1. 迷你坦克机器人介绍#
1.1 简介#
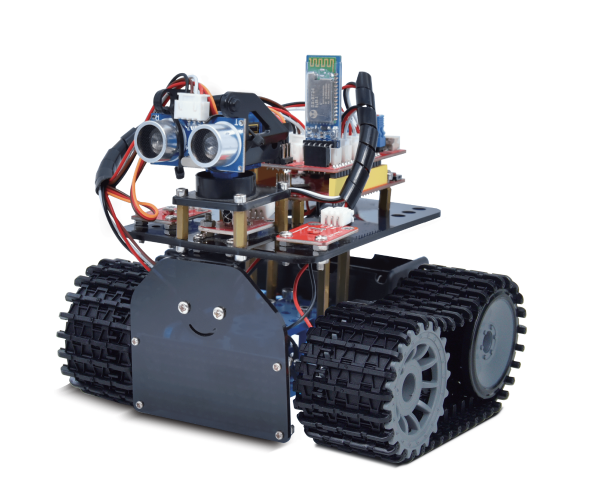
在我们经常可以在网上看到别人利用一些控制板和一些电子元件,自己搭配结构,做出各种外观各种功能的小车。下面我们也要做一款迷你坦克机器人。这款坦克机器人本质上就是一个两驱动的履带车,它的安装有些复杂,我们提供详细的安装文件。这款小车接线非常简单,即使刚接触电子的人都可以搞定。
我们要让机器人听我们的话,就得给机器人下达指令,下指令时说人类的语言没有用,只能编写机器人能听懂的程序语言。
编程不仅对那些未来要当程序员的孩子有用,而且对其他孩子也有很大的作用。编程就是把大问题分割成小问题,然后解决问题的过程,对孩子的逻辑分析能力,创造能力,动手能力,解决问题的能力有极大的提升。
今天给大家推荐一款迷你坦克机器人,这款智能车可以让孩子们轻松学习编程,并且获得有关电子,机械,控制逻辑和计算机科学的实践知识。
他是基于ARDUINO的开源机器人,他的安装和接线十分简单,组件都通过螺钉和铜柱连接,只需要几个简单的步骤就可以组装完成。他提供了十多个编程的课程项目,由简单到复杂,一步一步,学习怎么去编写机器人能”听”懂的语言。
1.2 清单#
当收到这个机器人套件的时候,首先看到是一个包装精美的外盒,每个配件被安全且有序的装在外盒里面的小盒子里,先来清点一下:
No |
Product Name |
Quantity |
Picture |
|---|---|---|---|
1 |
UNO R3 for arduino 开发板 |
1 |
|
2 |
L298P 电机驱动扩展板 V1 |
1 |
|
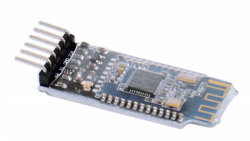
3 |
蓝牙模块 |
1 |
|
4 |
keyes 超声波传感器 |
1 |
|
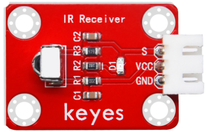
5 |
keyes 红外接收传感器 |
1 |
|
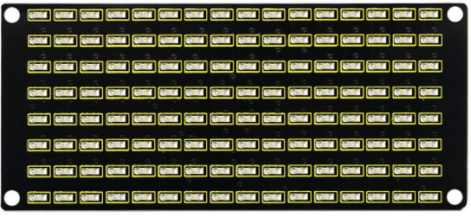
6 |
keyes 8x16 LED灯板模块 |
1 |
|
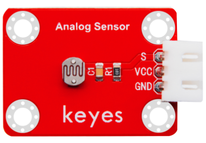
7 |
keyes brick光敏电阻传感器 |
2 |
|
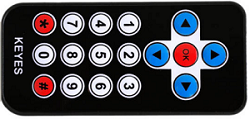
8 |
JMP-1 17键 遥控器 |
1 |
|
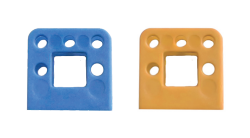
9 |
铝合金拼接板 蓝色 |
4 |
|
10 |
keyes 草帽LED白发红模块 |
1 |
|
11 |
2.54三连pin 母对母杜邦线 |
1 |
|
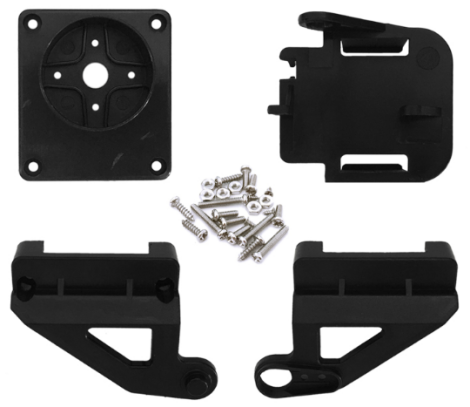
12 |
云台支架 |
1 |
|
13 |
固定架 |
2 |
|
14 |
L型支架 |
1 |
|
15 |
舵机 |
1 |
|
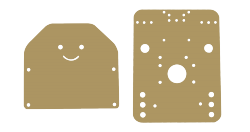
16 |
迷你履带坦克机器人套件 V2.0 亚克力板 |
