多功能小乌龟智能车安装#
安装1
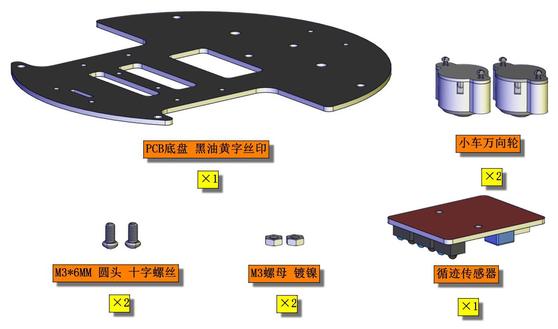
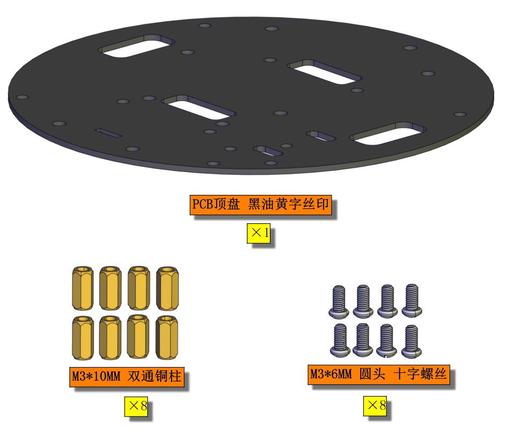
安装所需零件
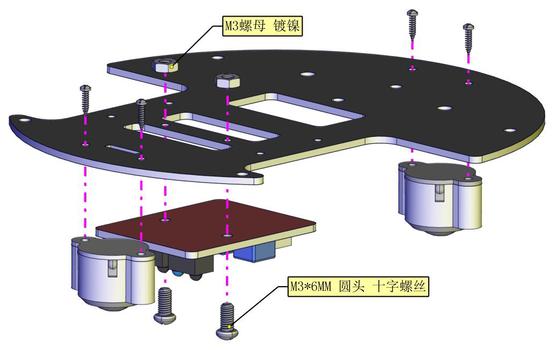
安装(丝印A,B字母朝上)
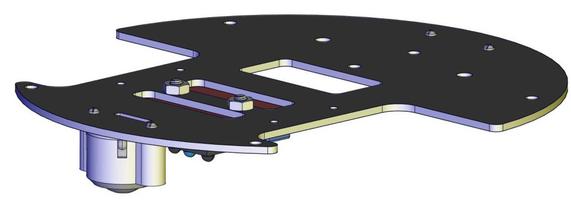
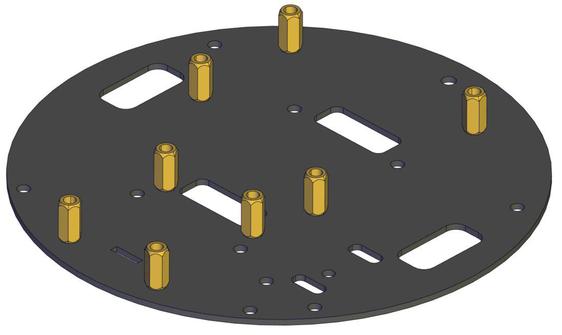
完成
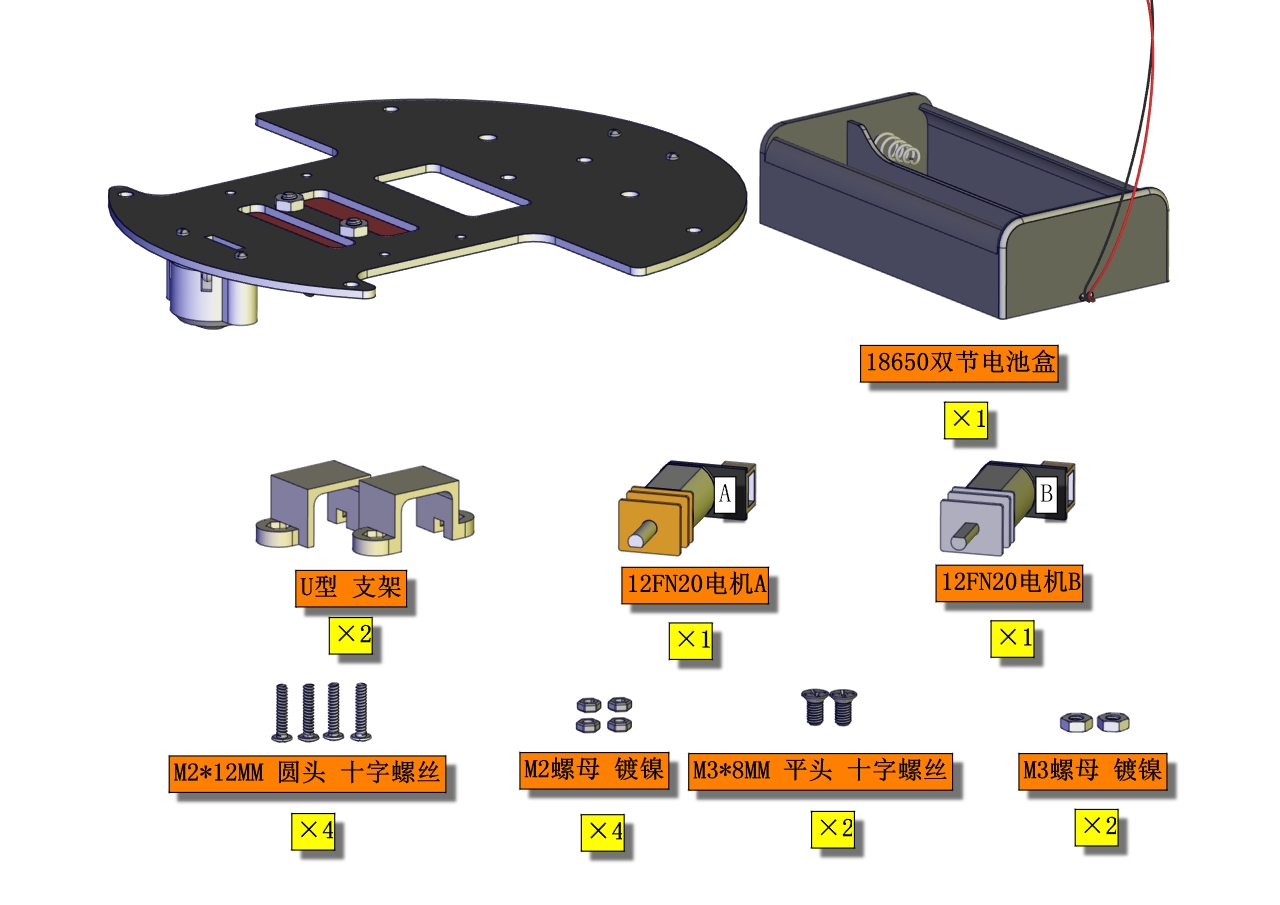
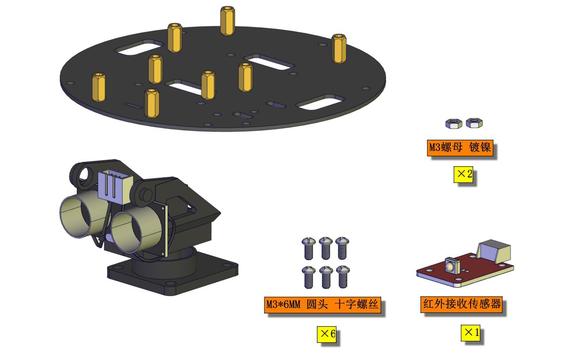
安装2
安装所需零件
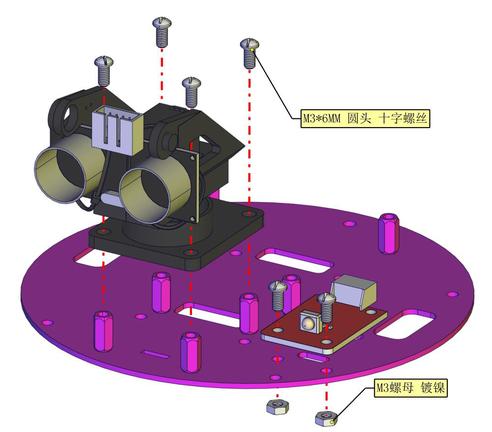
安装(注意电机对应位置)
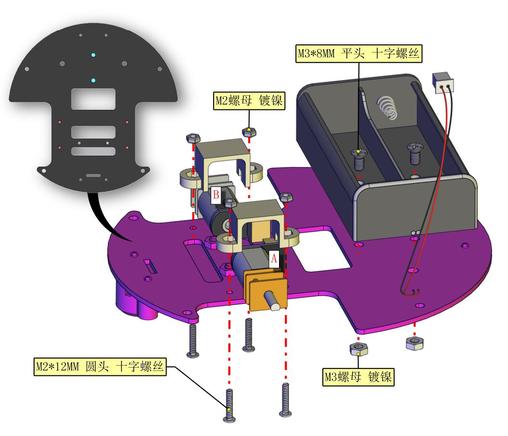
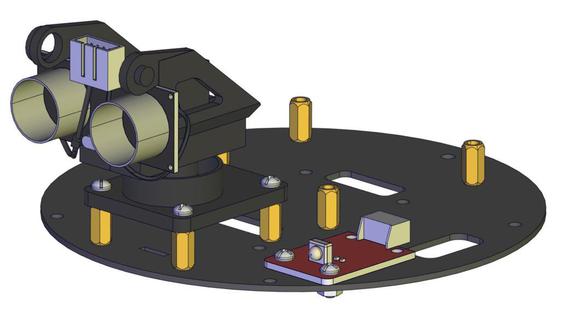
完成 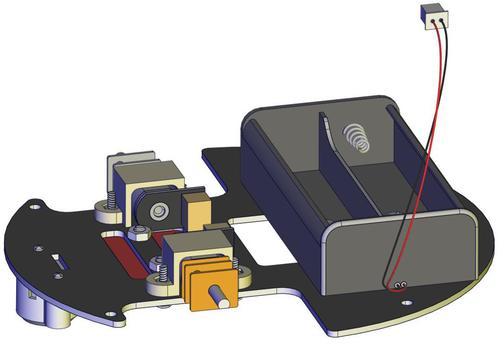 安装3
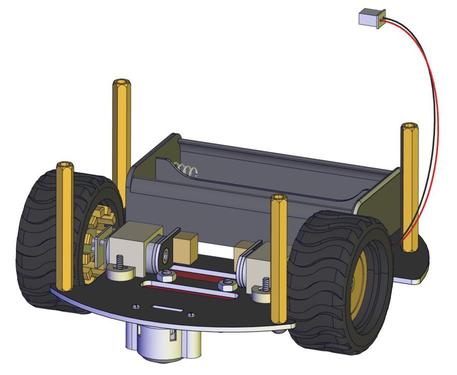
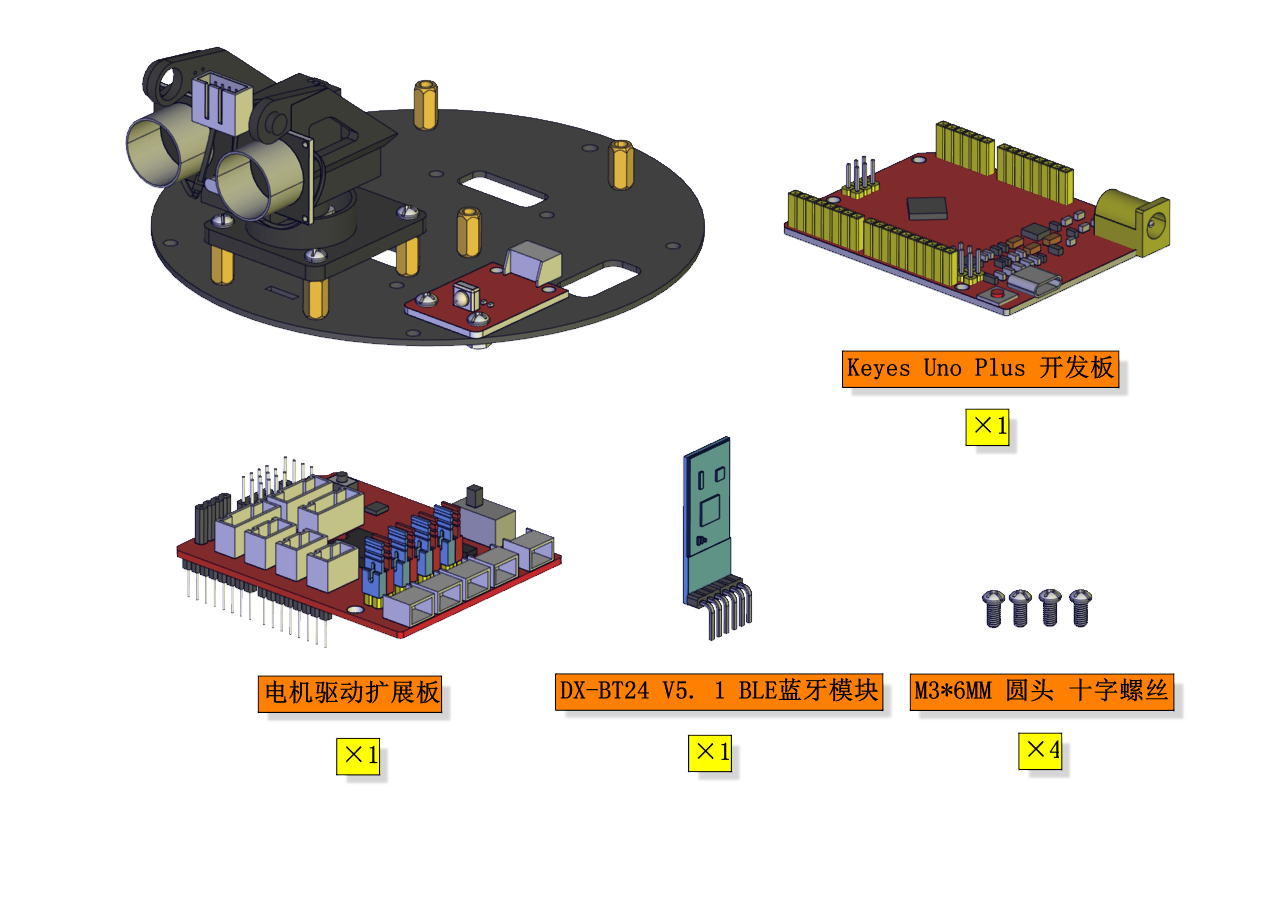
安装3
安装所需零件 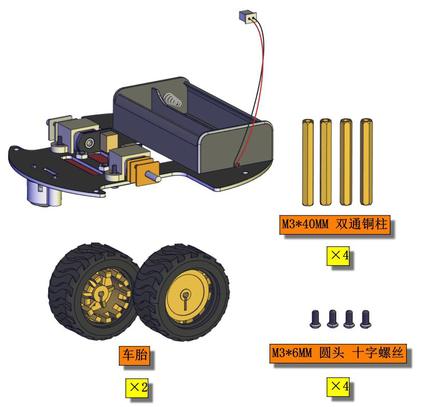
安装 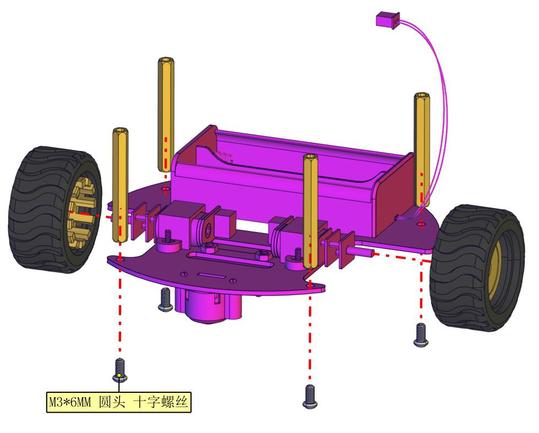
完成
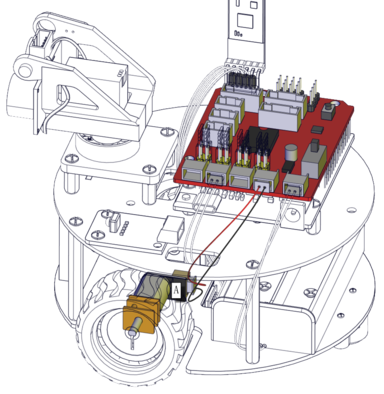
