MakeCode 教程#
MakeCode 开发环境配置#
1.安装 IDE#
Micro:bit是一款无需安装IDE产品,只需要在网页上进行编程下载即可。网址:https://makecode.microbit.org/
当然如果需要离线版本,Makecode离线软件下载链接:https://makecode.microbit.org/offline-app
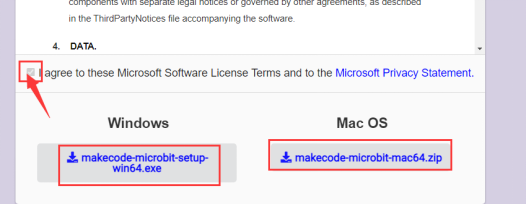
Makecode离线软件更新教程:
首先,我们打开软件,在右上角点击“设置”图案 ,然后再点击“关于”。
,然后再点击“关于”。
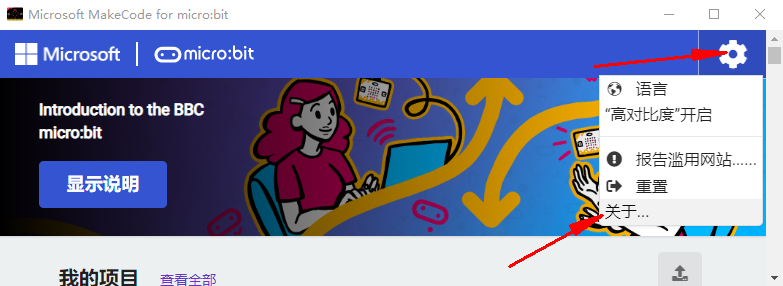
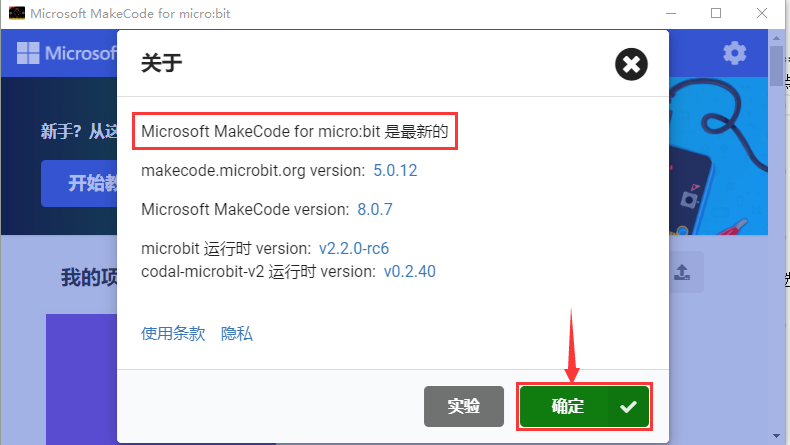
然后进入“关于”界面,点击“确定”确定是最新版本。
2.安装Micro:bit 驱动#
Micro:bit是可以免安装USB驱动的。如果你的电脑已经安装过micro:bit 驱动,就不需要再次安装micro:bit驱动。假如你是首次使用micro:bit主板,则你的电脑需要安装micro:bit驱动。如果你的电脑识别不了Micro:bit主板,则需要安装一下Micro:bit驱动,我们提供有Micro:bit 驱动文件 ,你可以进入相关文件夹中根据安装说明书进行安装。
,你可以进入相关文件夹中根据安装说明书进行安装。
下面给Micro:bit主板安装驱动。
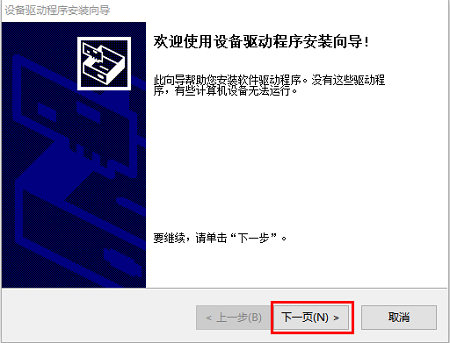
首先将Micro:bit主板用Micro USB数据线连接到电脑上,然后鼠标左键双击驱动文件,出现如下页面再点击“下一页”。
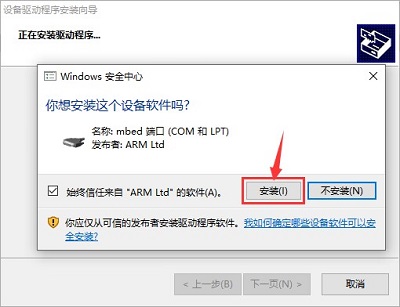
先点击“安装”,几秒种后,安装完成,再点击“完成”。这样,驱动安装完成。
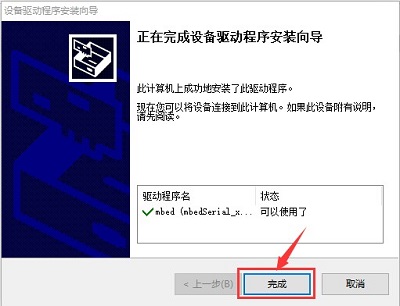
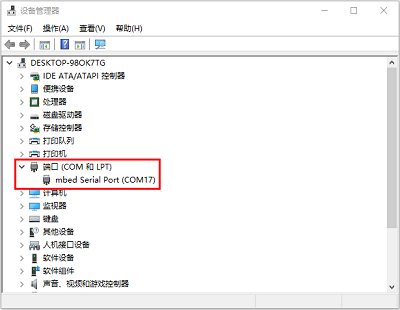
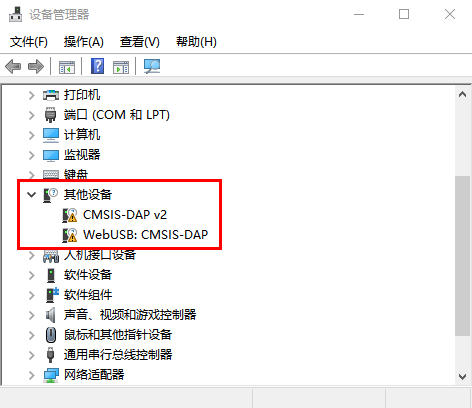
安装完成后,点击“我的电脑” —>“属性”—> “设备管理器”, 我们可以看到下图。
3.快速开始#
以下的步骤说明基于Windows操作系统,如果你使用的是其他操作系统,可以将其作为参考。
(1)代码与编程#
本节介绍如何为Micro:bit编写程序以及如何将其下载到Micro:bit主板。 Micro:bit官方网站上有非常详细的教程, 您可以参考:https://microbit.org/guide/quick/
步骤 1: 连接Micro:bit主板
通过Micro USB线将Micro:bit主板连接到电脑。


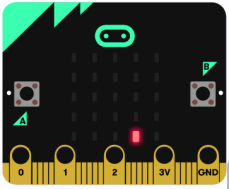
Micro:bit主板背后的红色LED点亮,表明Micro:bit主板有电了。
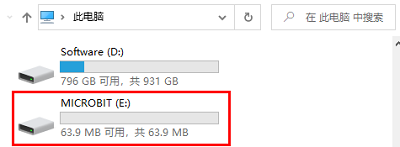
Micro:bit 将在您的电脑上显示为一个名为’MICROBIT’的驱动器。但请注意,它不是普通的USB磁盘!如下图:
步骤 2: 编写程序
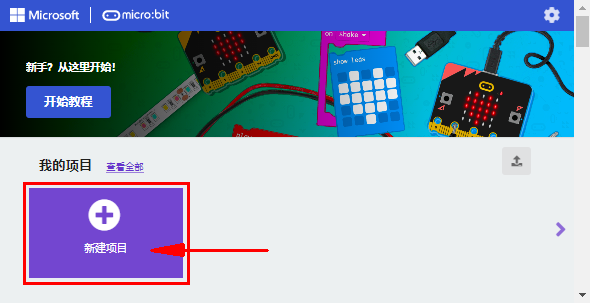
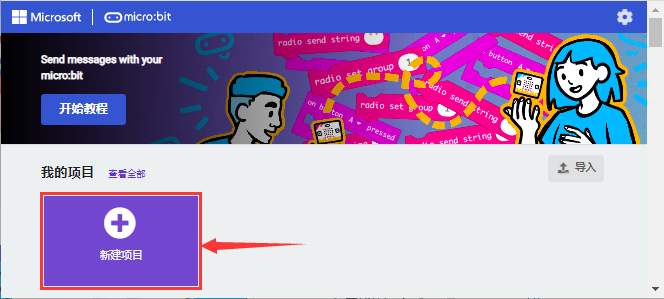
在浏览器中访问链接:https://makecode.microbit.org/ ,然后单击“新建项目”,出现“创建项目”对话框,在对话框中输入“心跳”,单击“创建”并开始编程。
(以下是以Google Chrome为例,其他浏览器类似)


①使用MakeCode编辑器,写一个Micro:bit代码。 例如,从模块区拖放一些指令方块放入代码编辑区。
下一节将进一步介绍MakeCode。

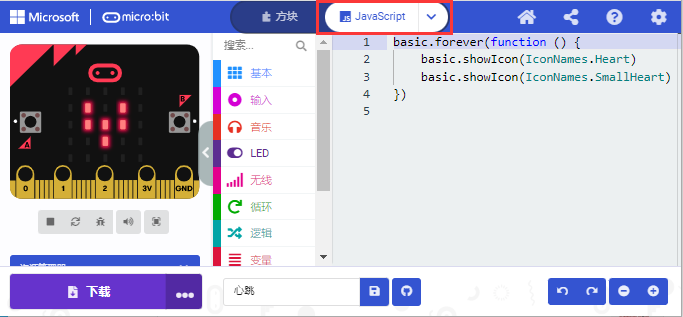
②点击“JS JavaScript”,你可以看到对应的JavaScript语言代码程序,如下图:
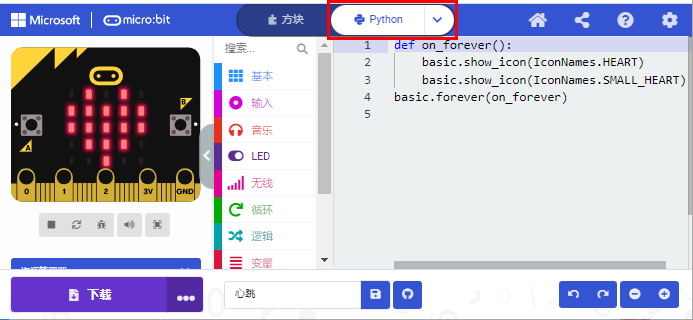
③你还可以点击“JS JavaScript ”,再点击下拉按钮选择“Python”,你还可以看到对应的Python语言代码程序,如下图:
步骤 3: 下载代码
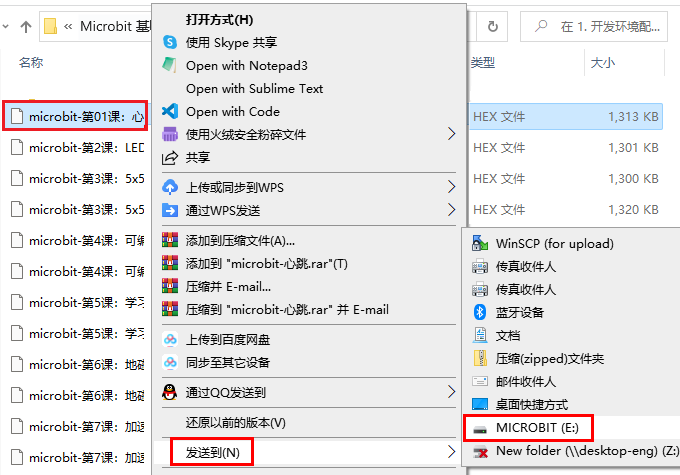
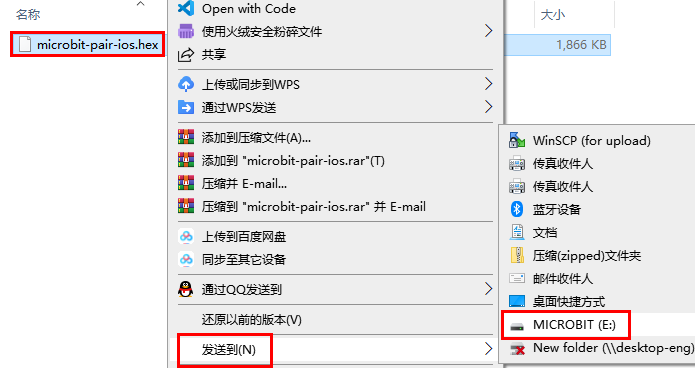
单击编辑器中的“下载”按钮。 这将下载一个“hex”文件,该文件是Micro:bit主板可以读取的紧凑程序格式。 十六进制文件下载后,将其复制到你的Micro:bit主板,就像将文件复制到USB驱动器一样。 在Windows上,你还可以右键单击并选择“发送到→MICROBIT(E)”将“hex”文件拷贝到Micro:bit主板。
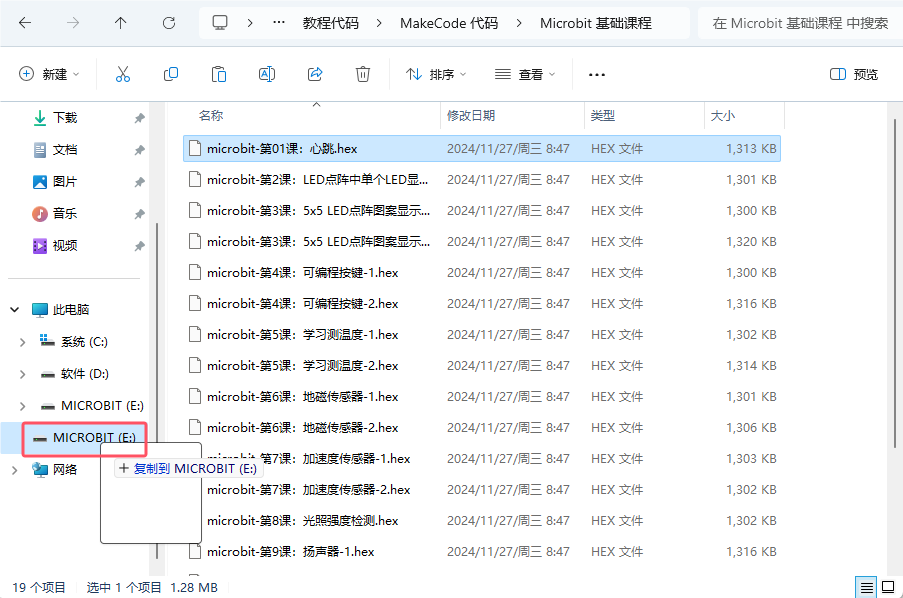
也可以将“.hex”文件直接拖入MICROBIT(E)磁盘中。
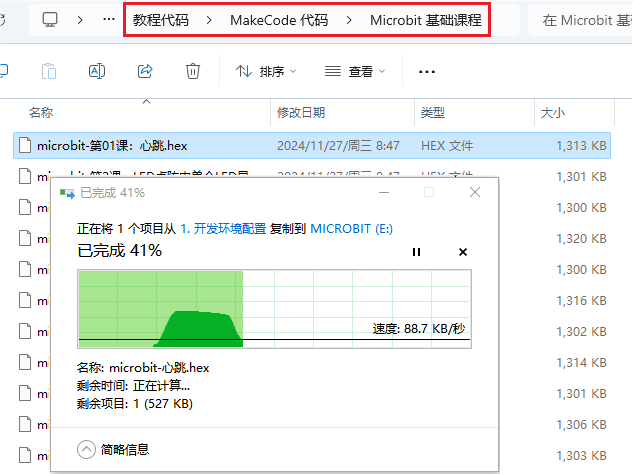
将下载好的“hex”文件拷贝到Micro:bit主板过程中,Micro:bit主板背面的黄色信号灯会闪烁,当拷贝完成后黄色信号灯停止闪烁,保持长亮。
步骤: 运行程序
代码程序上传Micro: bit 主板后,通过Micro USB线或外接电源给Micro: bit主板供电,Micro: bit 主板上的5 x 5 LED点阵显示心跳的图案。

micro USB线供电

外接电源供电(3.3V)
每次编程时,MICROBIT驱动器都会自动弹出并返回,但是你的hex文件将会消失。 Micro: bit主板只能接收.hex文件,不会存储任何其他文件!
步骤5:掌握
本小节向你展示了如何开始使用Micro:bit,但是除了MakeCode之外,您还可以使用Python语言和基于文本的JavaScript语言来编写Micro:bit。转到:https://microbit.org/code/ 查看不同的语言,或查看:https://microbit.org/projects/ ,了解你可能想要尝试的一些内容。
(2)Makecode#
在Google Chrome访问链接:https://makecode.microbit.org/ , 打开MakeCode在线版本。
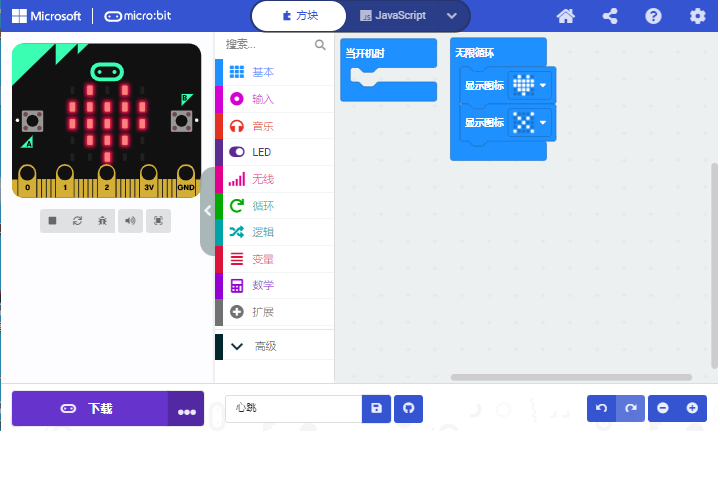
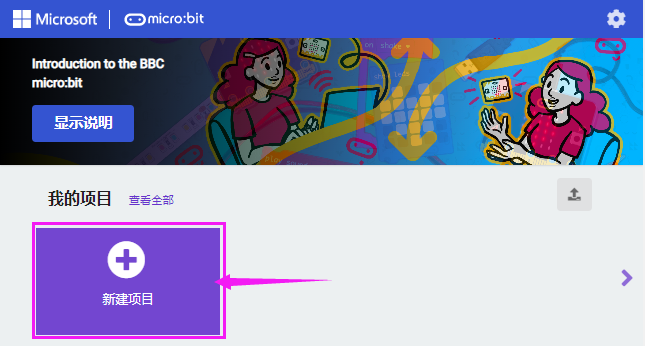
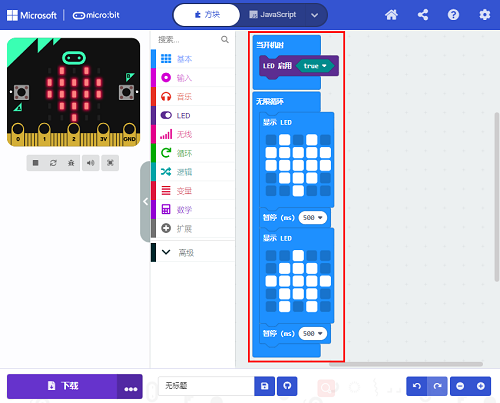
点击 “新建项目”,出现“创建项目”对话框,在对话框中输入“心跳”,单击“创建”进入MakeCode 编译器,MakeCode 编译器如下:

在代码编辑区中,有两个固定的指令方块“当开机时”和“无限循环”。
上电或复位后,“当开机时”指令方块中的代码将仅执行一次;并且“无限循环”指令方块中的代码将循环执行。
(3)快速下载#
使用MakeCode的浏览器版本下载编写好的代码程序可能需要更多步骤。 但是,如果您将Google Chrome 用于Android,ChromeOS,Linux,macOS和Windows 10系统,则可以实现快速下载功能。
在这里,我们使用Chrome的webUSB功能,该功能允许网页访问您的Micro USB硬件设备。 我们将按照以下步骤完成Micro:bit设备与网页的连接和配对。
配对装置:
用Micro USB线连接电脑和Micro: bit主板。
单击“下载”后面的“…”,然后单击“连接设备”。

然后继续单击“下一步”按钮。

再继续单击“下一步”按钮。

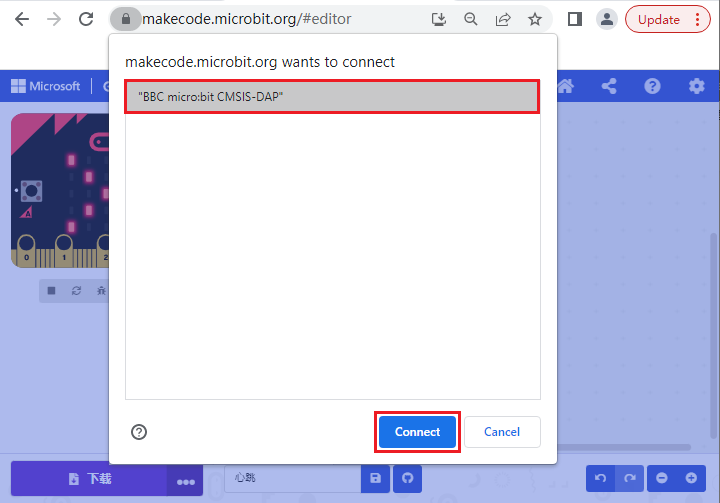
在弹出窗口中选中对应的“设备”,然后单击“连接”按钮。 如果弹出窗口中没有设备,请参考以下内容:https://makecode.microbit.org/device/usb/webusb/troubleshoot。
当然,如果你不想点击链接进入相关页面中查看,你也可以在“相关其他资料”教程中直接阅读“用WebUSB排除下载过程中的故障”。
如果你的Micro:bit主板出现问题是需要更新Micro:bit的固件,在“相关其他资料”教程中的“如何更新micro:bit主板的固件”介绍了如何更新Micro:bit的固件,其内容来自:https://microbit.org/guide/firmware/
单击“完成”,设备连接成功。

程序下载:
设备连接成功后,单击“下载”按钮,程序将直接下载到Micro:bit主板。
注意:有的系统不支持快速下载方式,比如在电脑的设备管理器中可以看到在线驱动CMSIS-DAP安装不成功就不支持快速下载;需要选择其它程序上传方式。比如:右键单击并选择“发送到→MICROBIT(E)”将“hex”文件拷贝到Micro:bit主板。 等程序上传方式。
4.MakeCode扩展库:#
为了轻松使用Microbit4自由度机械手臂 ,我们为Micro:bit 4自由度机械手臂制作了一个MakeCode扩展库。
(1)添加4自由度机械手臂Micro:bit 扩展库:
您可以通过以下方法添加4自由度机械手臂Micro:bit扩展库文件。
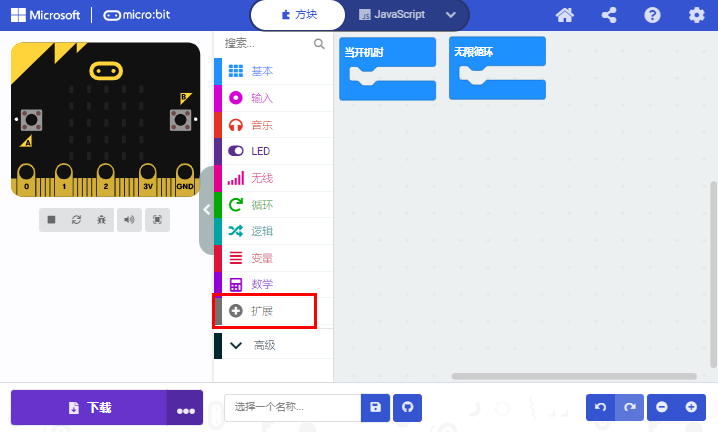
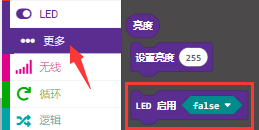
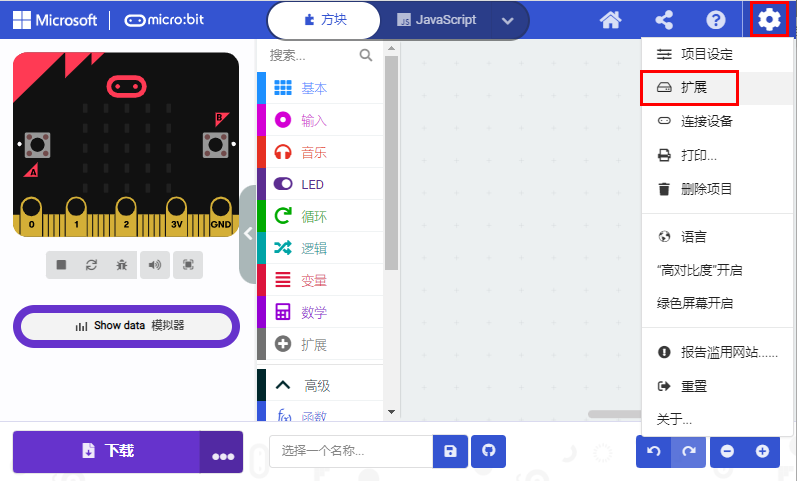
打开MakeCode,先点击右上角的齿轮图标 (设置),再点击“扩展”。
(设置),再点击“扩展”。
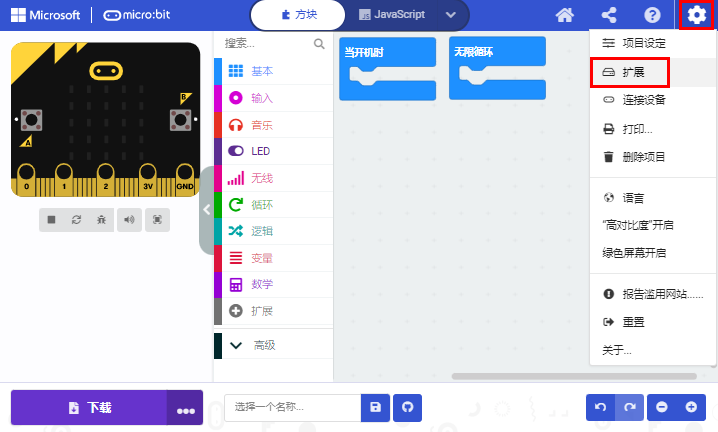
或者单击“高级”上的“扩展”。
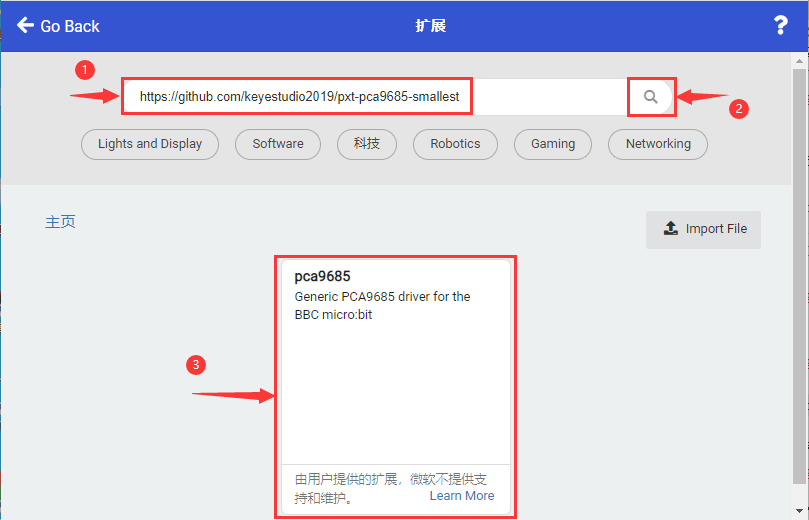
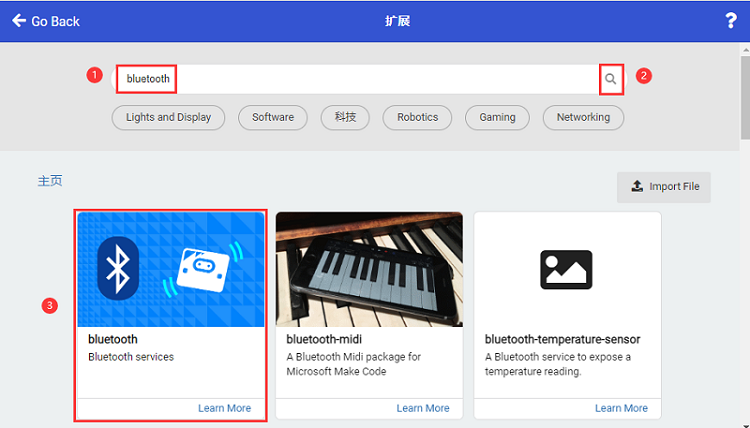
在搜索框中输入链接:https://github.com/keyestudio2019/pxt-pca9685-smallest,然后单击搜索。
单击搜索结果pca9685以下载并安装。 该过程可能需要几秒钟。
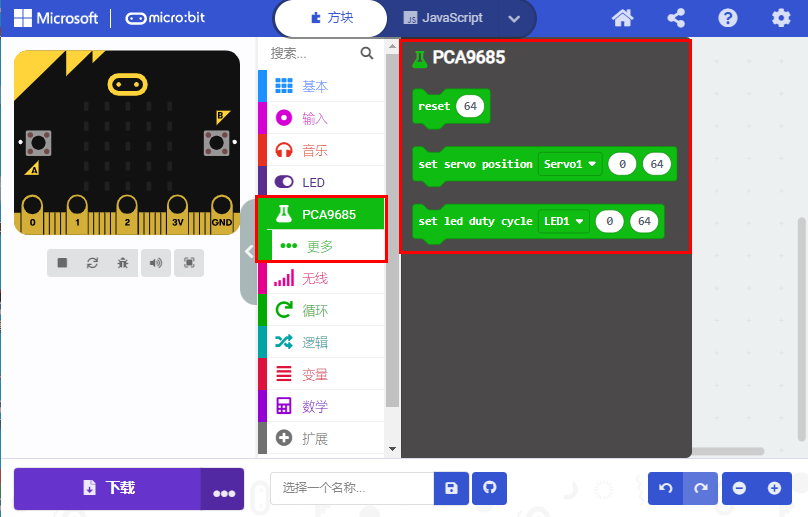
安装完成后,你可以在左侧找到pca9685的扩展库。
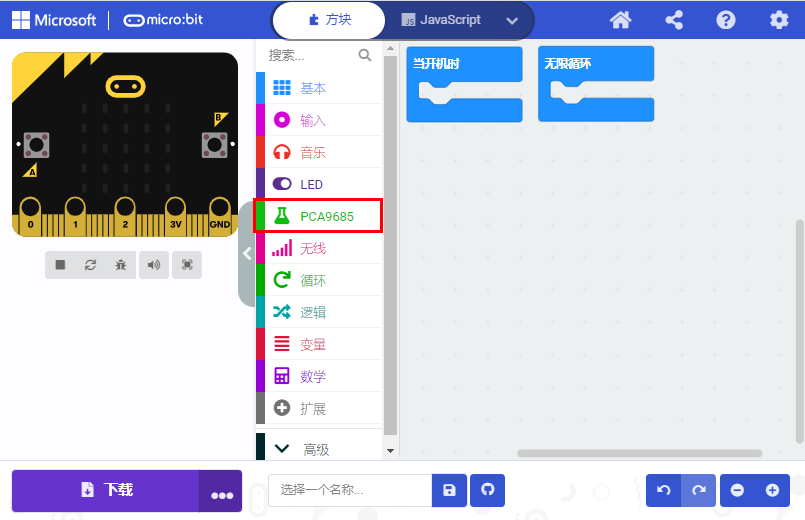
注意:添加到项目中的扩展库仅对该项目有效,而不会出现在其他项目中。 因此,当你创建新项目代码时,需要再次添加pca9685扩展库。
(2)更新或删除pca9685扩展库:
如果您需要更新或删除pca9685扩展库文件,请按照以下说明进行操作。
点击 “Js JavaScript” 按钮切换到文本代码。

点击左边的“资源管理器”.
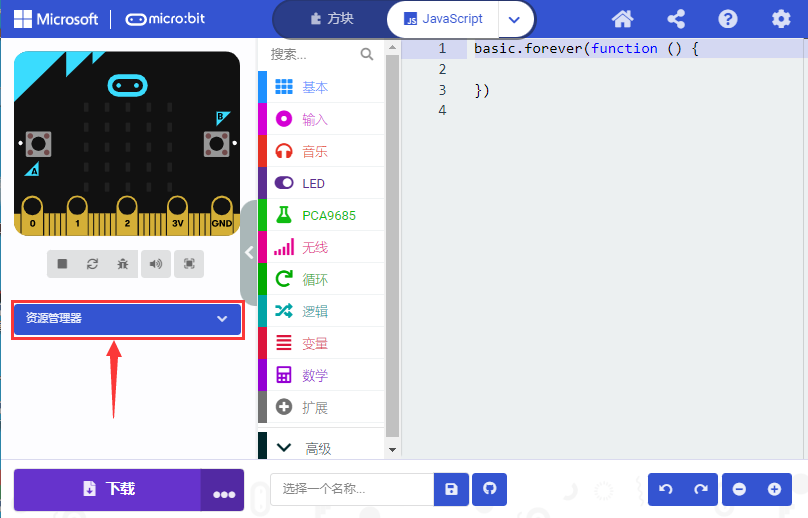
在扩展列表中找到扩展库文件。单击垃圾箱图标以删除pca9685扩展库文件。单击刷新图标以更新pca9685扩展库文件。

5.导入代码方法:#
我们为每个项目提供十六进制代码文件(项目文件)。十六进制代码文件包含项目的所有内容,可以直接导入,你也可以手动拖动代码块来完成每个项目的代码程序。如果选择通过手动拖动代码块来完成项目代码,则可能需要添加必要的扩展库。
对于简单项目,建议通过拖动代码块来完成项目。
对于复杂的项目,建议通过导入我们提供的十六进制代码文件来完成项目.
接下来,我们以“ 心跳”项目为例,介绍如何加载代码。
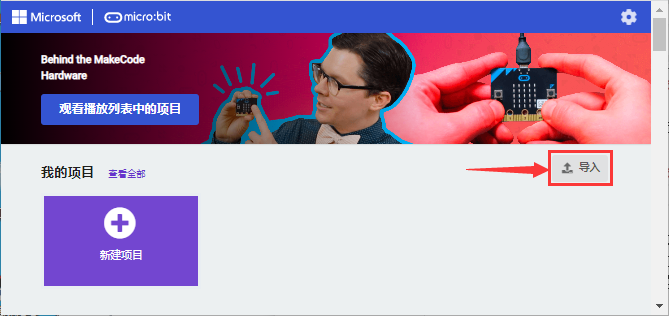
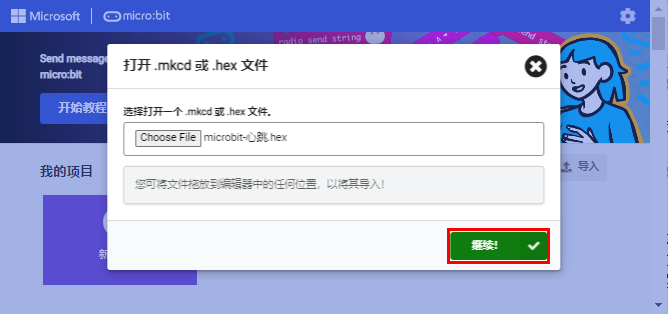
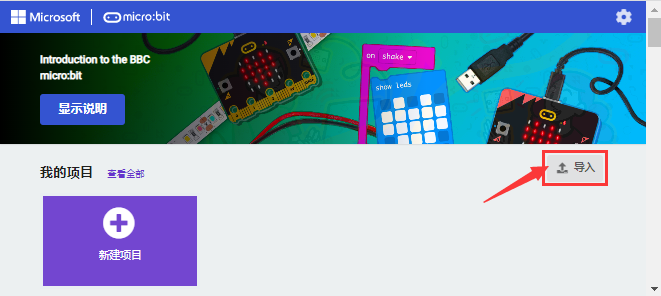
打开Web版本Makecode或离线版本Makecode,单击“导入”。
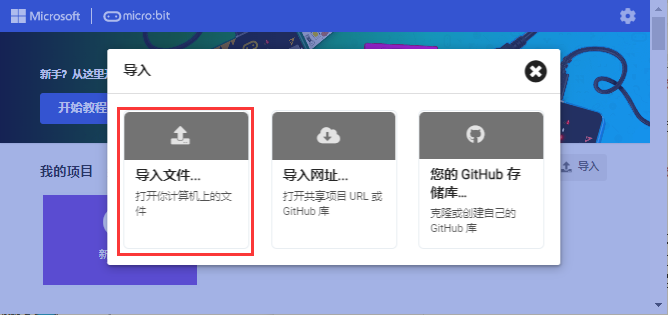
在弹出的对话框中,单击“导入文件”。
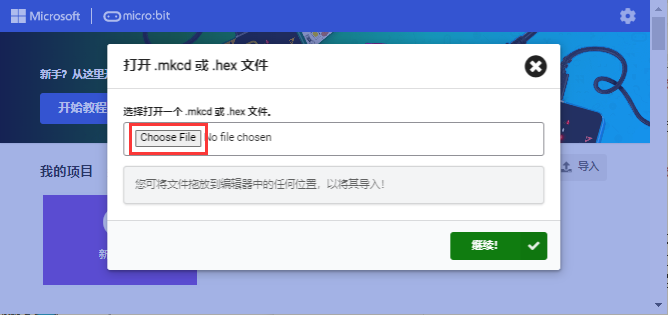
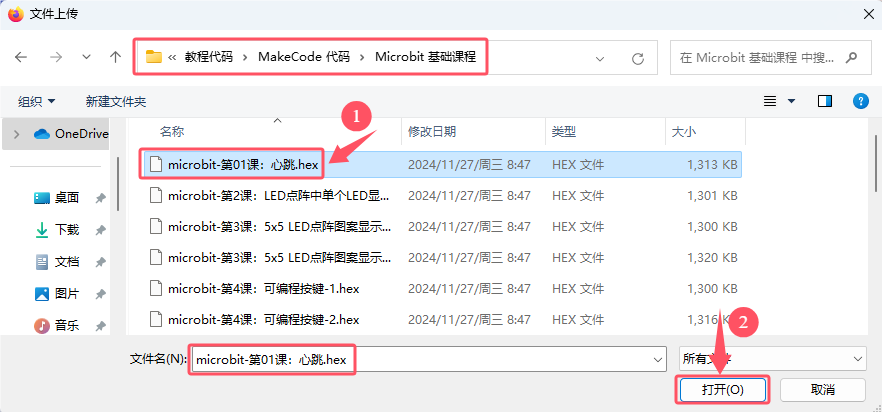
选择文件“ …\教程代码+Python库文件\教程代码\MakeCode 代码\Microbit 基础课程\microbit-第01课:心跳.hex”。 然后点击“继续!√”
除了上述将提供的项目代码程序文件直接导入到Makecode编译器中的方法之外,也可以将我们提供的项目代码程序文件直接拖入到Makecode编译器中的代码编辑区,如下图所示:
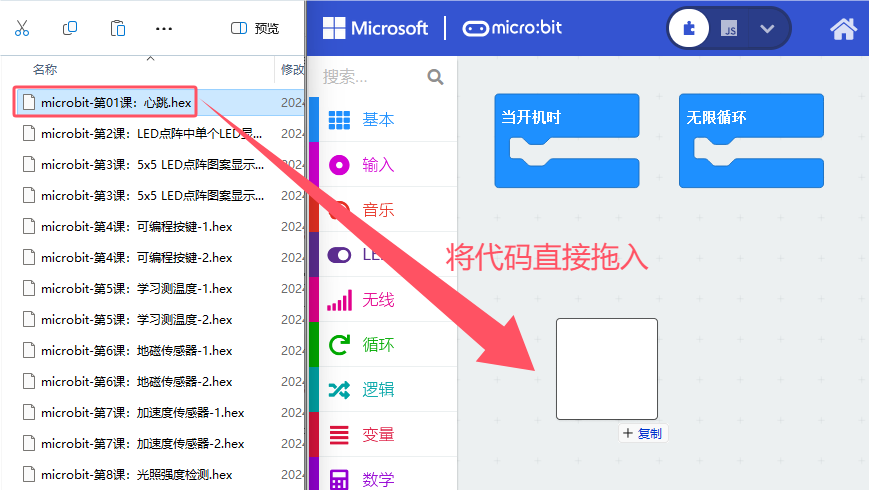
几秒钟后,项目成功加载。
注意:如果你的电脑系统是Windows7/8而不是Windows 10,则在Google Chrome中是无法进行设备配对,从而读取不了一些传感器/模块的数字信号或模拟信号,可是又需要读取相应的传感器/模块的数字信号或模拟信号,那怎么办呢?这里就可以使用CoolTerm软件来读取串口数据的,下面是CoolTerm安装方法。
6.CoolTerm软件安装方法:#
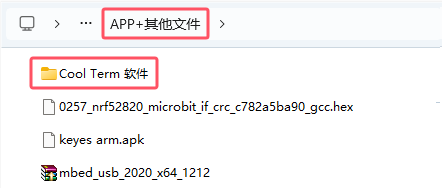
这里需要安装CoolTerm程序软件,CoolTerm程序软件是用来在下面的一些实验中读取串口通讯的,这里我们提供了CoolTerm程序软件的下载链接:https://freeware.the-meiers.org/
(提醒:如果下载网络不好,可以使用我们提供的,在对应的文件夹中提供有CoolTerm软件)
(1)现在,让我们来安装CoolTerm程序软件,这里我们是以PC Windows系统为例,选择下载安装CoolTerm Win,下载后解压并打开。(Mac系统和 Linux系统也类似)

(2)左键双击程序文件 。(注意:必须保证micro:bit驱动已安装和micro:bit主板连接到电脑上)
。(注意:必须保证micro:bit驱动已安装和micro:bit主板连接到电脑上)
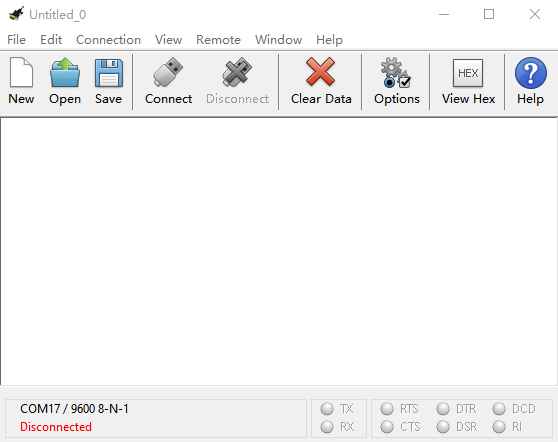
工具栏上每个按钮的功能如下所示:
|
打开一个新的终端机 |
|---|---|
|
打开保存好的连接 |
|
保存 |
|
打开串行连接 |
|
关闭串行连接 |
|
清除接收到的数据 |
|
打开“连接选项”对话框 |
|
以十六进制格式显示终端数据 |
|
帮助 |









Microbit 基础课程#
第01课 心跳#
Micro:bit 基础课程是使用Micro:bit主板自带的传感器模块和LED点阵。

1.实验说明:
首先先来练习一个不需要其他辅助元件,只需要一块Micro:bit主板,一根Micro USB数据线与一台计算机的简单实验,让Micro:bit主板上的点阵显示“心跳”,这是一个让Micro:bit主板和计算机通信的实验,这也是一个入门实验,希望可以带领大家进入Micro:bit的魔幻世界。
2.准备:
(1)通过Micro USB线连接Micro:bit主板和电脑。
(2)打开离线版本或Web版本的MakeCode。
如果是选择通过导入Hex文件来加载项目,请单击“导入”。
如果要一一拖动代码块,请单击“新建项目”。
3.实验代码:
可以直接加载我们提供的程序,也可以自己通过拖动代码块来编写代码程序,操作步骤如下:
(1)寻找代码块

(2)完整的代码程序

4.实验结果:
按照之前的方式将代码下载到Micro:bit主板,Micro USB数据线不要拔下来,利用Micro USB数据线上电,Micro:bit主板上的LED点阵屏切换显示“❤”图案和“ ”图案,循环进行。
”图案,循环进行。

如果存在下载问题,请断开Micro USB线和Micro:bit主板,然后重新连接它们并重新打开MakeCode编辑器,以尝试再次下载。
第02课 LED点阵中单个LED显示#

1.实验说明:
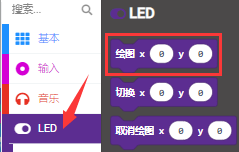
Micro:bit主板的LED点阵共由25个发光二极管组成,5个一组,分别对应X和Y方向,形成一个5×5的矩阵,且每个发光二极管是放置在行线(X)和列线(Y)的交叉点上,我们可以通过设置坐标点来实现对25个LED中某一个LED的控制。例如,想要LED点阵中第1行第1个LED点亮,可以设置坐标点为(0,0);第1行第3个LED点亮,可以设置坐标点为(2,0);第1列第5个LED点亮,可以设置坐标点为(0,4);第3列第2个LED点亮,可以设置坐标点为(2,1),依此类推。

2.准备:
(1)通过Micro USB线连接Micro:bit主板和电脑。
(2)打开离线版本或Web版本的MakeCode。
如果是选择通过导入Hex文件来加载项目,请单击“导入”。
如果要一一拖动代码块,请单击“新建项目”。
3.实验代码:
可以直接加载我们提供的程序,也可以自己通过拖动代码块来编写代码程序,操作步骤如下:
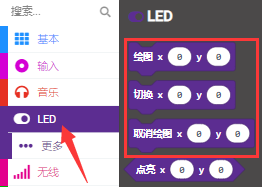
(1)寻找代码块

(2)完整的代码程序:

4.实验结果:
按照之前的方式将代码下载到Micro:bit主板,Micro USB数据线不要拔下来,利用Micro USB数据线上电,我们就可以看到切换坐标点(1,0)的LED的亮灭状态,持续0.5s,再次切换坐标点(1,0)的LED的亮灭状态,持续0.5s;点亮坐标点(3,4)的LED,持续0.5s,熄灭坐标点(3,4)的LED,持续0.5s。循环进行。

第03课 5 x 5 LED点阵图案显示#
1.实验说明:
点阵在我们生活中很常见,很多都有用到它,比如LED广告显示屏,电梯显示楼层,公交车报站等等。
Micro:bit主板的LED点阵共由25个发光二极管组成,上一课我们已经讲过通过设置坐标点来实现对LED点阵的25个LED中的某个LED的控制,这样可以通过设置多个坐标点控制多个LED的亮灭使得LED点阵能够显示图案、数字、字符串。我们也可以在特定代码中通过点击 LED点阵的灰白色小正方形点亮 LED点阵对应的LED来实现LED点阵显示图案、数字、字符串。除了上述方法还可以使用自定义图案使LED点阵显示图案。
2.准备:
(1)通过Micro USB线连接Micro:bit主板和电脑。
(2)打开离线版本或Web版本的MakeCode。
如果是选择通过导入Hex文件来加载项目,请单击“导入”。
如果要一一拖动代码块,请单击“新建项目”。
3.实验程序1:
可以直接加载我们提供的程序,也可以自己通过拖动代码块来编写代码程序,操作步骤如下:
(1)寻找代码块
(2)完整的代码程序:

4.实验结果1:
按照之前的方式将代码1下载到Micro:bit主板,Micro USB数据线不要拔下来,利用Micro USB数据线上电,我们就可以看到Micro:bit主板的5×5 LED点阵显示“向下”图案 。
。
5.实验程序2:
可以直接加载我们提供的程序,也可以自己通过拖动代码块来编写代码程序,操作步骤如下:
(1)寻找代码块


(2)完整的代码程序

6.实验结果2:
用同样的方法将代码2下载到Micro:bit主板,Micro USB数据线不要拔下来,利用Micro USB数据线上电,我们就可以看到Micro:bit主板的5×5 LED点阵开始显示数字1、2、3、4、5,然后循环显示“向下”图案 、字符串“Hello!”、“心”图案
、字符串“Hello!”、“心”图案 、“东北”方向图案
、“东北”方向图案 、“东南”方向图案
、“东南”方向图案 、“西南”方向图案
、“西南”方向图案 和“西北”方向图案
和“西北”方向图案 。
。
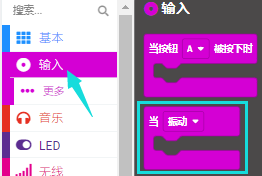
第04课 可编程按键#
1.实验说明:

按键可以控制电路的通断,把按键接入电路中,不按下按键的时候电路是断开的,一按下按键电路就通啦,但是松开之后就又断了。可是为什么按下才通电呢?这得从按键的内部构造说起。没按下之前,电流从按键的一端过不去另一端,按键的两端就像两座山,中间隔着一条河,我们在这座山过不去另一座山;按下的时候,按键内部的金属片把两边连接起来让电流通过,就像搭了一座桥,把两座山连接起来。
按键内部结构如图: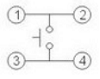 ,未按下按键之前,1、2就是导通的,3、4也是导通的,但是1、3或1、4或2、3或2、4是断开(不通)的;只有按下按键时,1、3或1、4或2、3或2、4才是导通的。
Micro:bit主板有三个按键,反面的是复位按钮,正面的是两个可编程按键,通过对两个可编程按键组合可以有三种组合,作为输入元件。我们结合上节课的LED点阵,一起来学习按键吧。我们做一个按键三连,分别按A、B和AB同时按,对应显示屏分别显示A、B和AB。
,未按下按键之前,1、2就是导通的,3、4也是导通的,但是1、3或1、4或2、3或2、4是断开(不通)的;只有按下按键时,1、3或1、4或2、3或2、4才是导通的。
Micro:bit主板有三个按键,反面的是复位按钮,正面的是两个可编程按键,通过对两个可编程按键组合可以有三种组合,作为输入元件。我们结合上节课的LED点阵,一起来学习按键吧。我们做一个按键三连,分别按A、B和AB同时按,对应显示屏分别显示A、B和AB。
2.准备:
(1)通过Micro USB线连接Micro:bit主板和电脑。
(2)打开离线版本或Web版本的MakeCode。
如果是选择通过导入Hex文件来加载项目,请单击“导入”。
如果要一一拖动代码块,请单击“新建项目”。
3.实验程序1:
按下Micro:bit主板上的按键A,按键B和按键A+B,让Micro:bit上LED点阵显示字符串。
可以直接加载我们提供的程序,也可以自己通过拖动程序块来编写程序程序,操作步骤如下:
(1)寻找代码块


