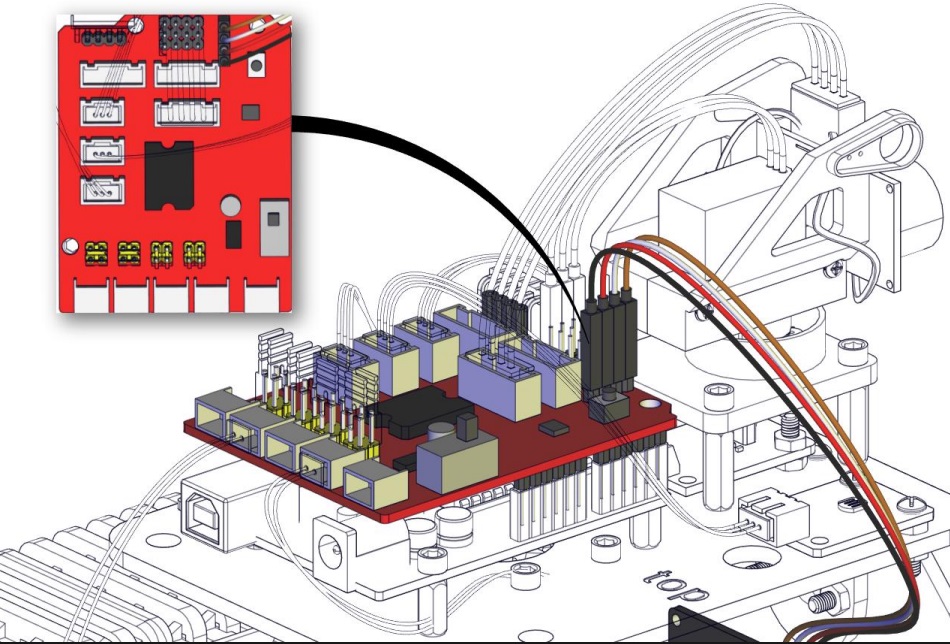
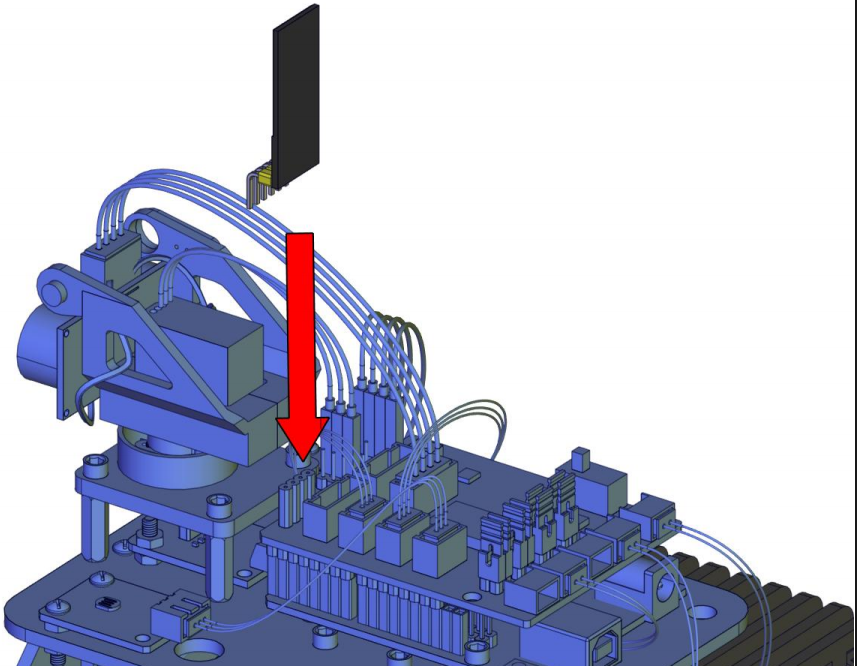