1 |
|
17 |
履带式坦克底盘驱动轮 |
2 |
|
18 |
履带式坦克底盘承重轮 |
2 |
|
19 |
履带 |
0.78 |
|
20 |
GA25Y310 6V 145 DC6V 150rpm 大钮距金属直流电机+250MM PH2.0mm-2P线材环保 |
2 |
|
21 |
铝件 联轴器 |
2 |
|
22 |
18650双节 电池盒 |
1 |
|
23 |
USB 线 AM/BM |
1 |
|
24 |
铝套 |
2 |
|
25 |
法兰轴承 原装电机级 |
4 |
|
26 |
双通M3*10MM六角铜柱 |
4 |
|
27 |
双通M3*15MM 镀镍 六角铜柱 |
4 |
|
28 |
双通M3*45MM六角铜柱 |
4 |
|
29 |
M3*10MM 平头螺钉 |
3 |
|
30 |
M3*6 内六角螺钉 |
22 |
|
31 |
M3*8 内六角螺钉 |
8 |
|
32 |
M3*25MM 内六角螺钉 |
4 |
|
33 |
M4*40 内六角螺钉 |
4 |
|
34 |
M4*50MM 内六角螺钉 |
2 |
|
35 |
M4*12MM 内六角螺钉 |
6 |
|
36 |
M3 镀镍 螺母 |
24 |
|
37 |
M4 镀镍 自锁螺母 |
2 |
|
38 |
M2*10MM 圆头 螺钉 |
6 |
|
39 |
M3*12MM 圆头 螺钉 |
12 |
|
40 |
M4 镀镍 螺母 |
12 |
|
41 |
M2 镀镍 螺母 |
10 |
|
42 |
HX-2.54 3P 双头连接线 |
3 |
|
43 |
HX-2.54 4P 双头连接线 |
1 |
|
44 |
HX-2.54 4P 转杜邦线母单连接线 |
1 |
|
45 |
缠绕管 |
0.12 |
|
46 |
紫黑色 红黑色 十字螺丝刀 |
1 |
|
47 |
扎带 |
6 |
|
48 |
L型 M1.5 M2.5 M3 镀镍 内六角扳手 |
1 |
|
52 |
M3*4MM 机米螺丝 |
2 |
|
53 |
M3+M4 小扳手 |
1 |
|





































1.3 特点#
1.功能多多:避障功能,跟随功能,红外遥控,蓝牙控制,追光功能,显示图案等。
2.组装简单:无需焊接电路,只需几个简单的步骤即可组装该机器人。
3.结构坚固:构成车体的部分是PCB材质,电机用是优质的金属电机。
4.扩展性强:配置了电机驱动扩展板,可以扩展其他的传感器和模块。
5.多种控制:红外遥控器控制,手机遥控控制(苹果和安卓手机都可)。
6.学习基础编程:使用Arduino IDE的C语言编程,可以接触底层代码。
1.4 参数#
电机转速:6v 转速150转/分。
控制电机选用L298P驱动扩展板,自带电源控制开关。
超声波感应角度:<15度
超声波探测距离:2cm-400cm
红外遥控距离:10米(实测)
蓝牙遥控距离:50米(实测)
光敏电阻模块,检测坦克机器人两边光照强度,控制坦克机器人。
蓝牙APP控制:支持Android和IOS系统
可接入外部7~12V的电压。并能搭载多款传感器模块,根据您的想象力实现各种功能.