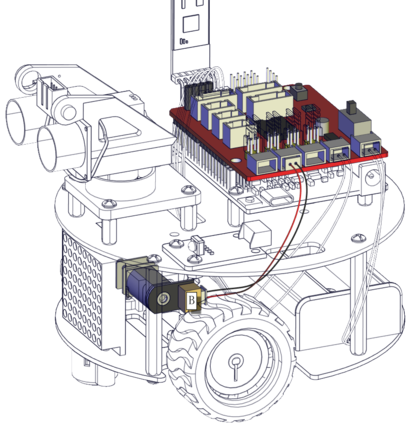
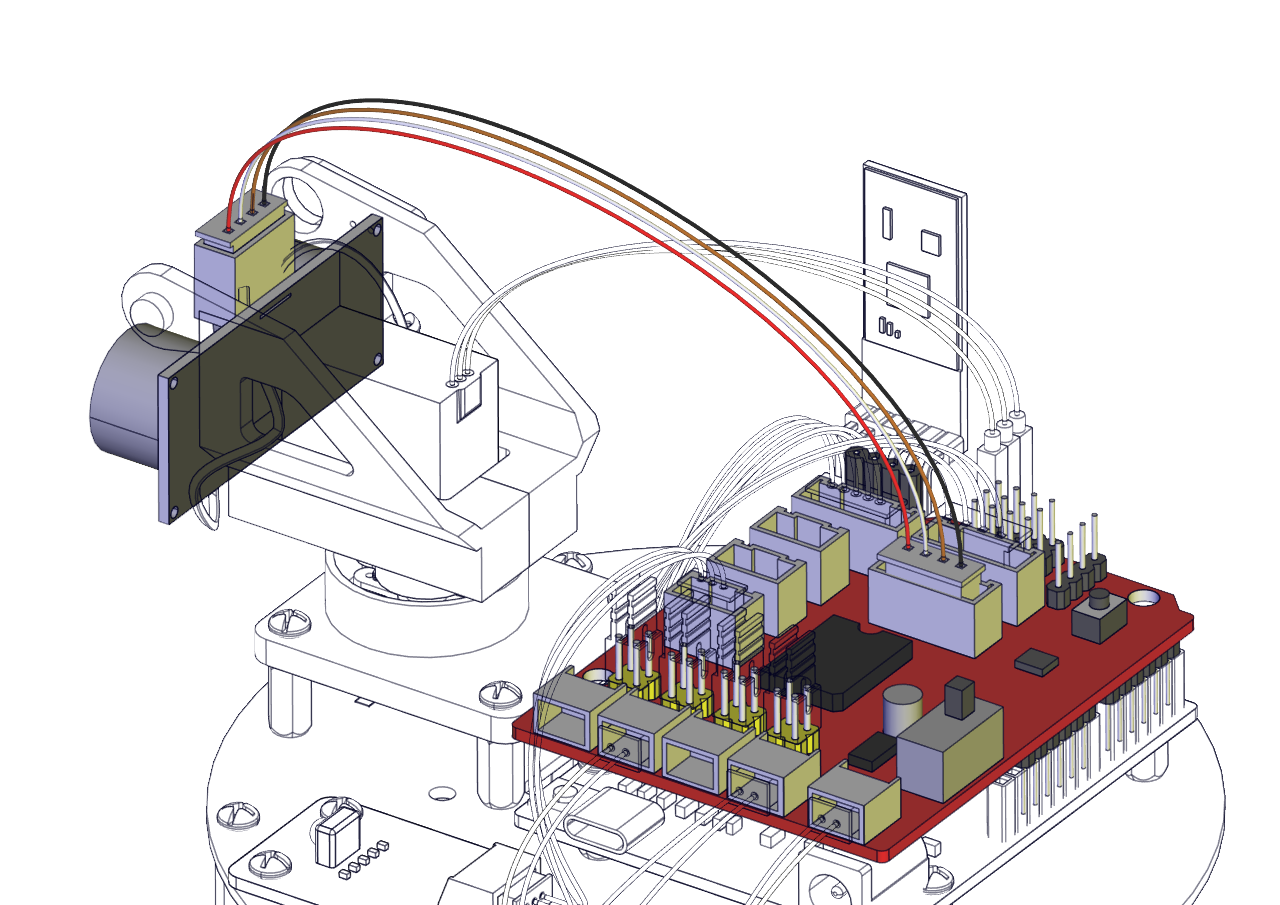
安装完后需先给A,B电机插线
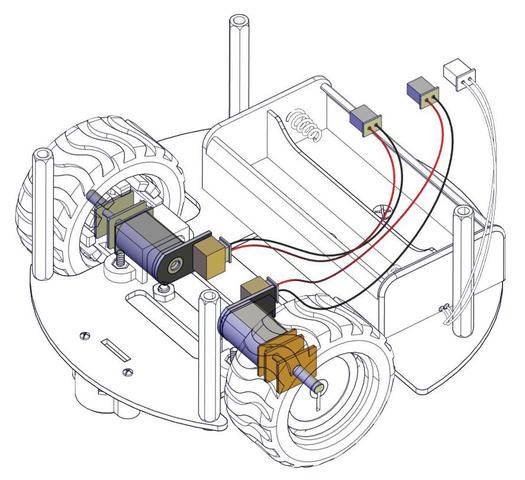
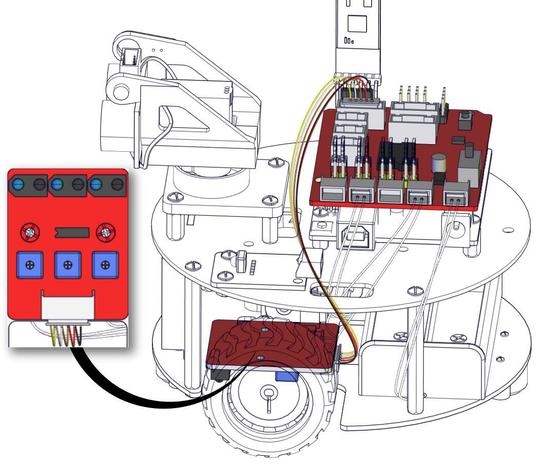
循迹传感器插线
安装4
安装所需零件
安装 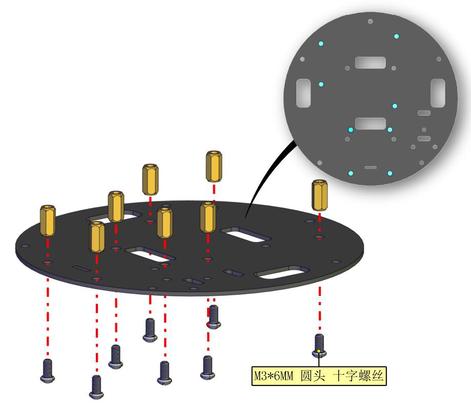
完成
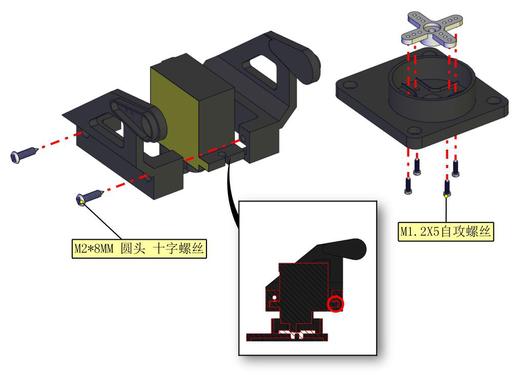
安装5
安装所需零件

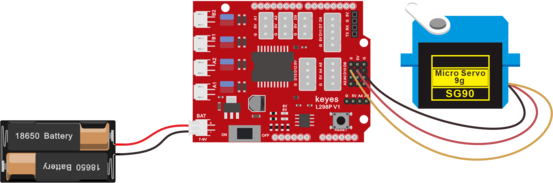
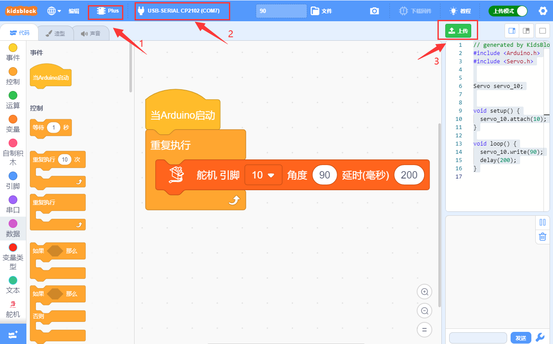
重要:安装前需要将舵机的角度初始化为90度,操作如下:把舵机接到驱动板的10号引脚后叠加到PULS控制板上如下图
上传程序
(1)Arduino ide 教程:复制下面的程序或者打开资料下的servo程序
#define servoPin 10 //舵机接数字口10
int pos; //舵机的角度变量
int pulsewidth; //舵机的脉宽变量
void setup() {
pinMode(servoPin, OUTPUT); //舵机引脚设置为输出
procedure(90); //设置舵机的角度为90度
}
void loop() {
procedure(90); // 转动到pos角度
}
//控制舵机的函数
void procedure(int myangle) {
pulsewidth = myangle * 11 + 500; //计算出脉宽值
digitalWrite(servoPin, HIGH);
delayMicroseconds(pulsewidth); //高电平持续的时间,就是脉宽
digitalWrite(servoPin, LOW);
delay((20 - pulsewidth / 1000)); //周期是20ms,所以低电平持续剩下的时间
}
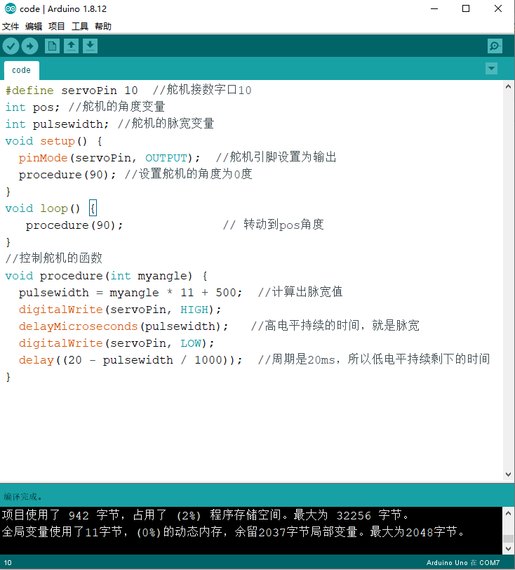
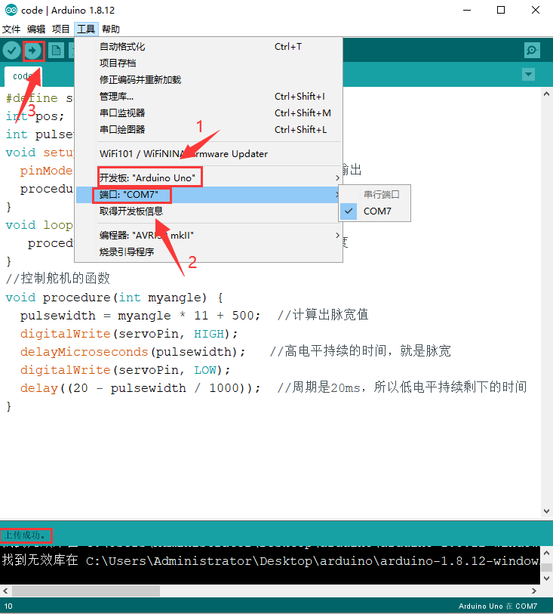
开发板连接好电脑,选择好开发板和串口,点击上传程序,程序上传成功后舵机自动转到90度的位置
(2)Mixly教程:
我们先导入KEYES智能小车 mixly库文件
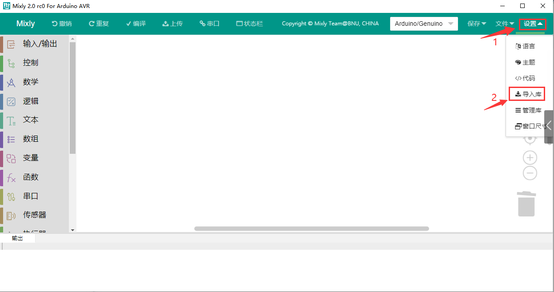
打开米思奇软件,点击设置---->导入库
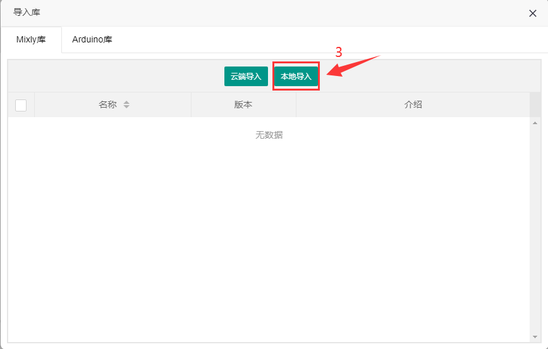
点击本地导入
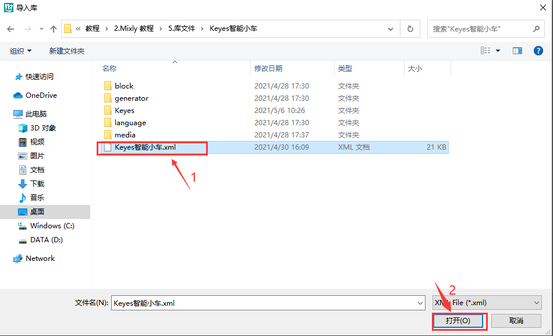
选择我们文件里提供的keyes智能小车文件,这样米思奇库文件就导入完成了。
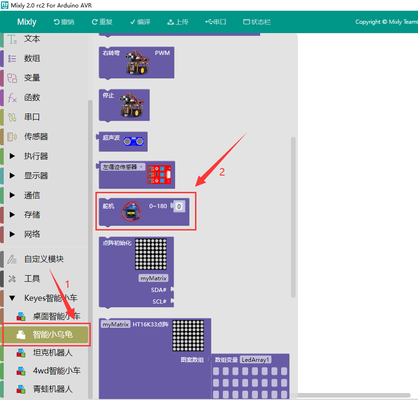
随后找到并拖出智能小乌龟栏里的舵机,设置舵机90
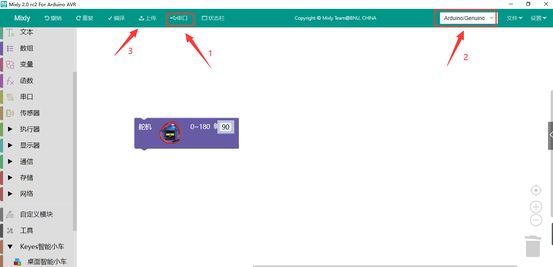
把控制板连接好电脑,选择好开发板(Arduino uno)和串口,点击上传,程序上传成功后舵机自动转到90度的位置