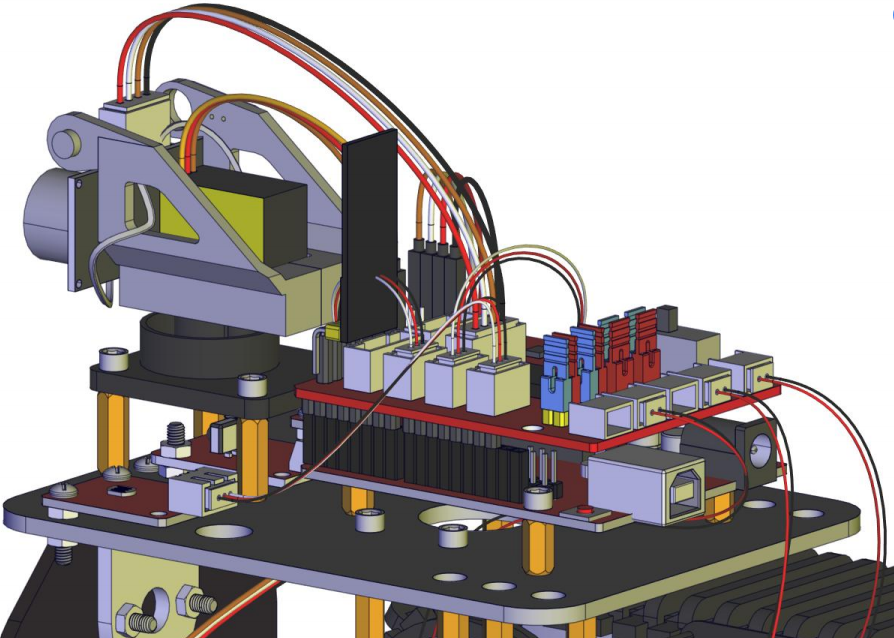
插入蓝牙模块图
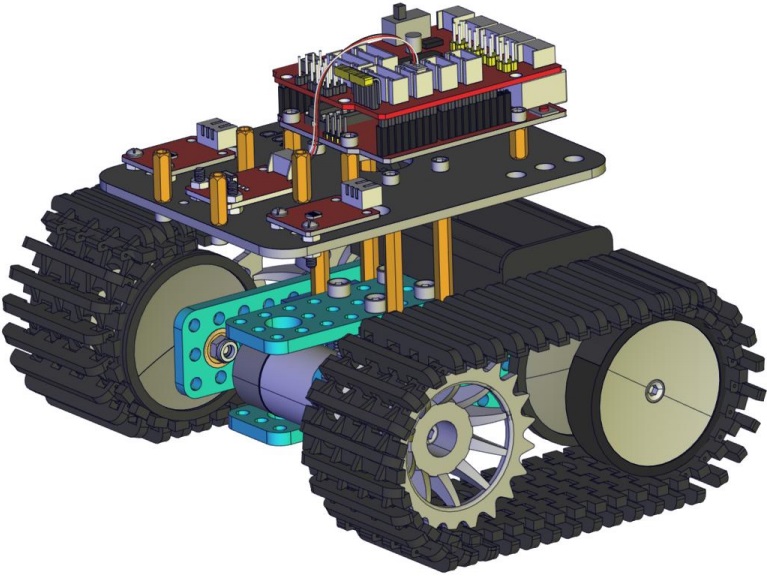
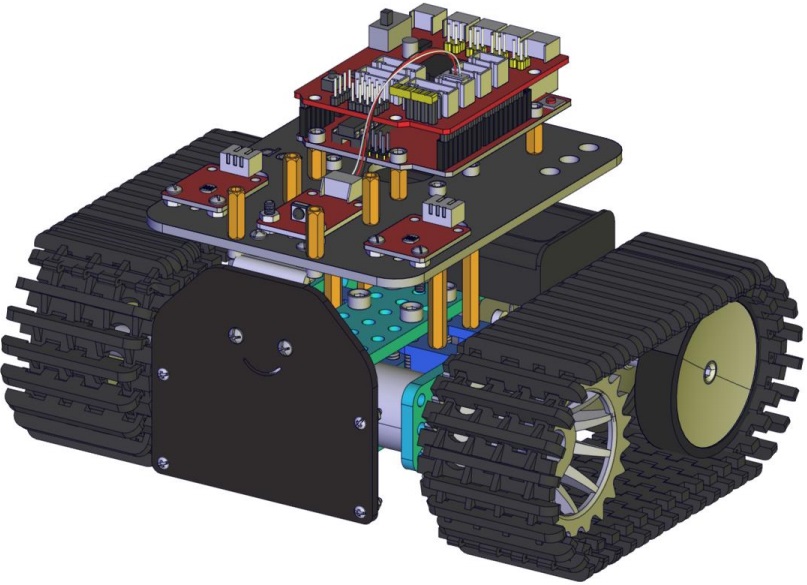
