Python#
1. Python简介#
Python是一种高层次的编程语言,以其简洁的语法和强大的功能而闻名。它支持多种编程范式,包括面向对象、命令式和函数式编程。Python因其易于学习和使用而成为初学者和专业开发者的热门选择。其丰富的标准库和第三方库使得Python能够广泛应用于数据分析、机器学习、网络开发、自动化脚本、科学计算和人工智能等领域。
Python的兼容性强,能够在多种平台上运行,提供了一个良好的跨平台开发环境。许多知名的第三方框架(如Django和Flask)和库(如NumPy和Pandas)使得Python在不同领域都有着广泛的应用。其活跃的社区也为学习者提供了丰富的学习资源和支持,使得用户能够轻松解决问题并获取最新的技术动态。
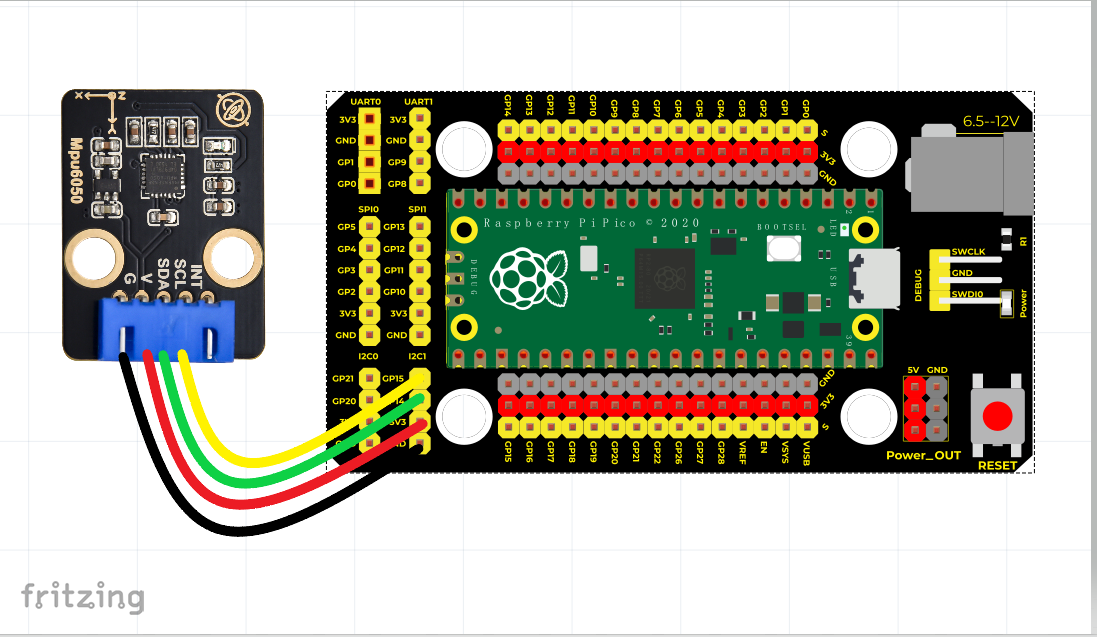
2. 接线图#
3. 测试代码#
下载资料:python
from machine import Pin
import utime
import math
import mpu6050
# MPU6050的SDA接GP14,SCL接GP15
mpu = mpu6050.MPU6050()
mpu.setSampleRate(200) # 设置采样率
mpu.setGResolution(2) # 设置g分辨率
# 均值处理
def averageMPU(count, timing_ms):
gx = 0
gy = 0
gz = 0
gxoffset = 0.07
gyoffset = -0.04
for i in range(count):
g = mpu.readData()
# offset mpu
gx += g.Gx - gxoffset
gy += g.Gy - gyoffset
gz += g.Gz
utime.sleep_ms(timing_ms)
return gx/count, gy/count, gz/count
# 循环函数
def loop():
while True:
gx, gy, gz = averageMPU(20, 5)
# calculate vector dimension
vdim = math.sqrt(gx*gx + gy*gy + gz*gz)
# get x angle
rad2degree = 180 / math.pi
angleX = rad2degree * math.asin(gx / vdim)
angleY = rad2degree * math.asin(gy / vdim)
# 获取X,Y的倾斜角度
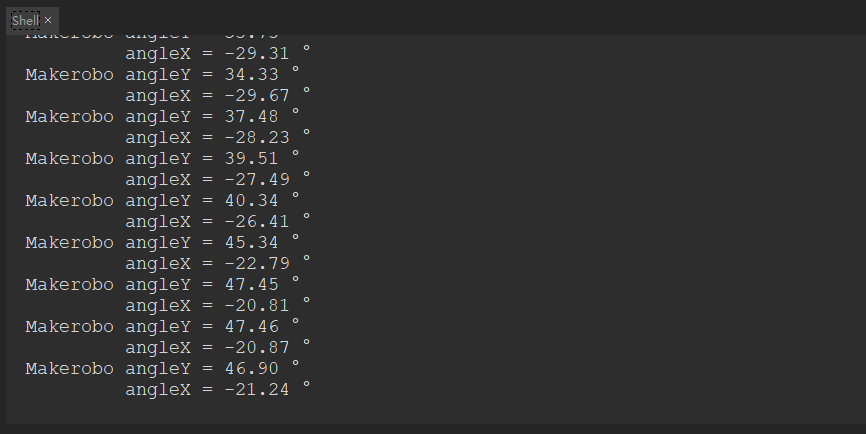
print('Makerobo angleY = {0:0.2f} °'.format(-angleY))
print(' angleX = {0:0.2f} °'.format(-angleX))
# 程序入口
if __name__ == '__main__':
loop()
4. 代码说明#
在实验中,我们需要先导入mpu6050模块,导入方法我们之前已经讲过,导入后如下图可看到:

5. 测试结果#
按照接线图接好线,上传代码并上电后,我们可以在串口监视器中看到相应的数值,如下图所示: