4.4.6 语音控制风扇系统#
4.4.6.1 简介#
夏天来了,风扇成了家里或农场里的“小救星”。但每次手动调节风速,是不是觉得有点麻烦?想象一下,只需动动嘴,风扇就乖乖听话,那该多方便!语音控制风扇,真的是懒人福音!无需动手,只需口头指令,就能轻松实现开关、调节风速等功能。
想象一下,回家一进门,喊一声类似于“打开风扇”等命令词,立刻就能感受到凉风拂面;感觉风速小,喊一声类似于“风大一点”等命令词,又能感受到凉风变大;感觉风速大了需要风速小点,喊一声类似于“风小一点”等命令词,立马能感受到凉风变小;需要外出出门时,喊一声类似于“关闭风扇”等命令词,风扇立刻就能停止。
这种便捷性,对于行动不便者或大农场主来说,更是大大提升了生活质量。

语音控制风扇系统是通过组合智能语音模块和电机模块,实现对农场里的温度进行语音智能调节。
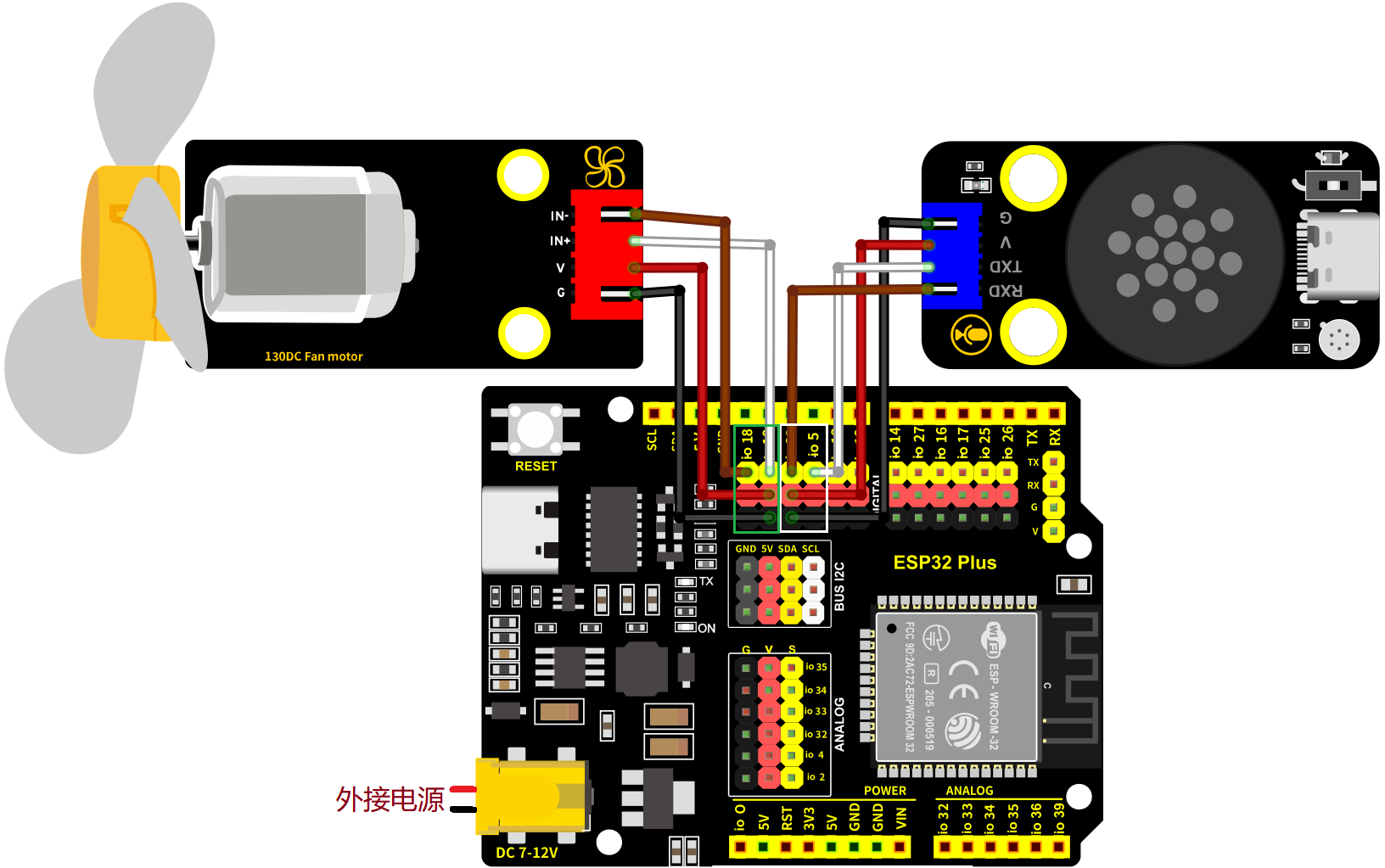
4.4.6.2 接线图#
电机模块的IN-引脚连接到io18,IN+引脚连接到io19
智能语音模块的TXD引脚连接到io5,RXD引脚连接到io23
⚠️ 特别注意:智慧农场已经组装好了,这里不需要把超声波传感器、舵机和智能语音模块拆下来又重新组装和接线,这里再次提供接线图,是为了方便您编写代码!
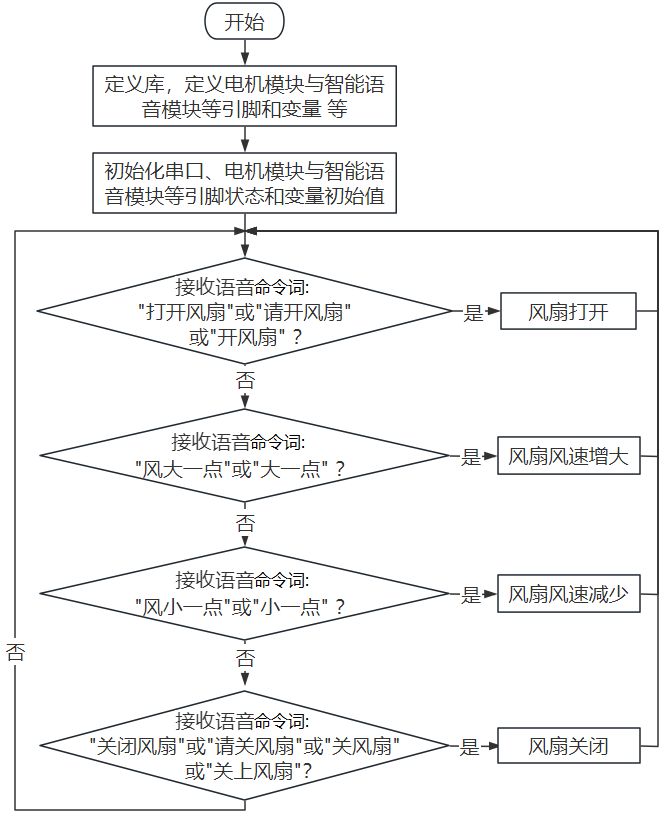
4.4.6.3 代码流程图#
4.4.6.4 实验代码#
代码文件在Arduino_代码文件夹中,代码文件为4_4_6_Voice-Control-Fan-System,如下图所示:

鼠标双击4_4_6_Voice-Control-Fan-System.ino即可在Arduino IDE中打开。
/*
* 文件名 : Voice-Control-Fan-System
* 功能 : 结合智能语音模块和电机模拟农场语音调控风扇系统
* 编译IDE:ARDUINO 2.3.6
* 作者 : https://www.keyesrobot.cn/
*/
//导入相关库文件
#include <SoftwareSerial.h>
// 定义引脚常量
const int RX_PIN = 23; // 引脚 GPIO23 为 RX
const int TX_PIN = 5; // 引脚 GPIO5 为 TX
const int MotorPin1 = 19; // (IN+)
const int MotorPin2 = 18; // (IN-)
SoftwareSerial mySerial(RX_PIN, TX_PIN); // 定义软件串口引脚(RX, TX)
// 定义变量
volatile int yuyin;
// 串口发送消息最大长度
#define UART_SEND_MAX 32
#define UART_MSG_HEAD_LEN 2
#define UART_MSG_FOOT_LEN 2
// 串口发送消息号
#define U_MSG_bozhensgshu 1
#define U_MSG_boxiaoshu 2
#define U_MSG_bobao1 3
#define U_MSG_bobao2 4
#define U_MSG_bobao3 5
#define U_MSG_bobao4 6
#define U_MSG_bobao5 7
#define U_MSG_bobao6 8
#define U_MSG_bobao7 9
#define U_MSG_bobao8 10
#define U_MSG_bobao9 11
#define U_MSG_bobao10 12
#define U_MSG_bobao11 13
#define U_MSG_bobao12 14
#define U_MSG_bobao13 15
#define U_MSG_bobao14 16
#define U_MSG_bobao15 17
#define U_MSG_bobao16 18
#define U_MSG_bobao17 19
#define U_MSG_bobao18 20
// 串口消息参数类型
typedef union {
double d_double;
int d_int;
unsigned char d_ucs[8];
char d_char;
unsigned char d_uchar;
unsigned long d_long;
short d_short;
float d_float;}uart_param_t;
// 串口发送函数实现
void _uart_send_impl(unsigned char* buff, int len) {
// TODO: 调用项目实际的串口发送函数
for(int i=0;i<len;i++){
mySerial.write (*buff++);
}
}
// 串口通信消息尾
const unsigned char g_uart_send_foot[] = {
0x55, 0xaa
};
// 十六位整数转32位整数
void _int16_to_int32(uart_param_t* param) {
if (sizeof(int) >= 4)
return;
unsigned long value = param->d_long;
unsigned long sign = (value >> 15) & 1;
unsigned long v = value;
if (sign)
v = 0xFFFF0000 | value;
uart_param_t p; p.d_long = v;
param->d_ucs[0] = p.d_ucs[0];
param->d_ucs[1] = p.d_ucs[1];
param->d_ucs[2] = p.d_ucs[2];
param->d_ucs[3] = p.d_ucs[3];
}
// 浮点数转双精度