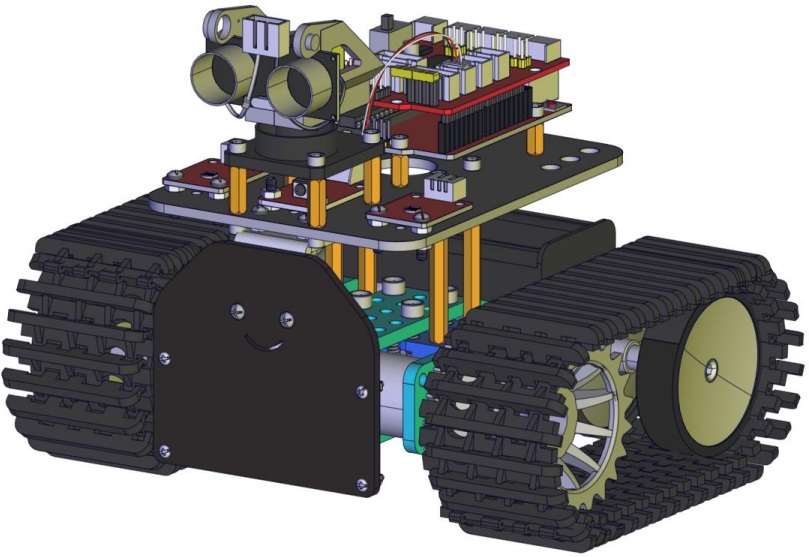
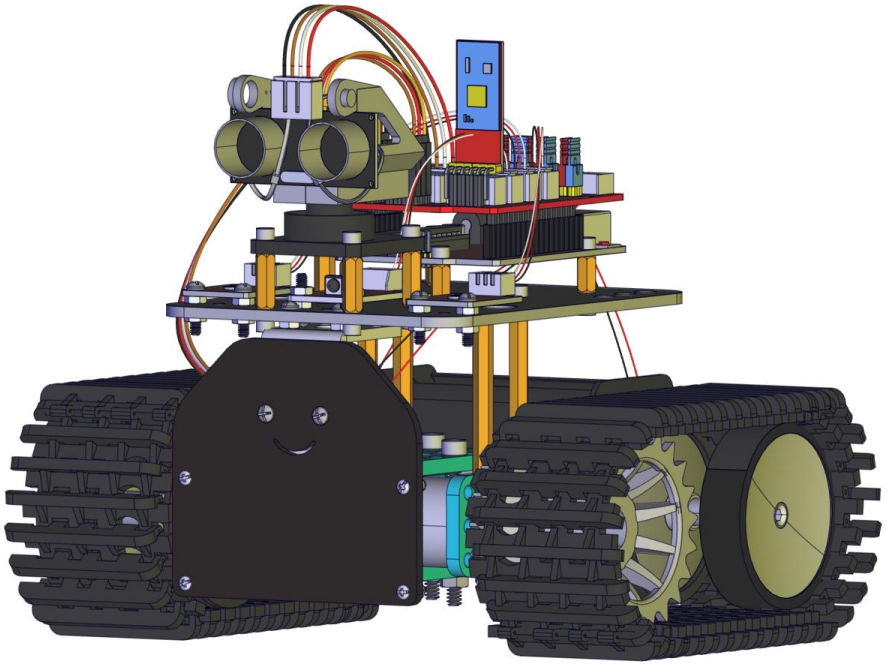
完成渲染图
电池安装示范