1.5 UNO R3开发板#
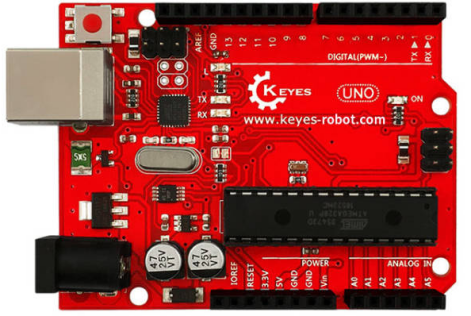
在开始所有的项目之前,我们首先要了解下面这片arduino uno R3开发板,因为这个智能车的核心就是这个开发板。

ARDUINO UNO R3 开发板是我们最新推出的一款易用型开源控制器,硬件上与Arduino UNO相比并没有大的变动。外观上我们将蓝色换成了红色,给你们一种新的体验。硬件上,我们用ATmega16U2代替了8U2,这个更新为是USB接口芯片服务的,理论上它让UNO能模拟USB HID,比如 MIDI/Joystick/Keyboard。
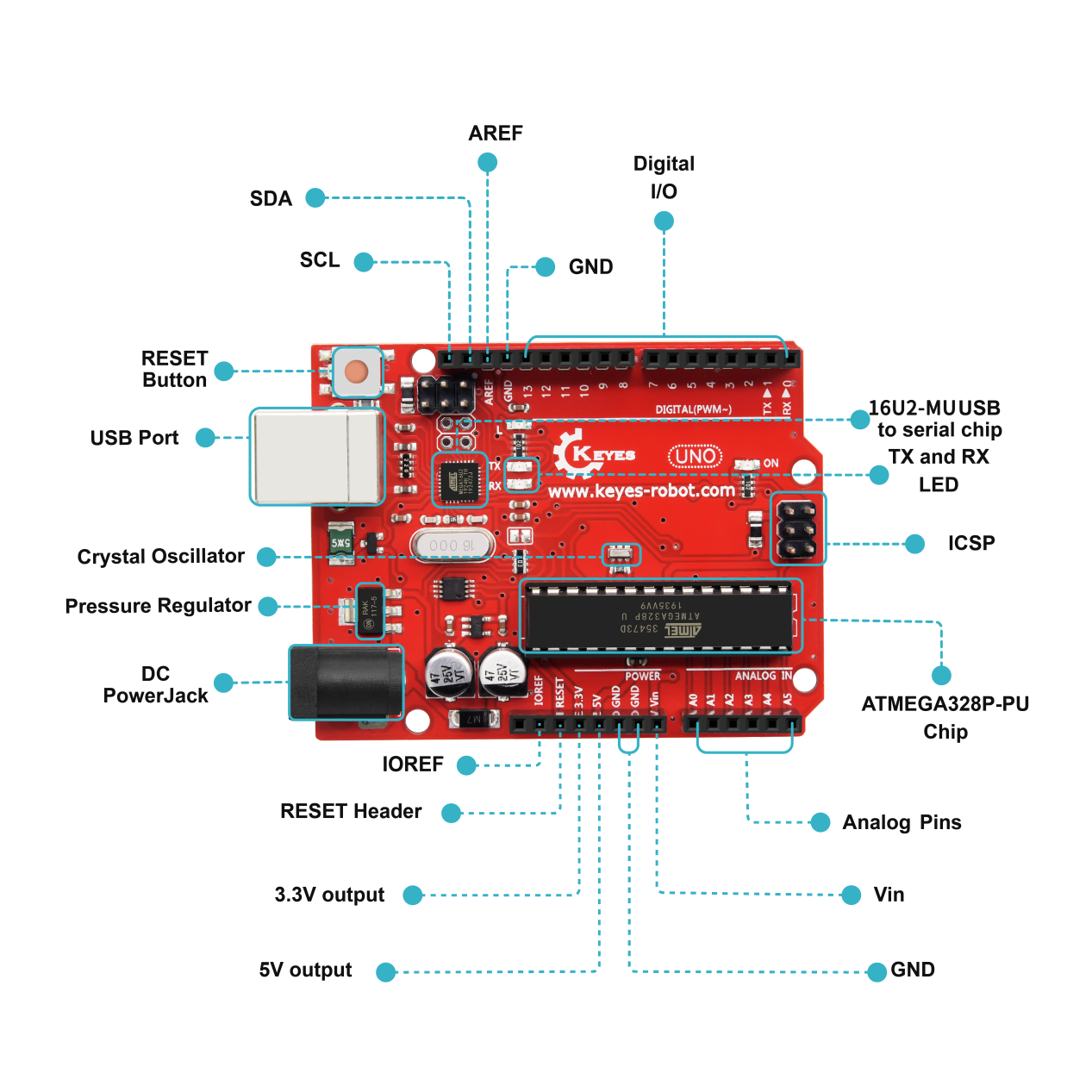
它具有14个数字输入/输出引脚(其中6个可用作PWM输出),6个模拟输入,一个16 MHz石英晶体,一个USB连接,一个电源插孔,2个ICSP接头和一个复位按钮。
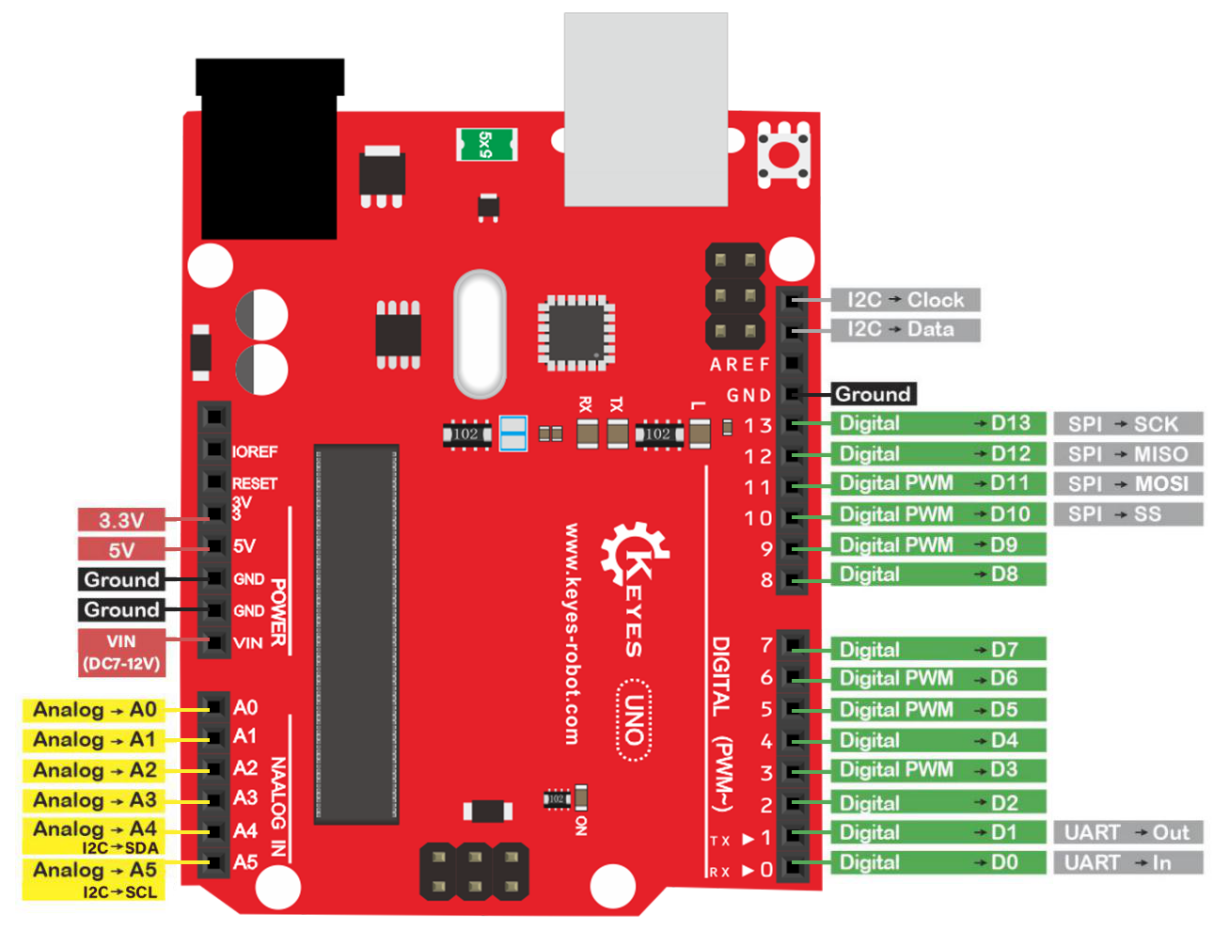
它包含支持微控制器所需的一切;只需使用USB电缆将其连接到计算机,或使用AC-DC适配器或电池为其供电即可开始使用。
Microcontroller |
ATmega328P-PU |
|---|---|
Operating Voltage |
5V |
Input Voltage (recommended) |
DC7-12V |
数字引脚 |
14 (D0-D13) (其中包含6个PWM输出口) |
PWM引脚 |
6 个(D3, D5, D6, D9, D10, D11) |
模拟输入引脚 |
6 个(A0-A5) |
每个I / O引脚的直流电流 |
20 mA |
3.3V引脚的直流电流 |
50 mA |
Flash Memory |
32 KB (ATmega328P-PU) of which 0.5 KB used by bootloader |
SRAM |
2 KB (ATmega328P-PU) |
EEPROM |
1 KB (ATmega328P-PU) |
时钟频率 |
16 MHz |
LED按键 |
D13 |
1.6 L298P电机驱动扩展板#
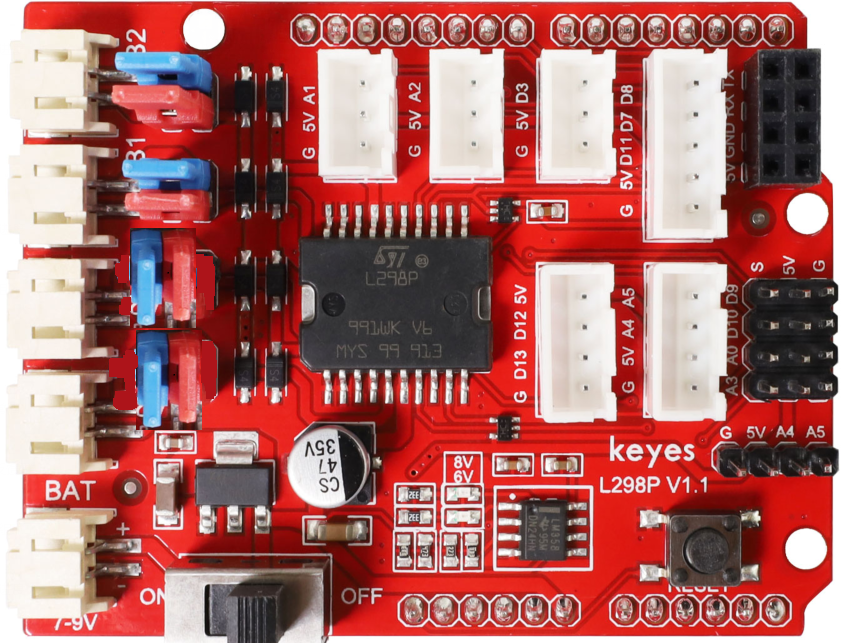
1、概述
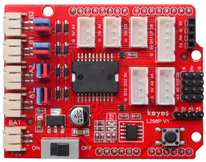
驱动电机的方法有很多,利用的L29P芯片驱动电机是非常常用的一种方案。 L298P是ST意法半导体公司出品的优秀大功率电机专用驱动芯片,可直接驱动直流电机、二相、四相步进电机,驱动电流达2A,电机输出端采用8只高速肖特基二极管作为保护。我们根据L298P的电路设计了一款扩展板,叠层的设计可直接插接到UNO R3板上使用,降低了用户使用和驱动电机的技术难度。
当我们将驱动扩展板堆叠在UNO R3板后,BAT上电后,将拨码开关拨至ON端,外接电源同时给驱动扩展板和UNO R3板供电。驱动扩展板上电机和电源接口为PH2.0-2P防反接口,防止你电源接反导致电路损坏和电机方向乱接,增加测试难度。
同时,驱动扩展板上自带一个间距为2.54mm的排母接口,也是串口通讯接口,兼容市面上常用的蓝牙模块线序,如HC-06模块、HM-10模块。为方便外接其他传感器/模块,驱动板上还自带3个XH-2.54mm 3P防反接口,2个XH-2.54mm 4P防反接口,1个XH-2.54mm 5P防反接口。