void _float_to_double(uart_param_t* param) {
if (sizeof(int) >= 4)
return;
unsigned long value = param->d_long;
unsigned long sign = value >> 31;
unsigned long M = value & 0x007FFFFF;
unsigned long e = ((value >> 23 ) & 0xFF) - 127 + 1023;
uart_param_t p0, p1;
p1.d_long = ((sign & 1) << 31) | ((e & 0x7FF) << 20) | (M >> 3);
param->d_ucs[0] = p0.d_ucs[0];
param->d_ucs[1] = p0.d_ucs[1];
param->d_ucs[2] = p0.d_ucs[2];
param->d_ucs[3] = p0.d_ucs[3];
param->d_ucs[4] = p1.d_ucs[0];
param->d_ucs[5] = p1.d_ucs[1];
param->d_ucs[6] = p1.d_ucs[2];
param->d_ucs[7] = p1.d_ucs[3];
}
// 串口通信消息头
const unsigned char g_uart_send_head[] = {
0xaa, 0x55
};
void setup(){
Serial.begin(9600); // 硬件串口(与电脑通信)
mySerial.begin(9600); // 软件串口(与外设通信)
yuyin = 0; // 定义变量yuyin初始值为0
pinMode(MotorPin1,OUTPUT); // 设置MotorPin1(IN+)引脚为输出模式
pinMode(MotorPin2,OUTPUT); // 设置MotorPin2(IN-)引脚为输出模式
}
void loop(){
if (mySerial.available() > 0) { // 接收语音控制模块的外设数据(命令参数)
yuyin = mySerial.read(); // 将接收到的外设数据(命令参数)进行赋值
Serial.println(yuyin); // 串口打印接收到的外设数据(命令参数)
if (yuyin == 5) { // 接收到的外设数据(命令参数)为5, 打开风扇, 风速为100
yuyin = 0; // 清除识别结果
delay(2000);
analogWrite(MotorPin1, 100);
analogWrite(MotorPin2, 0);
}
if (yuyin == 7) { // 接收到的外设数据(命令参数)为7, 风大一点, 风速为200
yuyin = 0;
delay(2000);
analogWrite(MotorPin1, 200);
analogWrite(MotorPin2, 0);
}
if (yuyin == 8) { // 接收到的外设数据(命令参数)为8, 风小一点, 风速为100
yuyin = 0;
delay(2000);
analogWrite(MotorPin1, 100);
analogWrite(MotorPin2, 0);
}
if (yuyin == 6) { // 接收到的外设数据(命令参数)为6, 关闭风扇
yuyin = 0;
delay(2000);
analogWrite(MotorPin1, 0);
analogWrite(MotorPin2, 0);
}
}
}
4.4.6.5 实验结果#
按照接线图接好线,外接电源,选择好正确的开发板板型(ESP32 Dev Module)和 适当的串口端口(COMxx),然后单击按钮 上传代码。
上传代码。
上传代码成功后,对着智能语音模块上的麦克风,使用唤醒词 “你好,小智” 或 “小智小智” 来唤醒智能语音模块,同时喇叭播放回复语 “有什么可以帮到您”。
智能语音模块唤醒后,对着麦克风说:“打开风扇” 或 “请开风扇” 或 “开风扇” 等命令词时,喇叭播放对应的回复语 “已为您打开风扇”,同时风扇转动。
对着麦克风说:“风大一点” 或 “大一点” 等命令词时,喇叭播放对应的回复语 “风速已增加”,同时风扇转速加快。
对着麦克风说 “风小一点” 或 “小一点” 等命令词时,喇叭播放对应的回复语 “风速已减弱”,同时风扇转速减慢。
对着麦克风说:“关闭风扇” 或 “请关风扇” 或 “关风扇” 或 “关上风扇” 等命令词时,喇叭播放对应的回复语 “已为您关闭风扇”,同时风扇不转。