(2)完整的程序程序

4.实验结果1:
按照之前的方式将程序1下载到Micro:bit主板,Micro USB数据线不要拔下来,利用Micro USB数据线上电,按下Micro:bit主板上按键A,我们可以看到5×5 LED点阵显示字符“A”;按下Micro:bit主板上按键B,我们可以看到5×5 LED点阵显示字符“B”,同时按下Micro:bit主板上按键A+B,我们就可以看到5×5 LED点阵显示字符“AB”。
5.实验程序2:
按下Micro:bit主板上按键A和按键B,对应的增加和减少条形图高度,表现为LED点阵亮的行数对应的增加和减少。
可以直接加载我们提供的程序,也可以自己通过拖动代码块来编写代码程序,操作步骤如下:
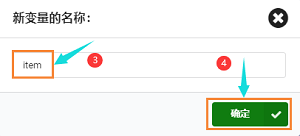
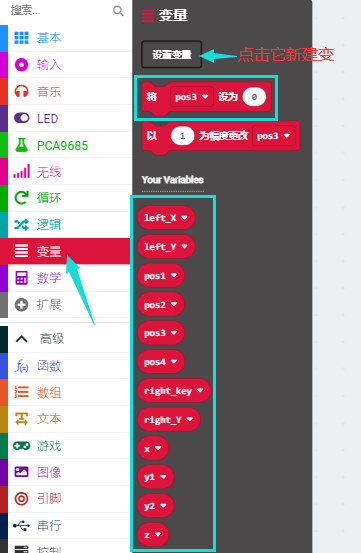
(1)创建变量item
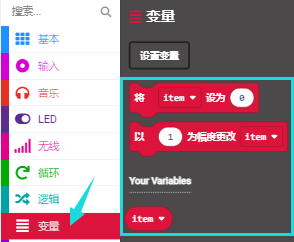
(2)寻找代码块


(3)完整的代码程序

6.实验结果2:
用同样的方式将程序2下载到Micro:bit主板,Micro USB数据线不要拔下来,利用Micro USB数据线上电,按下Micro:bit主板主板上按键A,条形图高度值增加5,表现为LED点阵亮的行数增加;按下按键B,减少条形图高度,表现为LED点阵亮的行数减少。
第05课 学习测温度#
1.实验说明:
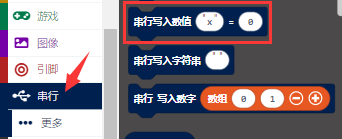
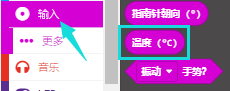
Micro:bit主板实际上并不带温度传感器,而是采用nRF52833芯片内置的温度传感器进行温度检测,所以检测的温度更接近芯片的温度,可能与周围环境温度存在一定的误差。在这一课程中,我们先利用该传感器测试当前环境中的温度,并将测试结果在显示数据(设备)中显示,再通过设置该传感器检测的温度范围来控制LED点阵显示不同的图案。
注意:Micro:bit主板的温度传感器在这里:

2.准备:
(1)通过Micro USB线连接Micro:bit主板和电脑。
(2)打开离线版本或Web版本的MakeCode。
如果是选择通过导入Hex文件来加载项目,请单击“导入”。
如果要一一拖动代码块,请单击“新建项目”。
3.实验程序1:
Micro:bit检测温度
可以直接加载我们提供的程序,也可以自己通过拖动程序块来编写程序程序,操作步骤如下:
(1)寻找代码块

(2)完整代码程序

4.实验结果1:
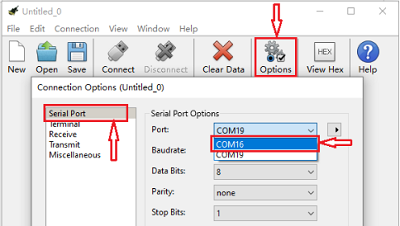
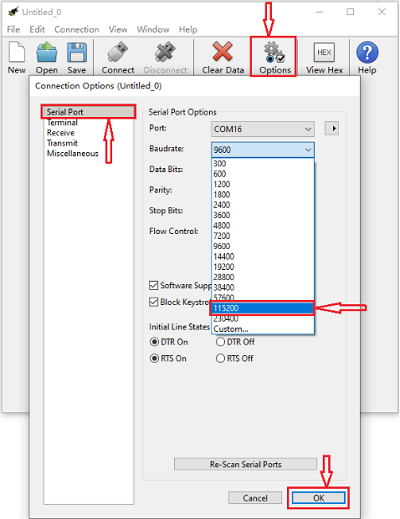
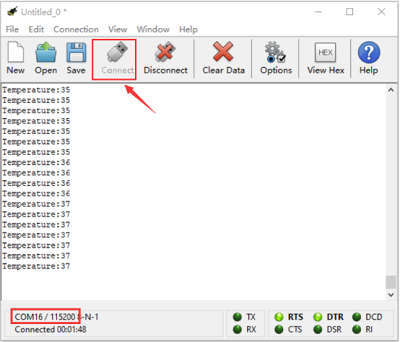
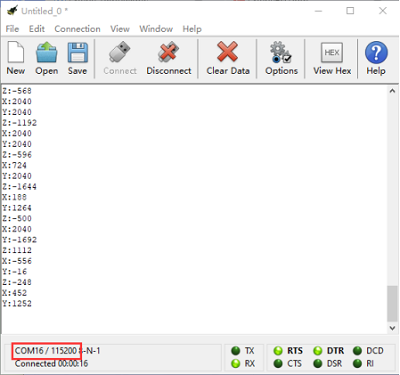
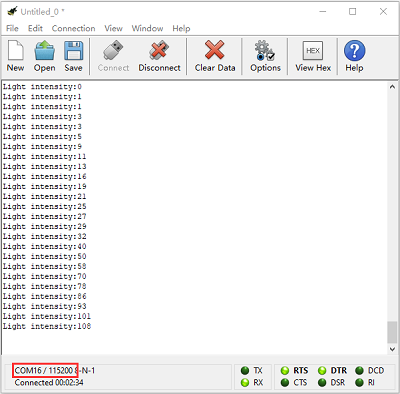
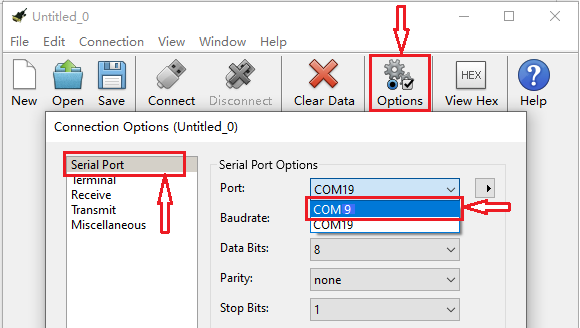
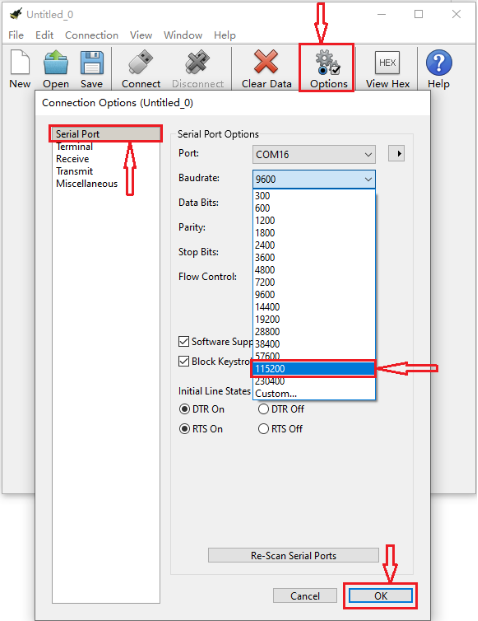
按照之前的方式将程序1下载至Micro: bit主板,Micro USB数据线不要拔下来,利用Micro USB数据线上电。 打开CoolTerm 软件,点击Options,选择串行Port,设置COM口和波特率,波特率设置为115200(经过测试,Micro:bit的USB串口通讯波特率是115200),点击OK后,最后点击Connect。CoolTerm的串口监视器显示当前环境中的温度值,如下图:
5.实验程序2:
通过温度控制Micro:bit主板上点阵显示不同图案(注意:程序中的温度值可以根据当地环境适当的调整)
可以直接加载我们提供的程序,也可以自己通过拖动程序块来编写程序程序,操作步骤如下:(这里设置的温度值可以根据实际情况重新设置)
(1)寻找代码块

(2)完整的代码程序

6.实验结果2:
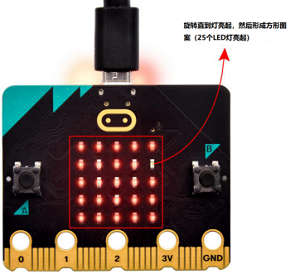
按照之前的方式将程序2下载到Micro:bit主板,Micro USB数据线不要拔下来,利用Micro USB数据线上电,外界环境中的温度小于35℃时,Micro:bit主板的5×5LED点阵中显示图案 ,用手按住Micro:bit主板的温度传感器,温度大于等于35℃时,5×5LED点阵中显示图案
,用手按住Micro:bit主板的温度传感器,温度大于等于35℃时,5×5LED点阵中显示图案 。
。
第06课 地磁传感器#

1.实验说明:
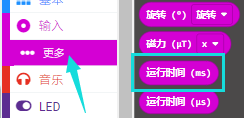
本实验项目主要介绍Micro:bit地磁传感器的使用,地磁传感器除了检测地磁场强度外,还能当作指南针确定方向,同时也是航姿参考系统(AHRS)的重要组成部分。Micro:bit V2主板采用的是LSM303AGR 地磁传感器,磁场动态范围为±50 gauss。在micro:bit V2主板中,磁力检测、指南针积木块均用到了磁力计栏,本实验中,将先介绍指南针,然后查看磁力计原始数据。常见的指南针主要部件是一根磁针,在地磁场的作用下可以转动并指向地磁北极(地磁北极是在地理南极附近),用来辨别方向。
micro:bit内部的一个地磁传感器(磁力计、指南针),我们可以读取这个磁力计的读数来判断方位,得到相对于北磁极的数值。返回值是0到360之间的数值,在磁力计首次开始工作(带到新位置后)时系统会自动要求我们对micro:bit主板校准,正确的校准方式是旋转micro:bit主板。需要注意的是,附近要是有金属物件可能会影响读数和校准准确性。
2.准备:
(1)通过Micro USB线连接Micro:bit主板和电脑。
(2)打开离线版本或Web版本的MakeCode。
如果是选择通过导入Hex文件来加载项目,请单击“导入”。
如果要一一拖动代码块,请单击“新建项目”。
3.实验程序1:
按下按键A的时候,可以在屏幕上显示磁力计的读数。
可以直接加载我们提供的程序,也可以自己通过拖动程序块来编写程序程序,操作步骤如下:
(1)寻找代码块


(2)完整代码程序

程序说明:首先必须对Micro:bit进行校准,因为每个地方地磁场不同,对结果有比较大的的影响,如果是第一次使用指南针,Micro:bit会自动提示需要校准。
4.实验结果1:
按照之前的方式将程序1下载至Micro: bit主板,micro USB数据线不要拔下来,利用Micro USB数据线上电,按下Micro:bit主板上正面按键A时,Micro:bit主板首先提示校准,屏幕(LED点阵)提示:“TILT TO FILL SCREEN”,然后进入校准界面,校准方式为:旋转Micro:bit主板,使得屏幕(LED点阵)画一个封闭的正方形(25个LED都点亮),如下图所示:
当封闭的正方形画好后,会显示一个“笑脸”图案 ,表示校准完成。
校准完成后,当每次按下按键A的时候,直接在屏幕上显示磁力计读数,北、东、南、西对应0°、90°、180°、270°。
,表示校准完成。
校准完成后,当每次按下按键A的时候,直接在屏幕上显示磁力计读数,北、东、南、西对应0°、90°、180°、270°。
5.实验程序2:
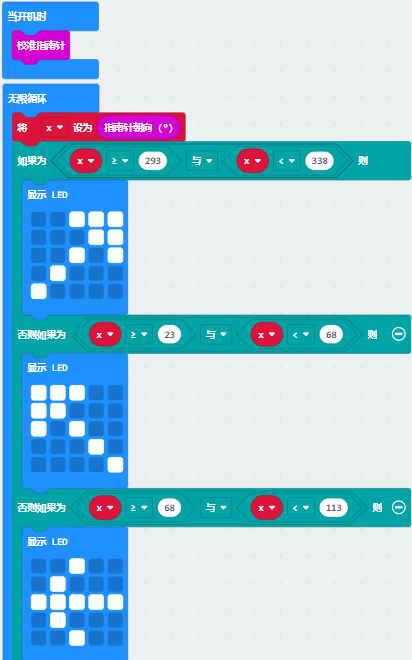
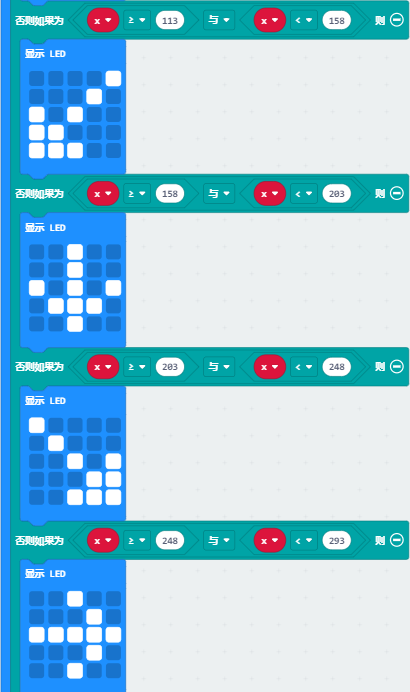
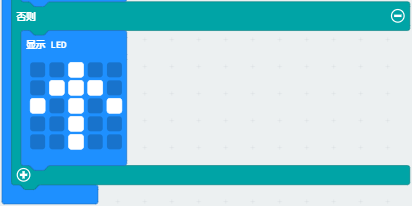
朝不同的方向旋转磁力计,LED点阵显示对应的方向图案。

该代码块是可以持续磁力计的读数来确定方向,并让箭头指向当前的磁北极。
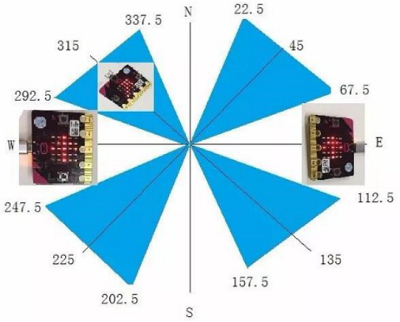
如上图所示,如果读数在292.5和337.5之间,就让显示屏显示一个指向右上方的箭头,由于程序里不能输入0.5,所以取的判断数值是293和338。之后再加入其它逻辑判断条件,就得到了完整的程序。
可以直接加载我们提供的程序,也可以自己通过拖动程序块来编写程序程序,操作步骤如下:
(1)寻找代码块



(2)完整的代码程序
6.实验结果2:
按照之前的方式将程序2下载到Micro:bit主板,Micro USB数据线不要拔下来,利用Micro USB数据线上电,提示校准(校准方法请参考:上面程序1部分),校准完成后,旋转移动Micro:bit主板,可以看到Micro:bit主板上LED点阵显示各方向图案。
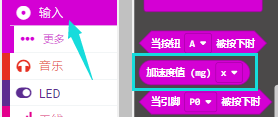
第07课 加速度传感器#

1.实验说明:
Micro:bit V2主板内置有LSM303AGR 重力加速度传感器(加速度计),其具有8/10/12 bits的分辨率,程序可设置量程为1g、2g、4g,、8g。
我们常使用加速度计来检测机器的姿态。
在本实验项目中,将介绍加速度传感器(加速度计)对几个特殊姿态的检测,之后来查看加速度传感器输出的三轴原始数据。
2.准备:
(1)通过Micro USB线连接Micro:bit主板和电脑。
(2)打开离线版本或Web版本的MakeCode。
如果是选择通过导入Hex文件来加载项目,请单击“导入”。
如果要一一拖动代码块,请单击“新建项目”。
3.实验程序1:
对Micro:bit不同的操作,LED点阵显示对应的数字。
可以直接加载我们提供的程序,也可以自己通过拖动程序块来编写程序,操作步骤如下:
(1)寻找代码块
(2)完整代码程序

4.实验结果1:
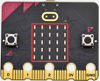
按照之前的方式将程序1下载到Micro:bit主板,利用Micro USB数据线上电,将Micro:bit主板晃动,则可见Micro:bit显示数字1(表明只要有晃动,无论朝哪个方向晃动,该条件都将满足)。
当Micro:bit主板的Logo朝上时,LED点阵显示数字2,Logo朝上示意图如下所示:

同理,Micro:bit主板的Logo朝上时,LED点阵显示数字3(倒立的3),Logo朝下示意图如下所示:

当屏幕朝上(指的是LED点阵朝上)时,LED点阵显示数字4。如下图所示:

同理,当屏幕朝下(指的是LED点阵朝下)时,LED点阵显示数字5。
当Micro:bit 主板向左倾斜(是指LED点阵先朝上,然后再往左边倾斜)时,LED点阵显示数字6。如下图所示:

同理,当Micro:bit主板向右倾斜(是指LED点阵先朝上,然后再往右边倾斜)时,LED点阵显示数字7。如下图所示:

当不小心碰到Micro:bit主板使其从桌面掉落,则为做自由落体运动,此时,Micro:bit主板满足自由落体的条件,则LED点阵显示数字8。(注意:此方法操作时,很容易把micro:bit主板摔坏,不建议操作)
注意:(3g、6g、8g, 如果需要满足此条件,则需要达到3倍,6倍,8倍重力加速度甩动Micro:bit主板。如果你们有兴趣的话,这部分程序可以自己添加)
5.实验程序2:
检测加速度在X轴,Y轴,Z轴的不同的值
可以直接加载我们提供的程序,也可以自己通过拖动程序块来编写程序,操作步骤如下:
(1)寻找代码块
(2)完整的代码程序