(3)Scartch教程:
打开资料下的舵机复位程序

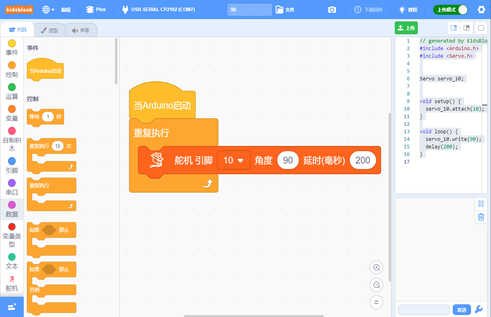
开发板连接好电脑,选择好开发板和串口,点击上传程序,程序上传成功后舵机自动转到90度的位置
舵机复位成90°后可继续往下操作
分步安装1
分步安装2(安装时需要安图所示90°朝前安装)
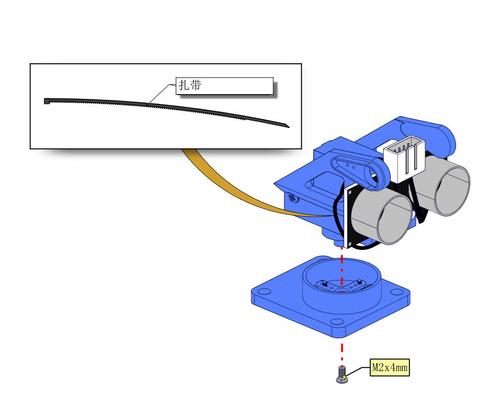
完成
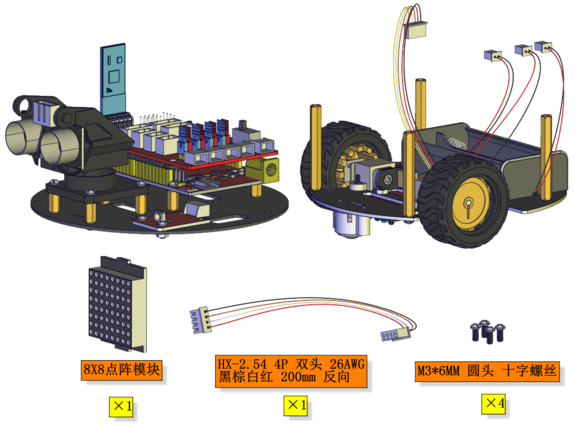
安装6
安装所需零件
安装
完成
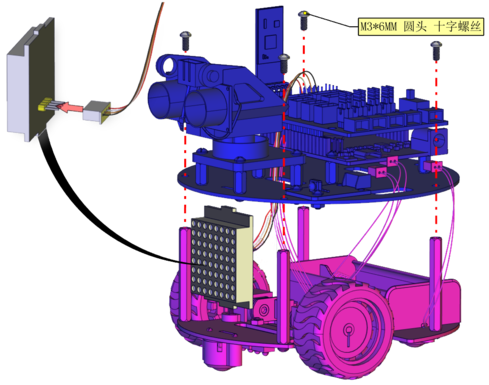
安装7
安装所需零件
安装
完成
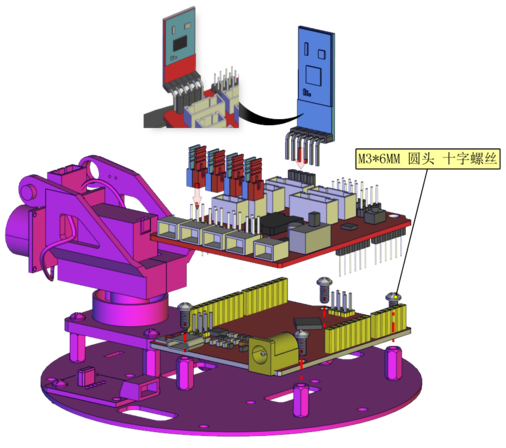