扩展板还利用间距为2.54mm的排针扩展了2个数字口接口,2个模拟口接口和1个I2C通讯接口。扩展板上还自带一个复位按键,方便你随时进行复位处理。
扩展板可以连接4个直流电机,默认跳线帽连接方式时,A1和A2,B1和B2接口电机并联,运动规律相同。8个跳线帽可用于控制4个电机接口的转动方向,例如当A1电机接口前方2个跳线帽由横向连接改为纵向连接时,A1电机的转动方向就和原来的转动方向相反。
2、规格参数
DC输入电压:DC7V~9V
逻辑工作电流:最大36mA
电机驱动电流:最大2A
最大功耗:25W(温度=75℃)
工作温度:0 ~ 50℃
尺寸大小:69x53x26mm
重量:25.5克
3、L298P电机驱动扩展板示意图
6V LED指示灯:当外接电源电压低于6.2V时,LED熄灭;高于6.2V时,LED亮起。
8V LED指示灯:当外接电源低于8V时,LED熄灭;高于8V时,LED亮起。
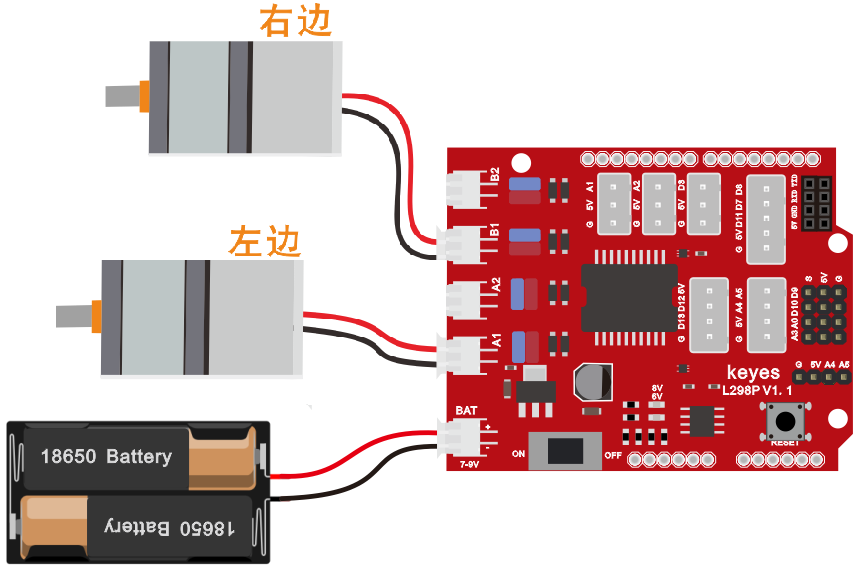
4、L298P电机驱动扩展板连接电机图