6.实验结果2:
按照之前的方式将程序2下载到Micro:bit主板,Micro USB数据线不要拔下来,利用Micro USB数据线上电。
打开CoolTerm,点击Options,选择串行Port,设置COM口和波特率,波特率设置为115200(经过测试,Micro:bit的USB串口通讯波特率是115200),点击OK后,最后点击Connect。CoolTerm串口监视器分别显示了加速度在X轴、Y轴、Z轴的分解,以及加速度的合成(重力加速度及其它外力作用的加速度合成),先将加速计Z轴朝上,然后再将加速计X轴朝上,最后将加速计Z轴朝上,可得数据变化如下图:
第08课 光照强度检测#
1.实验说明:
本实验将介绍Micro:bit对外界光照强度的检测,由于Micro:bit并不自带光敏传感器,对外界光照强度的检测是通过LED矩阵进行的,LED矩阵被用来感知周围的光,并反复地将LED转换成输入,并采样电压衰减时间。这样检测出来的光照强度是一个相对值。
2.准备:
(1)通过Micro USB线连接Micro:bit主板和电脑。
![Img].(./media/img-20230324143645.png)
(2)打开离线版本或Web版本的MakeCode。
如果是选择通过导入Hex文件来加载项目,请单击“导入”。
如果要一一拖动代码块,请单击“新建项目”。
3.实验程序:
可以直接加载我们提供的程序,也可以自己通过拖动程序块来编写程序,操作步骤如下:
(1)寻找代码块

(2)完整代码程序

4.实验结果:
按照之前的方式将代码下载到Micro:bit主板,Micro USB数据线不要拔下来,利用Micro USB数据线上电。
打开CoolTerm,点击Options,选择串行Port,设置COM口和波特率,波特率设置为115200(经过测试,micro:bit的USB串口通讯波特率是115200),点击OK后,最后点击Connect。这样,CoolTerm串口监视器显示光线亮度级别值。
第09课 扬声器#

1.实验说明:
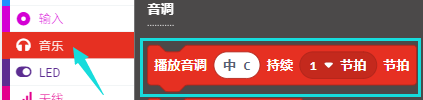
Micro:bit主板有内置扬声器,这使得在你的项目中添加声音变得非常容易。通过编程使扬声器发出各种各样的音调,例如编写一首歌曲:《欢乐颂》,让扬声器播放出来。
2.准备:
(1)通过Micro USB线连接Micro:bit主板和电脑。
(2)打开离线版本或Web版本的MakeCode。
如果是选择通过导入Hex文件来加载项目,请单击“导入”。
如果要一一拖动代码块,请单击“新建项目”。
3.实验程序1:
发出声音
可以直接加载我们提供的程序,也可以自己通过拖动程序块来编写程序,操作步骤如下:
(1)寻找代码块

(2)完整代码程序

4.实验现象1:
按照之前的方式将实验程序1下载到Micro:bit主板,利用Micro USB数据线上电,Micro:bit主板上的扬声器发出声音且LED点阵显示音乐标志图案。
5.实验程序2:
演奏一首《欢乐颂》歌曲, 歌曲《欢乐颂》的简谱如下:

更多音乐简谱知识的相关链接:https://en.wikipedia.org/wiki/Numbered_musical_notation
可以直接加载我们提供的程序,也可以自己通过拖动程序块来编写程序,操作步骤如下:
(1)寻找代码块
(2)完整代码程序








6.实验现象2:
按照之前的方式将实验程序2下载到Micro:bit主板,利用Micro USB数据线上电,Micro:bit主板上的扬声器播放一首《欢乐颂》歌曲。
第10课 触摸感应logo#
1.实验说明:
如果你有了Micro:bit主板,你可以在你的项目中使用金色的触摸感应logo作为另一个输入,这就像多了一个按钮。触摸感应采用的是电容式触摸传感器,当你手指按下(或触摸)它时,它就能感应到电场的微小变化----就像你的手机或平板电脑屏幕一样。当你触摸它,能控制Micro:bit板实现某个功能。
2.准备:
(1)通过Micro USB线连接Micro:bit主板和电脑。
(2)打开离线版本或Web版本的MakeCode。
如果是选择通过导入Hex文件来加载项目,请单击“导入”。
如果要一一拖动代码块,请单击“新建项目”。
3.实验代码:
可以直接加载我们提供的程序,也可以自己通过拖动程序块来编写程序,操作步骤如下:
(1)寻找代码块




(2)完整代码程序

4.实验现象:
按照之前的方式将实验代码下载到Micro:bit板,利用Micro USB数据线上电,手指按住Micro:bit主板上“Logo”标志处,Micro:bit主板上的LED点阵显示“❤”图案;手指松开Micro:bit主板上“Logo”标志处,会出现数字。
第11课 麦克风#

1.实验说明:
Micro:bit 主板有一个内置麦克风,可以测量环境的声音程度。你可以使用它作为一个简单的输入—当你鼓掌时,Micro:bit主板上前面内置麦克风LED指示灯会被打开。它还可以测量声音的强度,所以你可以制作一个噪音等级表或与音乐合拍的迪斯科灯光。麦克风是在Micro:bit 主板的背面,而在前面,你会发现一个内置麦克风LED指示灯,还有紧挨着让声音进入麦克风的孔。当你Micro:bit主板在测量声音级别时,它就会亮起来。
2.准备:
(1)通过Micro USB线连接Micro:bit主板和电脑。
(2)打开离线版本或Web版本的MakeCode。
如果是选择通过导入Hex文件来加载项目,请单击“导入”。
如果要一一拖动代码块,请单击“新建项目”。
3.实验程序1:
可以直接加载我们提供的程序,也可以自己通过拖动程序块来编写程序,操作步骤如下:
(1)寻找代码块

(2)完整代码程序
4.实验结果1:
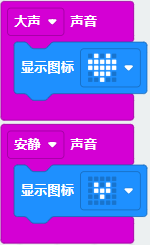
按照之前的方式将实验程序1下载到Micro:bit板,利用Micro USB数据线上电,当你鼓掌时,Micro:bit 主板上的LED点阵显示“❤”图案;当外界环境安静时,Micro:bit 主板上的LED点阵显示“ ”图案。
”图案。
5.实验程序2:
可以直接加载我们提供的程序,也可以自己通过拖动程序块来编写程序,操作步骤如下:
(1)寻找代码块



(2)完整代码程序

6.实验结果2:
按照之前的方式将实验程序2下载到Micro:bit主板,利用Micro USB数据线上电。
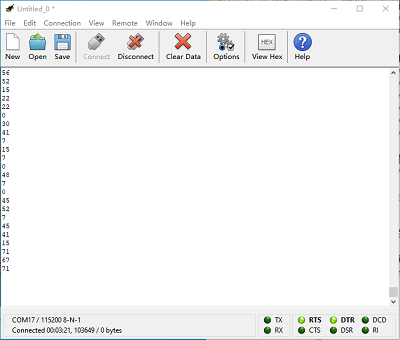
打开CoolTerm,点击Options,选择串行Port,设置COM口和波特率,波特率设置为115200(经过测试,Micro:bit的USB串口通讯波特率是115200),点击OK后,最后点击Connect。CoolTerm串口监视器显示了声音强度值。
第12课 Microbit 蓝牙无线通信#

1.实验说明:
Micro:bit主板了处理器内置蓝牙5.1低功耗的BLE(蓝牙 Low Energy)设备)以及2.4GHz天线,可进行蓝牙无线通信和2.4GHz无线通信。使得Micro:bit主板可以与各种蓝牙设备进行通信,包括智能手机和平板电脑。
在本实验中,主要讲解新款的Micro:bit主板实现蓝牙无线通信功能,我们可以通过连接蓝牙,实现无线传输代码(信号)功能。我们利用一个苹果系统设备(手机/iPad)和Micro:bit 主板连接,实现无线传输功能。设置安卓系统手机实现无线传输方法和苹果系统设备(手机/iPad)类似,这里就不一一介绍了。
2.准备:
(1)通过Micro USB线连接Micro:bit主板和电脑。
(2)苹果系统设备(手机/iPad)或安卓系统手机。
3.实验步骤:
App下载链接:https://microbit.org/get-started/user-guide/mobile/ (安卓系统下载参考链接)
我们以苹果系统设备为例:
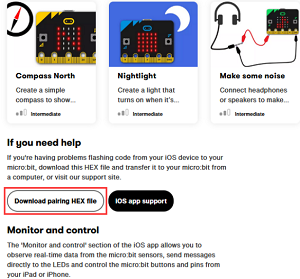
(1)如果你的智能手机/iPad是苹果系统的,需要先在电脑上进入网页:https://www.microbit.org/get-started/user-guide/ble-ios/ ,往下翻点击“Download pairing HEX file”下载micro:bit的固件到创建的文件夹中或电脑桌面上,并将下载好的Micro:bit固件烧入Micro:bit主板中。(这一步只针对于苹果系统的智能手机/iPad,安卓系统智能手机/不需要这一步)
(2)在苹果系统设备(手机/iPad)上打开 ,在App Store的搜索框中输入“micro bit”,然后选中micro:bit 选项,会出现下载界面(如下图所示:),点击“
,在App Store的搜索框中输入“micro bit”,然后选中micro:bit 选项,会出现下载界面(如下图所示:),点击“ ”,就可以下载安装对应的APP。
”,就可以下载安装对应的APP。

(3)苹果系统设备(手机/iPad)和Micro:bit主板配对连接。
a.APP安装成功后,打开苹果系统设备(手机/iPad)上的蓝牙。

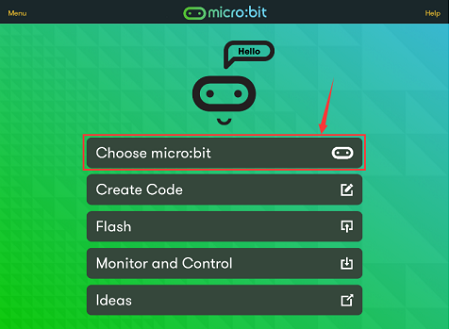
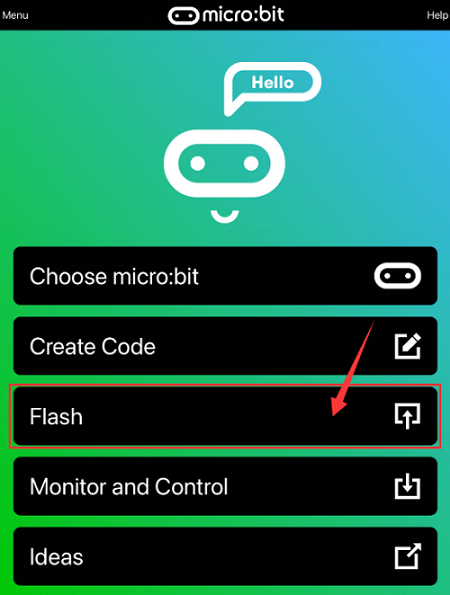
b.点击 打开APP,先确定Micro USB数据线已经将Micro:bit主板和电脑连接上,再点击APP的第一项“Choose micro:bit”,开始配对蓝牙。
打开APP,先确定Micro USB数据线已经将Micro:bit主板和电脑连接上,再点击APP的第一项“Choose micro:bit”,开始配对蓝牙。
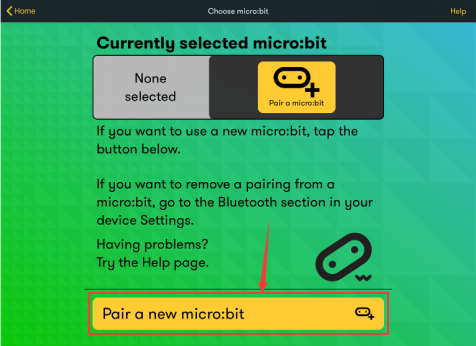
c.点击“Pair a new micro:bit”,开始配对。
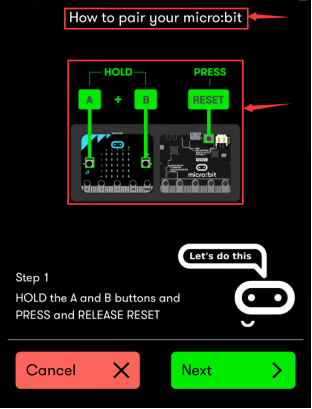
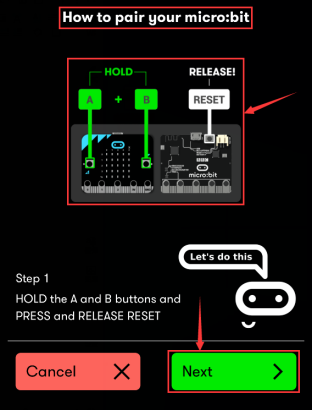
d.根据提示,首先同时按住micro:bit主板上的按键A和B,然后按下micro:bit主板后面的复位&电源按钮几秒钟(按键A和B不能松开),再松开复位&电源按钮,micro:bit主板上LED点阵会显示一个密码图案。最后松开micro:bit主板上的按键A和B,接着点击“Next”。
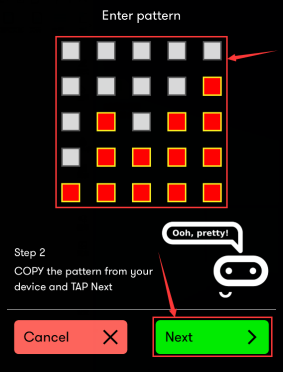
e.在苹果系统手机/iPad上设置密码图案,使图案和micro:bit主板上显示的密码图案一样,点击“Next”。
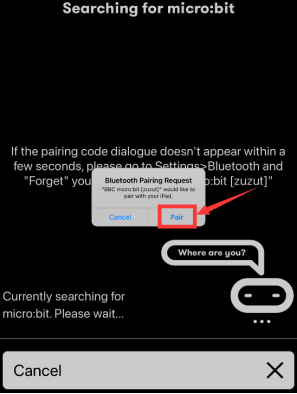
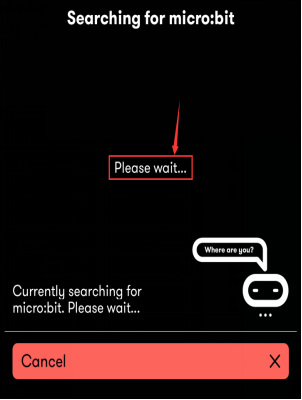
f.点击“Next”,出现对话框,在对话框中点击“Pair”。几秒钟后,配对成功,同时Micro:bit主板上的LED点阵显示“√”图案。


(4)蓝牙配对成功后,开始利用APP编写代码,并上传代码。
a.点击第二项“Create Code”,进入编程界面,开始编写代码程序。
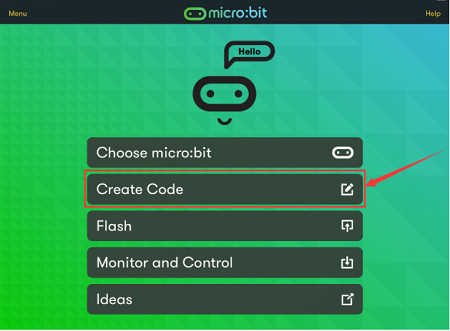