安装8
安装所需零件
安装(安装前先按图穿线)
完成
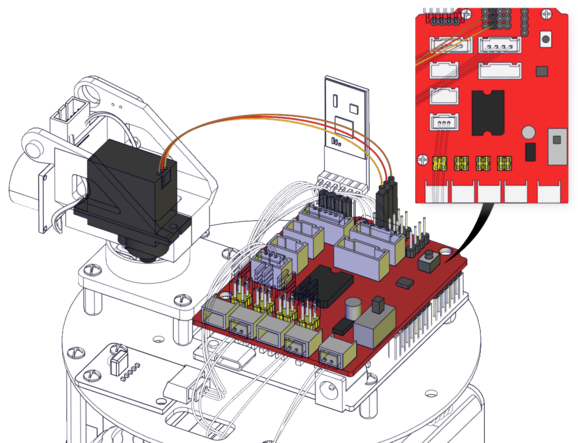
安装部分完成后进行接线
电机A接线图
电机B接线图
循迹传感器接线图
超声波接线图
点阵接线图
舵机接线图
红外接收传感器接线图
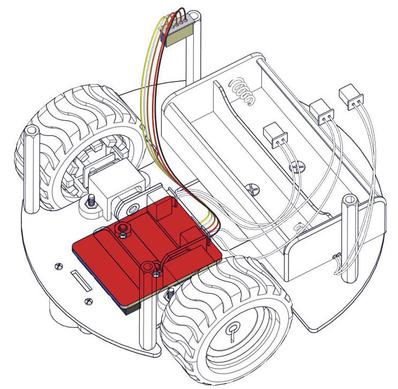
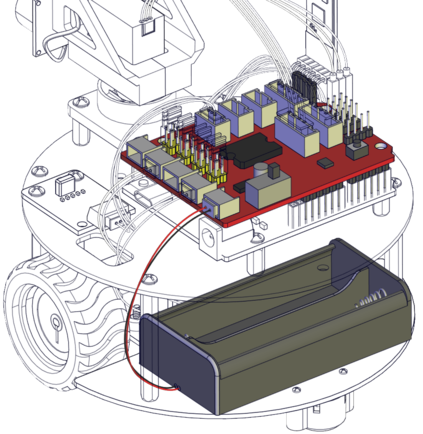
电池盒接线图
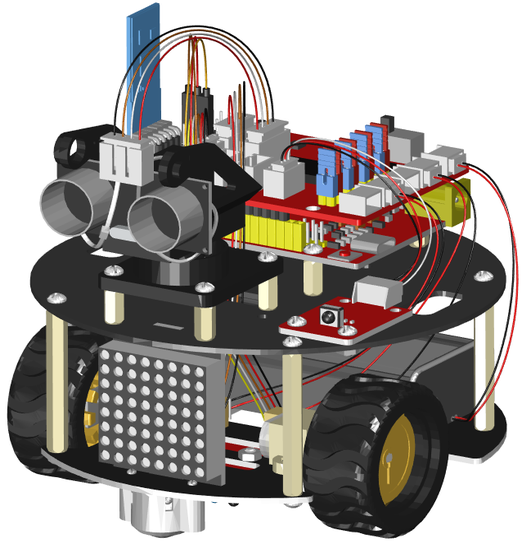
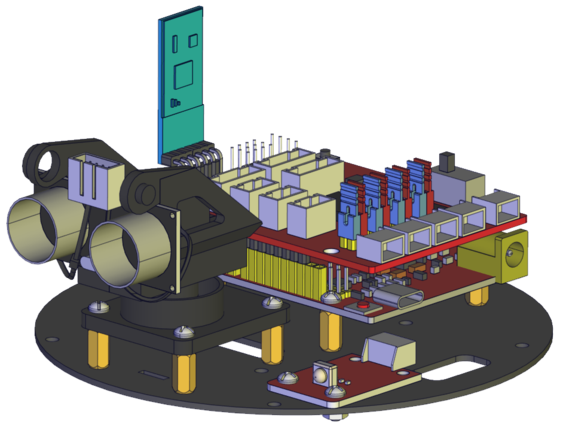
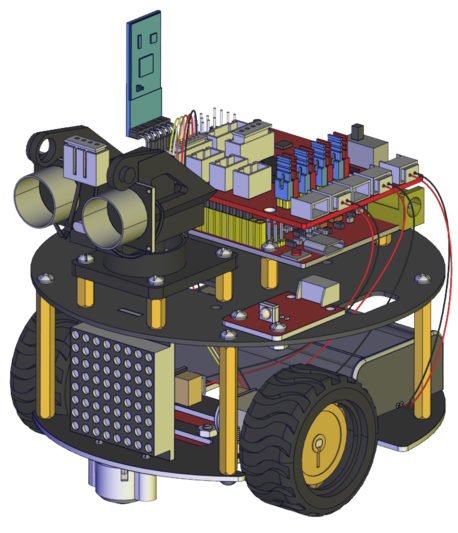
完成渲染效果图