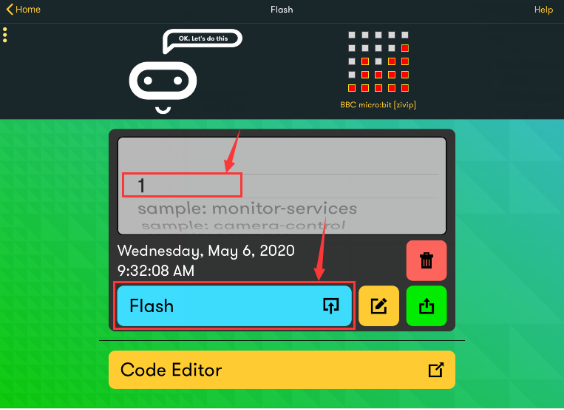
b. 将代码程序项目名称设置为“1”,点击保存图案“ ”,保存代码程序。
”,保存代码程序。
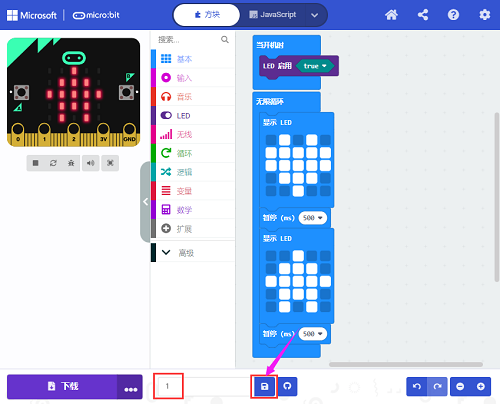
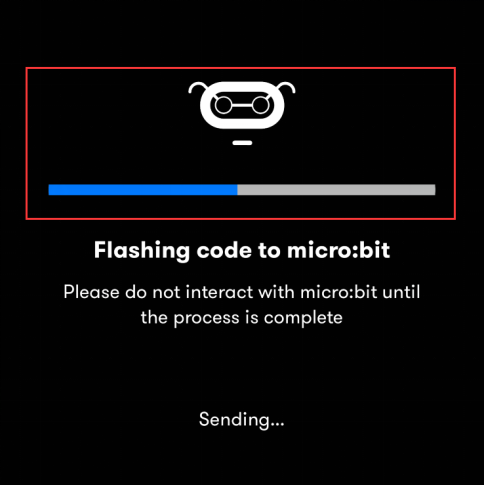
c.项目代码程序保存成功后,点击第三项“Flash”进入上传代码程序界面。默认选择代码程序是刚刚保存的项目名称为“1”的代码程序,然后点击“Flash”上传代码程序“1”。
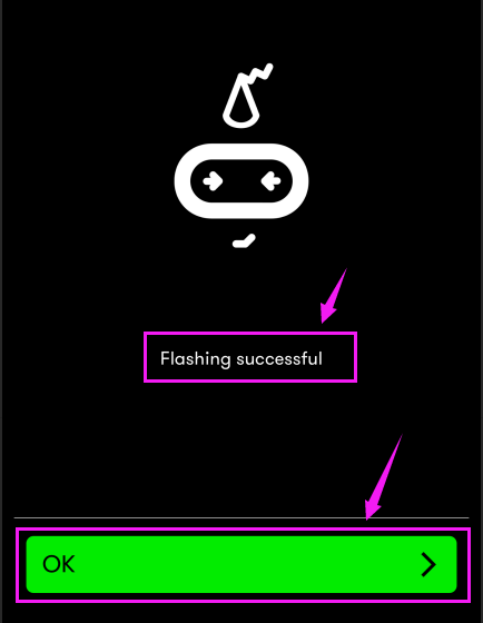
d.几秒钟后,代码程序“1”上传成功,会显示如下图。然后micro:bit主板上的LED点阵显示跳跃的“心”对应图案.
Microbit 机械手臂课程#
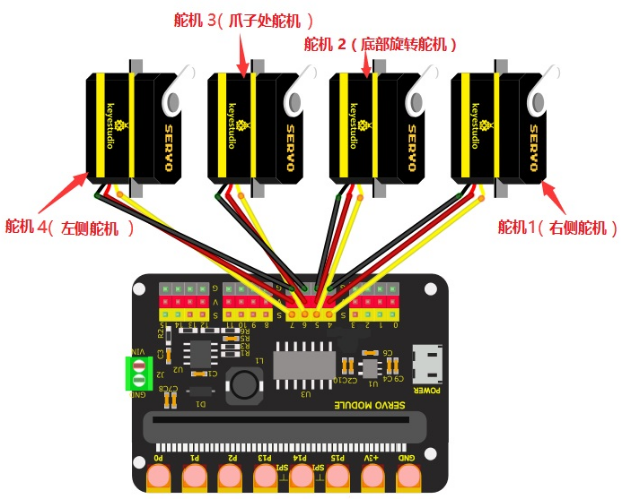
第13课 4自由度机械手臂各个关节转动和控制引脚#
第1小节 4自由度机械手臂各关节的转动方向与舵机角度设置
名称 |
0° |
180° |
|---|---|---|
舵机1(右侧舵机) |
连接舵机1的小摆杆往后下摆 |
连接舵机1的小摆杆往上前摆 |
舵机2(底座转动舵机) |
转到最右边 |
转到最左边 |
舵机3(爪子处舵机) |
机械抓打开 |
机械爪闭合 |
舵机4(左侧舵机) |
连接舵机4的大摆杆往前摆 |
连接舵机4的大摆杆往后摆 |
第2小节 控制引脚
舵机1(右侧舵机) |
Micro:bit 16路舵机扩展板 |
|---|---|
棕线 |
G |
红线 |
V |
橙线 |
S(4) |
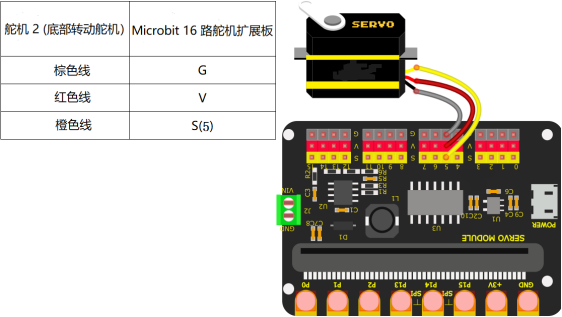
舵机2(底座转动舵机) |
Micro:bit 16路舵机扩展板 |
|---|---|
棕线 |
G |
红线 |
V |
橙线 |
S(5) |
舵机3(爪子舵机) |
Micro:bit 16路舵机扩展板 |
|---|---|
棕线 |
G |
红线 |
V |
橙线 |
S(6) |
舵机4(左侧舵机) |
Micro:bit 16路舵机扩展板 |
|---|---|
棕线 |
G |
红线 |
V |
橙线 |
S(7) |
左侧摇杆模块(引脚) |
Micro:bit 16路舵机扩展板 |
|---|---|
Y |
P0 |
X |
P1 |
V |
+3V |
G |
GND |
右侧摇杆模块(引脚) |
Micro:bit 16路舵机扩展板 |
|---|---|
Y |
P2 |
B |
P13 |
V |
P14 |
G |
P15 |
第14课 舵机转动#
1.实验说明:
在前面的机械手臂安装文档中,我们已经设置了舵机角度。舵机是一种可以非常精确地旋转的电机。目前已广泛应用于玩具车、遥控直升机、飞机、机器人等领域。在这个项目中,我们再次来学习一个舵机转动。
2.元件知识:

舵机: 舵机是一种位置伺服的驱动器,主要是由外壳、电路板、无核心马达、齿轮与位置检测器所构成。其工作原理是由接收机或者单片机发出信号给舵机,其内部有一个基准电路,产生周期为20ms,宽度为1.5ms 的基准信号,将获得的直流偏置电压与电位器的电压比较,获得电压差输出。经由电路板上的IC 判断转动方向,再驱动无核心马达开始转动,透过减速齿轮将动力传至摆臂,同时由位置检测器送回信号,判断是否已经到达定位。适用于那些需要角度不断变化并可以保持的控制系统。当电机转速一定时,通过级联减速齿轮带动电位器旋转,使得电压差为0,电机停止转动。
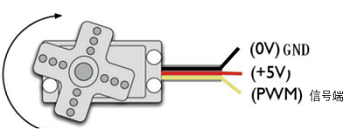
舵机有多种规格,但它们都有三根连接线,分别是棕色、红色、橙色(不同品牌可能有不同的颜色)。棕色为GND,红色为电源正极,橙色为信号线
舵机的伺服系统由可变宽度的脉冲来进行控制,橙色的控制线是用来传送脉冲的。一般而言,PWM控制舵机的基准信号周期为20ms(50Hz),理论上脉宽应在1ms到2ms之间,对应控制舵机角度是0°~180°。但是,实际上更多控制舵机的脉宽范围是0.5ms 到2.5ms,具体需要自己实际调试下。
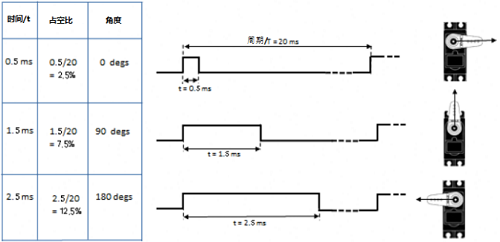
经过实测,舵机的脉冲范围为0.65ms~2.5ms。180度舵机,对应的控制关系是这样的:
高电平时间 |
舵机角度 |
基准信号周期时间(20ms) |
|---|---|---|
0.65ms |
0度 |
0.65ms高电平+19.35ms低电平 |
1.5ms |
90度 |
1.5ms高电平+18.5ms低电平 |
2.5ms |
180度 |
2.5ms高电平+17.5ms低电平 |
舵机的规格参数:
工作电压: |
DC 4.8V〜6V |
|---|---|
可操作角度范围: |
可操作角度范围: |
脉波宽度范围: |
500→2500 μsec |
外观尺寸: |
22.912.230mm |
空载转速: |
0.12±0.01 sec/60度(DC 4.8V) 0.1±0.01 sec/60度(DC 6V) |
空载电流: |
200±20mA(DC 4.8V) 220±20mA(DC 6V) |
停止扭力: |
1.3±0.01kg·cm(DC 4.8V) 1.5±0.1kg·cm(DC 6V) |
停止电流: |
≦850mA(DC 4.8V) ≦1000mA(DC 6V) |
待机电流: |
3±1mA(DC 4.8V) 4±1mA(DC 6V) |
重量: |
9±1g (不带舵机轴) |
使用温度: |
-30℃~60℃ |
3.实验接线:
4.实验准备:
(1)将Micro:bit主板正确插入4自由度机械手臂的Microbit 16路舵机扩展板。
(2)外接电源。
(3)通过Micro USB线连接Micro:bit和电脑。
(4)打开离线版本或Web版本的Makecode。
如果选择通过导入Hex文件来加载项目,则无需手动添加pca9685扩展库。
如果选择手动拖动代码,则首先需要添加pca9685扩展库。
5.实验代码:
可以直接加载我们提供的程序,也可以自己通过拖动程序块来编写程序程序,操作步骤如下:
(1)添加库文件
特别提醒:如果已经添加好了库文件,此步骤直接跳过。
打开MakeCode,先点击右上角的齿轮图标(设置),再点击“扩展”。
或者单击“高级”上的“扩展”。
在搜索框中输入链接:https://github.com/keyestudio2019/pxt-pca9685-smallest,然后单击搜索。
单击搜索结果pca9685以下载并安装。 该过程可能需要几秒钟。
安装完成后,你可以在左侧找到pca9685的扩展库。
注意:添加到项目中的扩展库仅对该项目有效,而不会出现在其他项目中。 因此,当你创建新项目代码时,需要再次添加pca9685扩展库。
(2)寻找代码块
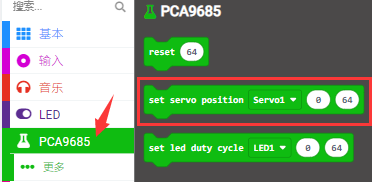


(3)完整代码程序

6.实验结果:
按照之前的方式将程序下载至Micro: bit主板,利用外接电源供电。上电后,按一下Micro: bit主板上的复位按钮,4自由度机械手臂的舵机2(底座转动舵机)将从右边向左边转动,再从左边向右边转动,循环进行。
第15课 按键控制舵机#
1.实验说明:
在前面的项目实验中,我们已经了解过舵机的控制和Microbit主板上按键的工作原理及应用。那么在这个项目中,我们将学习使用Microbit主板上的按键AB来控制舵机的转动。
2.实验接线:
3.实验准备:
(1)将Micro:bit主板正确插入4自由度机械手臂的Microbit 16路舵机扩展板。
(2)外接电源。
(3)通过Micro USB线连接Micro:bit和电脑。
(4)打开离线版本或Web版本的Makecode。
如果选择通过导入Hex文件来加载项目,则无需手动添加pca9685扩展库。
如果选择手动拖动代码,则首先需要添加pca9685扩展库。
4.实验代码:
本程序实现的功能是通过 AB 键控制舵机2(底座转动舵机)左右转,按 A 键的时候4自由度机械手臂的舵机2(底座转动舵机)向左转,按 B 键的时候4自由度机械手臂的舵机2(底座转动舵机)向右转。
可以直接加载我们提供的程序,也可以自己通过拖动程序块来编写程序程序,操作步骤如下:
(1)添加库文件
特别提醒:如果已经添加好了库文件,此步骤直接跳过。
打开MakeCode,先点击右上角的齿轮图标(设置),再点击“扩展”。
或者单击“高级”上的“扩展”。
在搜索框中输入链接:https://github.com/keyestudio2019/pxt-pca9685-smallest,然后单击搜索。
单击搜索结果pca9685以下载并安装。 该过程可能需要几秒钟。
安装完成后,你可以在左侧找到pca9685的扩展库。
注意:添加到项目中的扩展库仅对该项目有效,而不会出现在其他项目中。 因此,当你创建新项目代码时,需要再次添加pca9685扩展库。
(2)寻找代码块


(3)完整代码程序
5.实验结果:
按照之前的方式将程序下载至Micro: bit主板,利用外接电源供电。上电后,按一下Micro: bit主板上的复位按钮,通过Micro: bit主板上的A B键来控制4自由度机械手臂的舵机2(底座转动舵机)转动,按A键的时候4自由度机械手臂的舵机2(底座转动舵机)向左转,按B键的时候4自由度机械手臂的舵机2(底座转动舵机)向右转。
第16课 读取摇杆值#
1.实验说明:
摇杆模块是一个有两个模拟输入和一个数字输入的组件。广泛应用于游戏操作、机器人控制、无人机控制等领域。摇杆模块的X、Y引脚就是模拟输入,直接读取其测得的模拟值就可,Z轴(B引脚)是数字按钮,要先设置其引脚为输入状态,再读取测到的数值是1(按下)或0(没按下)。将读取到的值打印到串口监视器。
2.元件知识:
摇杆模块: 主要是采用PS2 手柄摇杆元件,实际上摇杆模块有3个信号端引脚,模拟3维空间,摇杆模块的引脚分别是GND、VCC、信号端(B、X、Y),其中信号端X、Y模拟空间的X轴和Y轴,控制时,模块的X、Y信号端是连接单片机模拟口,通过控制2个模拟输入值来控制物体在空间X、Y轴的坐标。信号端B模拟空间Z轴,它一般是接数字口,做按键使用。
VCC接单片机电源输出端V/VCC(3.3/5V),GND接单片机G/GND,原始状态下读出电压大约为1.65V/2.5V左右,对于X轴方向,当随箭头方向逐渐按下,读出电压值随着增加,且可以达到最大电压,随箭头相反方向逐渐按下,读出电压值逐渐减少,减少到最小电压;对于Y轴方向,当沿着模块上的箭头方向逐渐按下,读出电压值逐渐减少,减少到最小电压,随箭头相反方向逐渐按下,读出电压值随着增加,且可以达到最大电压;对于Z轴方向,信号端B接数字口,原始状态下输出0,按下输出1。这样,我们可以读取两个模拟值和一个数字口的高低电平情况,判断模块上摇杆的工作状态。
模块参数:
输入电压:DC 3.3V ~ 5V
输出信号:X/Y双轴模拟值+Z轴数字信号
适用范围:适用于控制点坐标在平面内的运动,双自由度舵机的控制等。
产品特点:外观精美,摇杆手感优越,操作简单,反应灵敏,使用寿命长。
3.实验接线:
4.实验准备:
(1)将Micro:bit主板正确插入4自由度机械手臂的Microbit 16路舵机扩展板。
(2)外接电源。
(3)通过Micro USB线连接Micro:bit和电脑。
(4)打开离线版本或Web版本的Makecode。
5.实验代码:
可以直接加载我们提供的程序,也可以自己通过拖动程序块来编写程序程序,操作步骤如下:
(1)寻找代码块



(2)完整代码程序

6.实验结果:
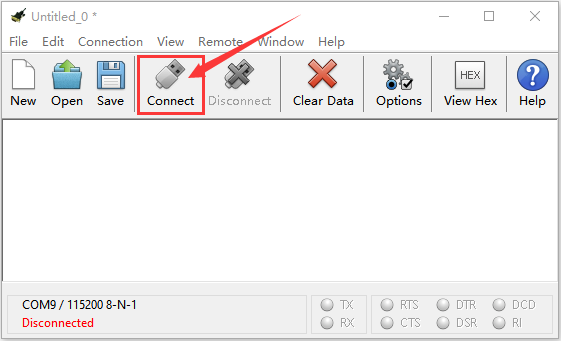
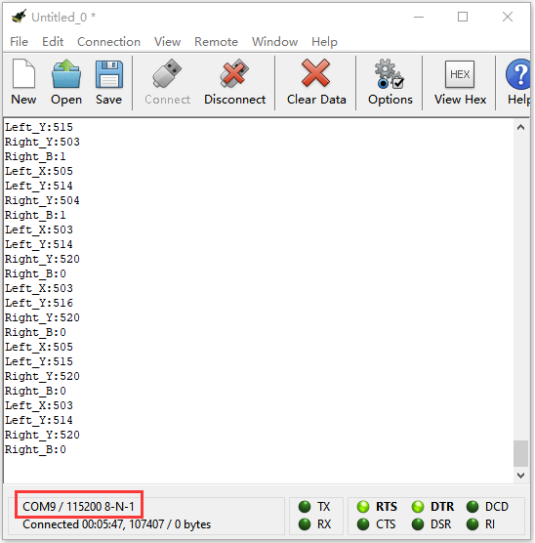
按照之前的方式将程序下载至Micro: bit主板,Micro USB数据线不要拔下来,利用Micro USB数据线上电,并且还利用外接电源供电。打开CoolTerm,点击Options,选择串行Port,设置COM口和波特率,波特率设置为115200(经过测试,Micro:bit的USB串口通讯波特率是115200),点击OK后,最后点击Connect。CoolTerm的串口监视器显示左边摇杆模块的X、Y引脚的模拟值;右摇杆模块的Y引脚的模拟值和右摇杆模块的B引脚(按钮)的数字信号值,摇动左、右摇杆模块及按下、松开右摇杆模块按钮,模拟值和数字信号值会发生变化。如下图:
第17课 双摇杆控制4自由度机械手臂#
1.实验说明:
前面课程中我们学习了舵机的基本原理与应用,同时也学习了读取摇杆的值。则在这一课程中,我们将这两个实验结合起来,实现通过利用两个摇杆模块,来控制4自由度机械手臂实现各种运动。
控制时我们先设置开机的姿势;摇杆模块控制4自由度机械手臂的如下表格:
初始化(即舵机初始角度)
舵机4(左侧舵机):120° |
舵机1(右侧舵机):60° |
|---|---|
舵机2(底座转动舵机):90° |
舵机3(爪子处舵机):60° |
左、右摇杆模块控制4自由度机械手臂
左摇杆 |
舵机 |
右摇杆 |
舵机 |
|---|---|---|---|
x<100 |
舵机2(底座转动舵机)的角度会逐渐减到30度(即:左摇杆摆到后面时,控制机械手臂转动的舵机2往右转,转到30度就停下。) |
y2<100 |
舵机1(右侧舵机)的角度会逐渐增大到180°(即:右摇杆摆到右边时,连接舵机1的小摆杆往上前摆。) |
x>900 |
舵机2(底座转动舵机)逐渐加到150度(即:左摇杆摆到前面时,控制机械手臂转动的舵机2往左转,转到150度就停下。) |
y2>800 |
舵机1(右侧舵机)的角度会逐渐减少到0°(即:右摇杆摆到左边时,连接舵机1的小摆杆往后下摆。) |
y1>900 |
舵机4(左侧舵机)的角度会逐渐增加到180°(即:左摇杆摆到左边时,连接舵机4的大摆杆往后摆。) |
z=1 |
舵机3(爪子处舵机)的角度为180°(即:按住右摇杆的按钮,机械爪闭合。) |
y1<100 |
舵机4(左侧舵机)的角度会逐渐减少到35°(即:左摇杆摆到右边时,连接舵机4的大摆杆往前摆。) |
z=0 |
舵机3(爪子处舵机)的角度为60°(即:松开右摇杆的按钮,机械爪打开。) |
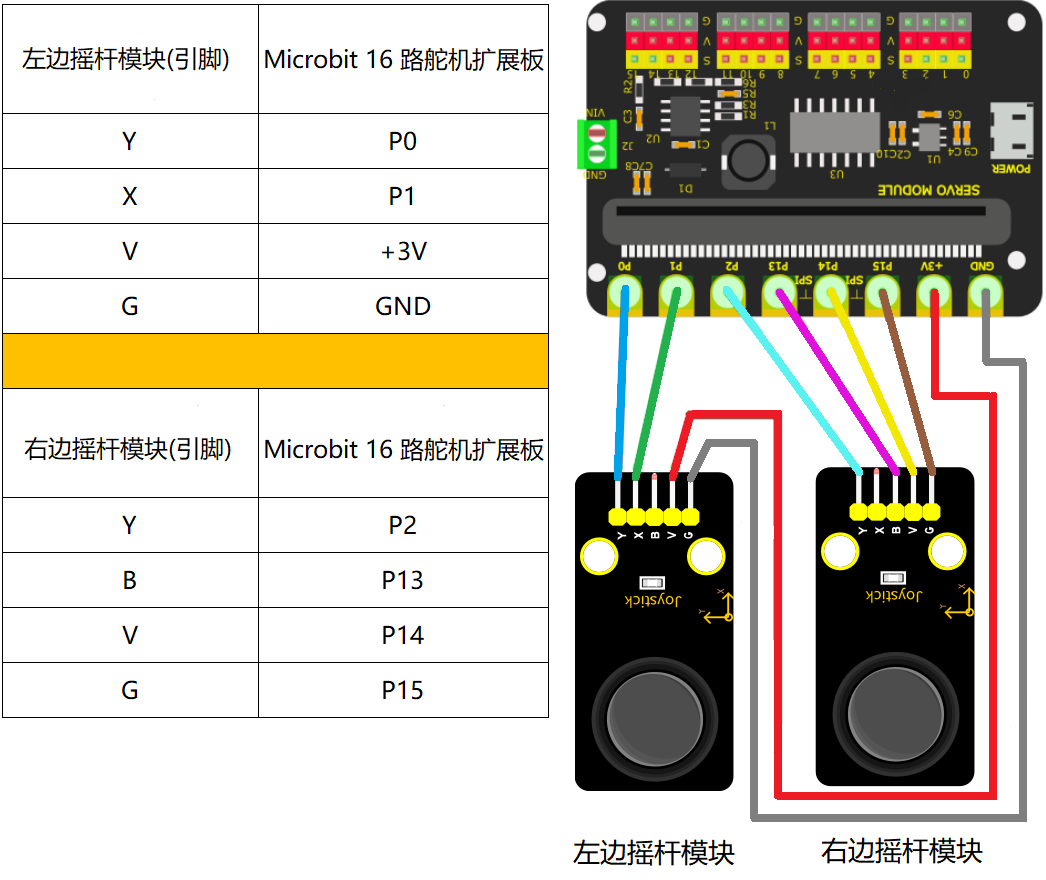
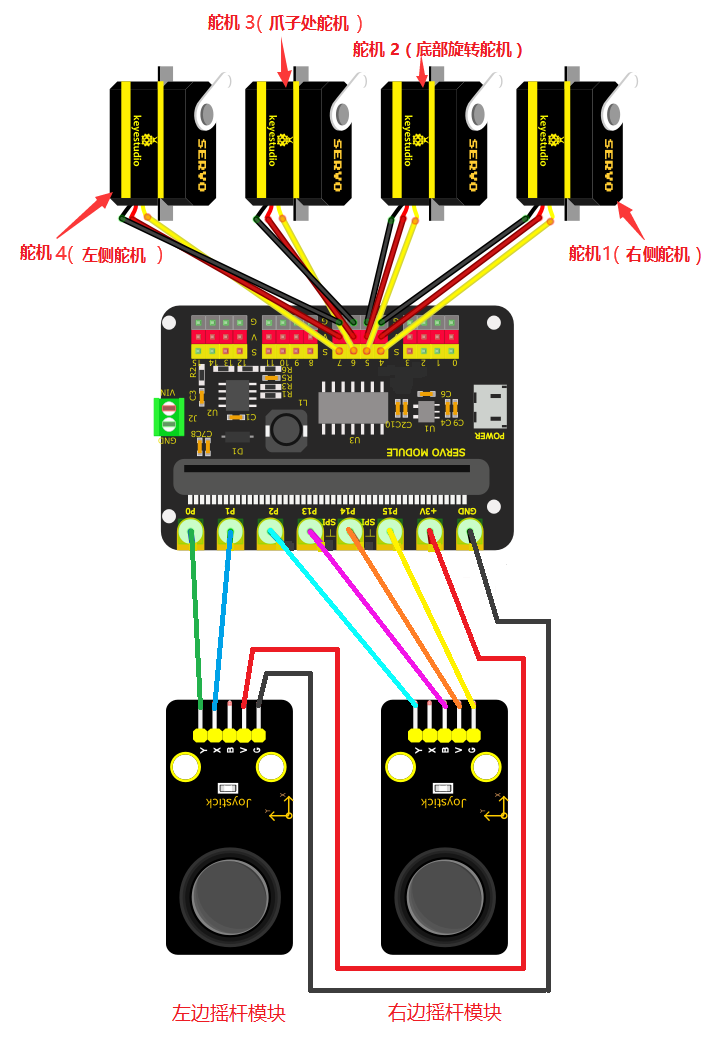
2.实验接线:
舵机1(右侧舵机) |
Micro:bit 16路舵机扩展板 |
|---|---|
棕线 |
G |
红线 |
V |
橙线 |
S(4) |
舵机2(底座转动舵机) |
Micro:bit 16路舵机扩展板 |
|---|---|
棕线 |
G |
红线 |
V |
橙线 |
S(5) |
舵机3(爪子处舵机) |
Micro:bit 16路舵机扩展板 |
|---|---|
棕线 |
G |
红线 |
V |
橙线 |
S(6) |
舵机4(左侧舵机) |
Micro:bit 16路舵机扩展板 |
|---|---|
棕线 |
G |
红线 |
V |
橙线 |
S(7) |
左边摇杆模块(引脚) |
Micro:bit 16路舵机扩展板 |
|---|---|
Y |
P0 |
X |
P1 |
V |
+3V |
G |
GND |
右边摇杆模块(引脚) |
Micro:bit 16路舵机扩展板 |
|---|---|
Y |
P2 |
B |
P13 |
V |
P14 |
G |
P15 |
3.实验准备:
(1)将Micro:bit主板正确插入4自由度机械手臂的Microbit 16路舵机扩展板。
(2)外接电源。
(3)通过Micro USB线连接Micro:bit和电脑。
(4)打开离线版本或Web版本的Makecode。
如果选择通过导入Hex文件来加载项目,则无需手动添加pca9685扩展库。
如果选择手动拖动代码,则首先需要添加pca9685扩展库。
4.实验代码:
可以直接加载我们提供的程序,也可以自己通过拖动程序块来编写程序程序,操作步骤如下:
(1)添加库文件
特别提醒:如果已经添加好了库文件,此步骤直接跳过。
打开MakeCode,先点击右上角的齿轮图标(设置),再点击“扩展”。
或者单击“高级”上的“扩展”。
在搜索框中输入链接:https://github.com/keyestudio2019/pxt-pca9685-smallest,然后单击搜索。
单击搜索结果pca9685以下载并安装。 该过程可能需要几秒钟。
安装完成后,你可以在左侧找到pca9685的扩展库。
注意:添加到项目中的扩展库仅对该项目有效,而不会出现在其他项目中。 因此,当你创建新项目代码时,需要再次添加pca9685扩展库。
(2)寻找代码块


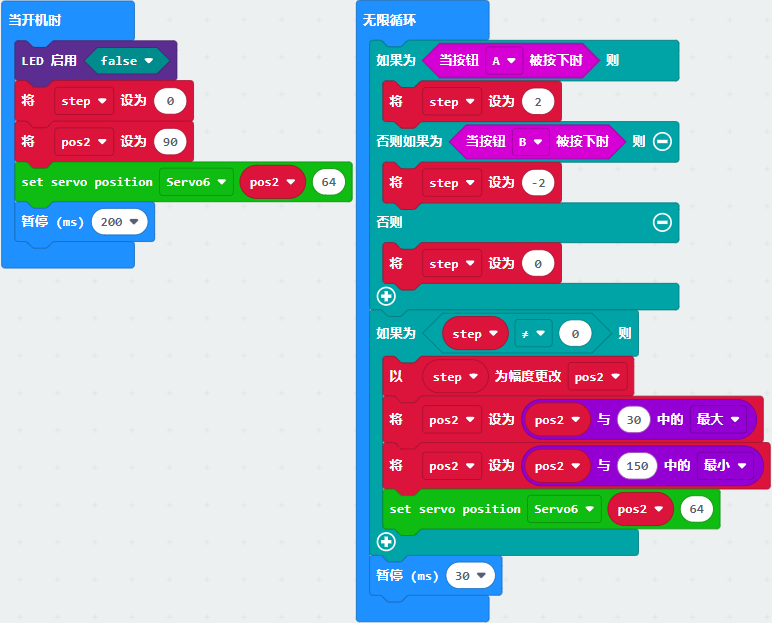
(3)完整代码程序
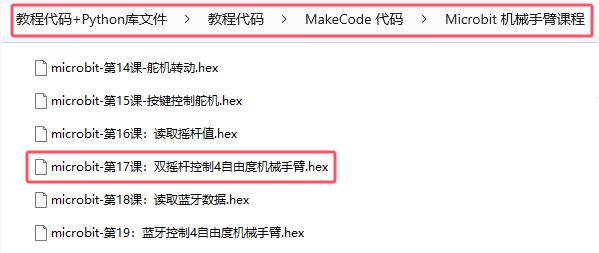
由于代码比较长,请打开我们提供的示例代码“第17课:双摇杆控制4自由度机械手臂.hex”查看.
5.实验结果:
按照之前的方式将程序下载至Micro: bit主板,利用外接电源供电。上电后,按一下Micro: bit主板上的复位按钮,4自由度机械手臂将处于初始位置,摇动左右两个摇杆模块(左摇杆沿着X轴和Y轴方向摇动;右摇杆沿着Y轴方向摇动及按下、松开右摇杆按钮),即可控制4自由度机械手臂实现各种运动。
第18课 读取蓝牙数据#

1.实验说明:
Micro:bit控制板上自带有蓝牙,可以通过蓝牙方式与Micro:bit通讯,即可以用蓝牙控制Micro:bit主板,或者Micro:bit主板通过蓝牙把信号传回手机或者电脑,我们可以利用Micro:bit主板上自带的蓝牙和手机蓝牙APP通信,利用蓝牙手机APP控制Micro:bit外接设备工作。Micro:bit上自带的蓝牙既支持安卓系统手机,也支持IOS系统设备(手机或iPad)。我们为您提供两种蓝牙APP,适用于安卓系和IOS系统。这两种APP连接Micro:bit蓝牙的方法是类似的。在这一课程中,我们主要介绍蓝牙APP的使用和APP界面上各按钮的功能,并且通过蓝牙APP连接Micro:bit上的蓝牙来读取了APP界面上各按钮发送的控制字符。
2.安装Android(或iOS)手机/平板蓝牙APP
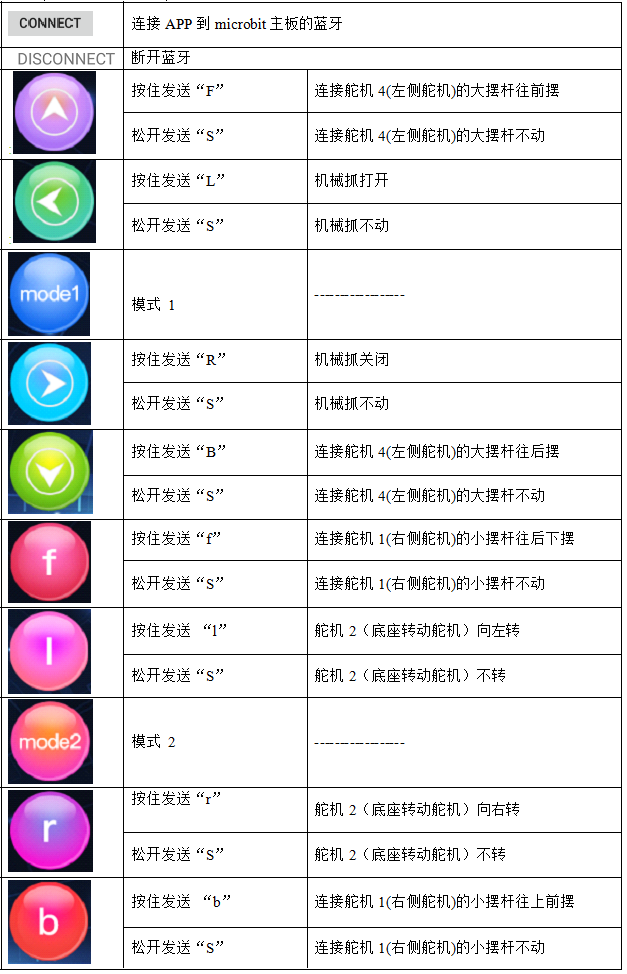
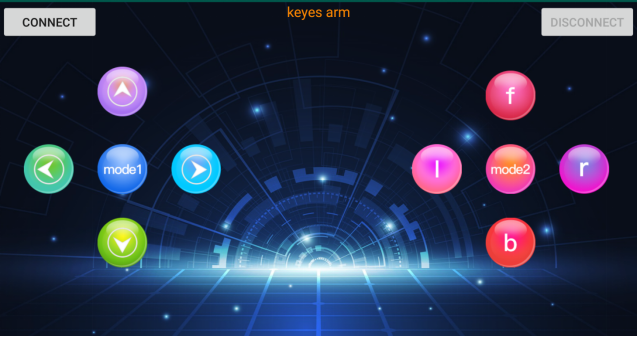
我们设计控制机械手臂的APP控件如下图所示:
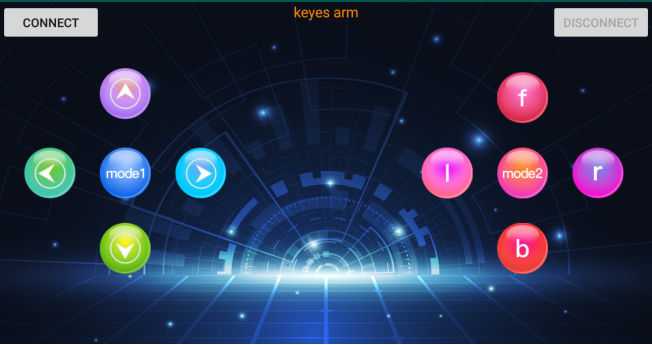
App上有10个控制键,当Micro:bit主板上的蓝牙模块与Android(或iOS)系统手机/平板上的蓝牙APP通过蓝牙连接好后,按下控制键,Android(或iOS)系统手机/平板上的APP通过蓝牙就会发送相应的数值。编程时,可以为控制键设置相应的值。所以在实验中,我们会对每个控制键进行测试,在串口监视器中得到相应的值。
Android系统APP安装步骤:
1.下载keyes arm.apk文件
A. 我们资料包中有提供Android apk安装包,在下图位置:
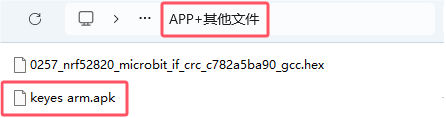
现将文件夹中的 keyes arm.apk 文件转移到安卓系统手机或平板电脑上。
B.使用手机浏览器中的扫描功能去扫二维码下载APP。

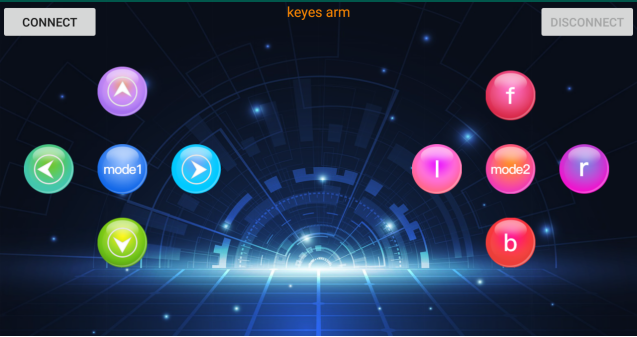
2.点击keyes arm.apk文件安装“keyes arm”APP ,界面如下所示:
,界面如下所示:
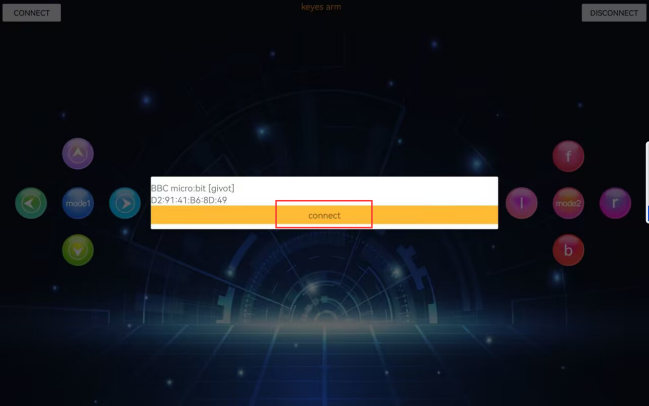
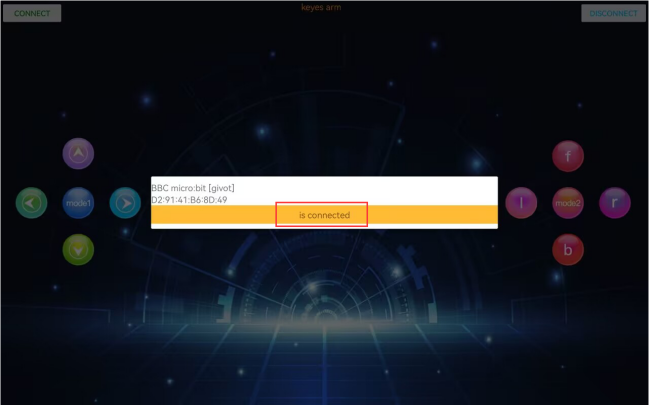
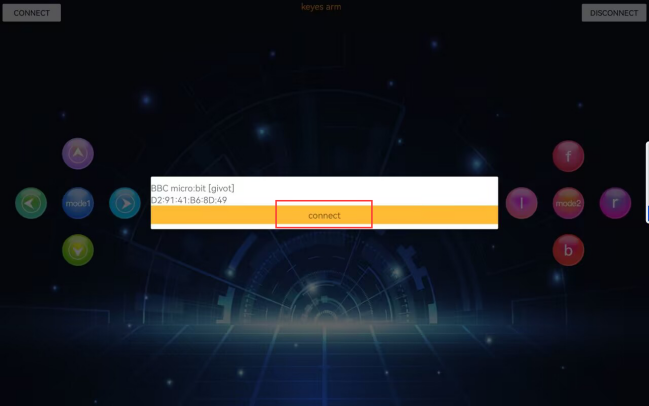
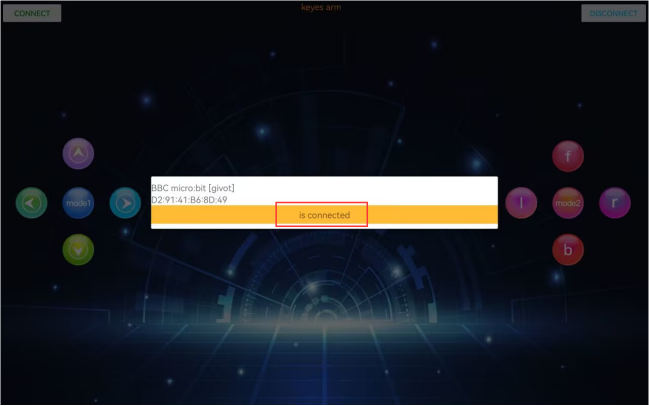
3.先开启手机/平板的蓝牙,再打开App,点击“CONNECT”进行蓝牙搜索,在搜索结果中寻找“BCC micro:bit”对话框,在“BCC micro:bit”对话框中点击“connect”即可连接蓝牙。当对话框的“connect”变成“is connected”,说明蓝牙连接成功。
IOS系统APP安装步骤:
a.打开App Store。

b.在App Store中输入并搜索“keyes arm”,然后点击“Download”下载“keyes arm”APP。
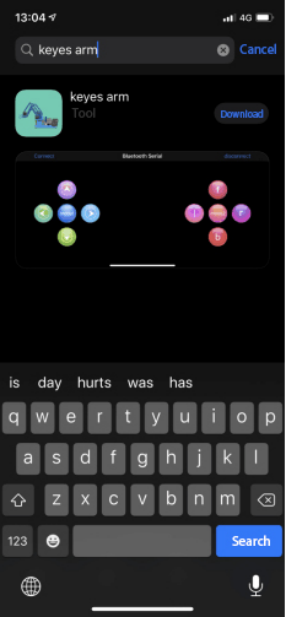
c.“keyes arm”APP的界面如下所示:
d.先开启手机/iPad的蓝牙,再打开App,点击“CONNECT”进行蓝牙搜索,在搜索结果中寻找“BCC micro:bit”对话框,在“BCC micro:bit”对话框中点击“connect”即可连接蓝牙。当对话框的“connect”变成“is connected”,说明蓝牙连接成功。
3. 准备:
(1)将Micro:bit主板正确插入Micro:bit 16路舵机扩展板。
(2)通过Micro USB线连接Micro:bit主板和电脑。
(3)连接好外接电源。
(4)打开离线版本或Web版本的Makecode。
如果选择通过导入 .Hex文件来加载项目,则无需手动添加蓝牙扩展库。
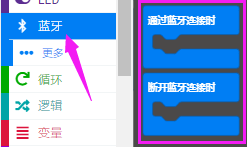
如果选择手动拖动代码,则首先需要添加蓝牙扩展库。点击右上角的齿轮图标(设置),接着点击“扩展”。进入库文件选择页面,在文本框输入“bluetooth”并点击搜索,出现“bluetooth”扩展库并点击“bluetooth”扩展库(如果界面有,就不需要通过搜索Bluetooth来找到),如下图所示:
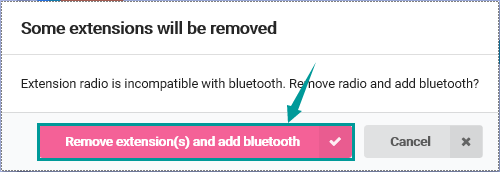
由于micro:bit的硬件原因,蓝牙和无线电不能同时工作,所以它们的扩展库互不兼容。安装蓝牙扩展库时,系统将提示您删除无线电扩展。只需确认移除就行。

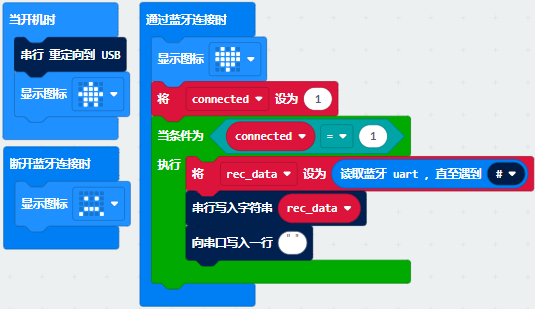
4.实验代码:
可以直接加载我们提供的程序,也可以自己通过拖动程序块来编写程序程序,操作步骤如下:
(1)寻找代码块


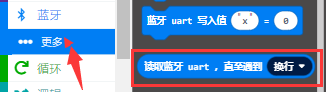


(2)完整代码程序
4.实验结果:
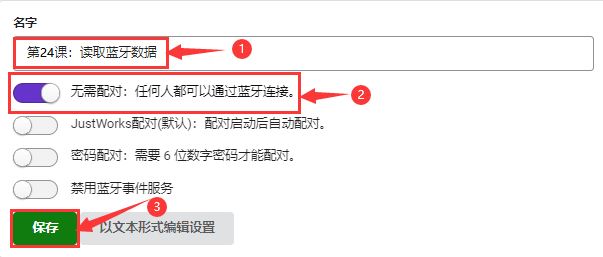
(1)实验代码编完之后需要设置,先点击右上角的齿轮图标 (设置),再单击“项目设定”,在文本框中输入“第18课:读取蓝牙数据”后,将“无需配对”设置为“打开”状态。(如果是直接导入实验代码的就不需要此操作,而自己拖动代码块编写实验代码的就需要此操作)
(设置),再单击“项目设定”,在文本框中输入“第18课:读取蓝牙数据”后,将“无需配对”设置为“打开”状态。(如果是直接导入实验代码的就不需要此操作,而自己拖动代码块编写实验代码的就需要此操作)

(2)设置完之后,按照之前的方式将实验代码下载到Micro:bit主板上,Micro USB线不要从Micro:bit主板上拔下来,利用Micro USB线上电。
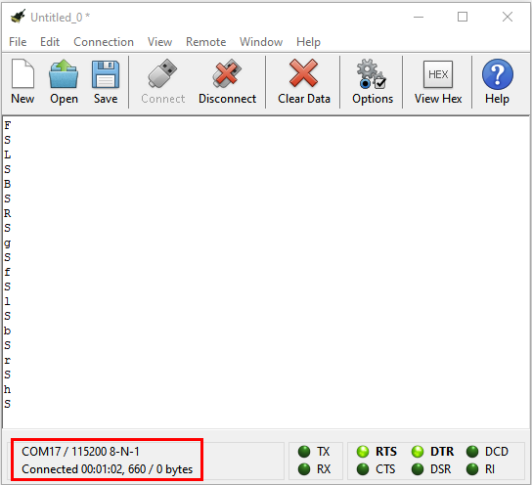
(3)由于实验代码原因,在MakeCode编辑器中不会出现的“显示控制台设备”,所以读取不了APP界面上各按钮发送的控制字符,这里需要使用CoolTerm程序来读取APP界面上各按钮发送的控制字符。打开CoolTerm,点击Options,选择SerialPort,设置COM口和波特率,波特率设置为115200(经过测试,micro:bit的USB串口通讯波特率是115200),点击OK后,最后点击Connect。这样,对准micro:bit主板按下Android(或iOS)系统手机/平板上APP界面上的各按钮(控件),可以看到CoolTerm串口监视器显示出蓝牙APP界面上各按钮(控件)对应的控制字符,如下图。
经过测试,我们得出了手机/ipad 蓝牙APP上各个按钮(控件)对应的功能,如下图:


第19课 蓝牙控制4自由度机械手臂#

1.实验说明:
在上一课程中,我们已经介绍了蓝牙APP的使用和各按钮的功能,并且通过蓝牙APP连接Micro:bit上的蓝牙来读取了APP界面上各按钮发送的控制字符,在本课程中,主要是通过蓝牙APP连接Micro:bit上的蓝牙实现APP控制4自由度机械手臂的多种功能。
2. 实验接线:
舵机1(右侧舵机) |
Micro:bit 16路舵机扩展板 |
|---|---|
棕线 |
G |
红线 |
V |
橙线 |
S(4) |
舵机2(底座转动舵机) |
Micro:bit 16路舵机扩展板 |
|---|---|
棕线 |
G |
红线 |
V |
橙线 |
S(5) |
舵机3(爪子处舵机) |
Micro:bit 16路舵机扩展板 |
|---|---|
棕线 |
G |
红线 |
V |
橙线 |
S(6) |
舵机4(左侧舵机) |
Micro:bit 16路舵机扩展板 |
|---|---|
棕线 |
G |
红线 |
V |
橙线 |
S(7) |
3. 准备:
(1)将Micro:bit主板正确插入Micro:bit 16路舵机扩展板。
(2)通过Micro USB线连接Micro:bit主板和电脑。
(3)连接好外接电源。
(4)打开离线版本或Web版本的Makecode。
如果选择通过导入文件夹中的 .Hex文件来加载项目,则无需手动添加蓝牙扩展库和pca9685扩展库。
如果选择手动拖动代码,则首先需要添加蓝牙扩展库和pca9685扩展库。
4.实验代码:
(1)添加库文件
特别提醒:如果已经添加好了库文件,此步骤直接跳过。
打开MakeCode,先点击右上角的齿轮图标(设置),再点击“扩展”。
或者单击“高级”上的“扩展”。
进入库文件选择页面,在文本框输入“bluetooth”并点击搜索,出现“bluetooth”扩展库并点击“bluetooth”扩展库(如果界面有,就不需要通过搜索Bluetooth来找到),如下图所示:
由于micro:bit的硬件原因,蓝牙和无线电不能同时工作,所以它们的扩展库互不兼容。安装蓝牙扩展库时,系统将提示您删除无线电扩展。只需确认移除就行。

这样,蓝牙扩展库就添加好了,接着添加pca9685扩展库。
打开MakeCode,先点击右上角的齿轮图标(设置),再点击“扩展”。
或者单击“高级”上的“扩展”。
在搜索框中输入链接:https://github.com/keyestudio2019/pxt-pca9685-smallest,然后单击搜索。
单击搜索结果pca9685以下载并安装。 该过程可能需要几秒钟。
安装完成后,你可以在左侧找到pca9685的扩展库。
注意:添加到项目中的扩展库仅对该项目有效,而不会出现在其他项目中。 因此,当你创建新项目代码时,需要再次添加pca9685扩展库。
(2)实验代码
由于这个代码程序比较复杂,步骤比较多,这里我们就不提供编写代码程序的详细操作步骤,如果你自己有兴趣的话,可以自己拖动代码块来操作下。
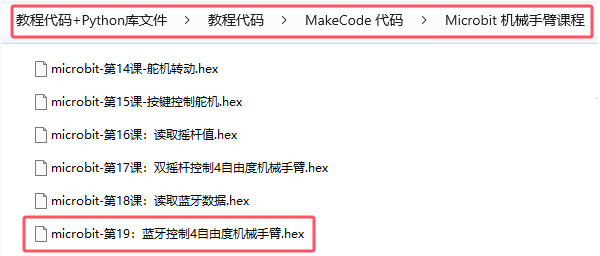
我们提供编写好的代码程序,请打开我们提供的示例代码“第19课:蓝牙控制4自由度机械手臂.hex”查看,如下图位置:
5.实验结果:
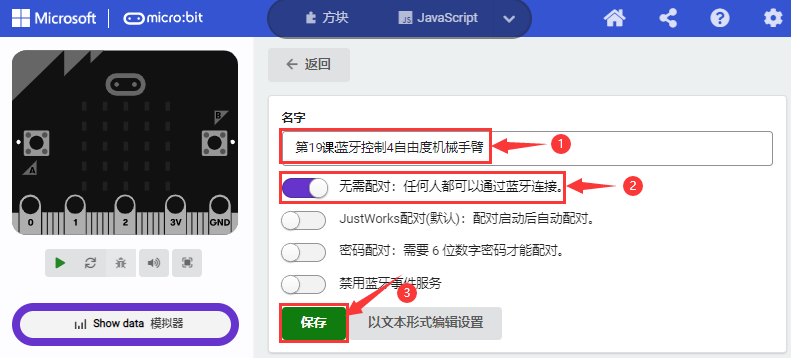
(1)实验代码编完之后需要设置,先点击右上角的齿轮图标(设置),再单击“项目设定”,在文本框中输入“第19课:蓝牙控制4自由度机械手臂”后,将“无需配对”设置为“打开”状态。(如果是直接导入实验代码的就不需要此操作,而自己拖动代码块编写实验代码的就需要此操作)
(2)设置完之后,按照之前的方式将实验代码下载到Micro:bit主板上,外接电源,之后打开手机/ipad应用程序“keyes arm”APP,然后按照前面的方法(参照 第18课 读取蓝牙数据)完成蓝牙连接,那你就可以操作“keyes arm”APP页面上的按钮(控件)来控制4自由度机械手臂自由工作。
注意:经过测试,我们已经得出了手机/ipad 蓝牙APP上各个按钮(控件)对应的功能,如下图: