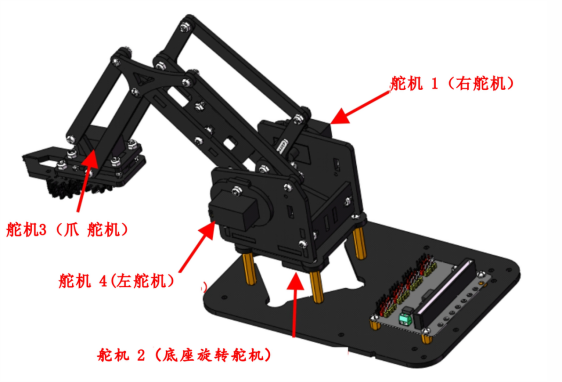
组装4自由度机械手臂#
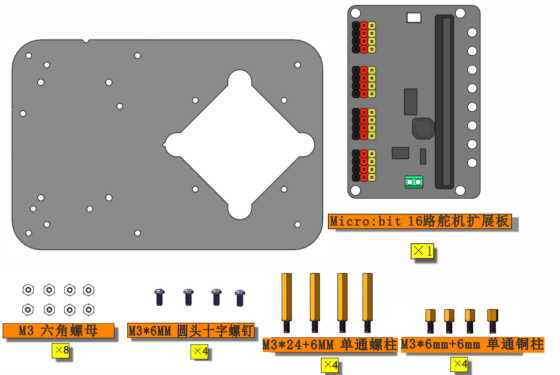
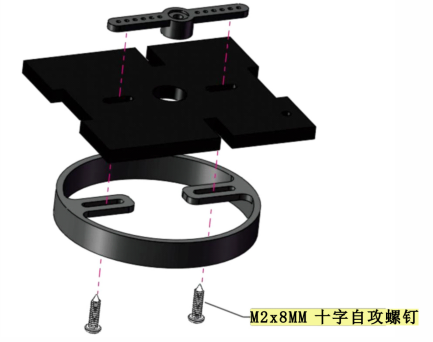
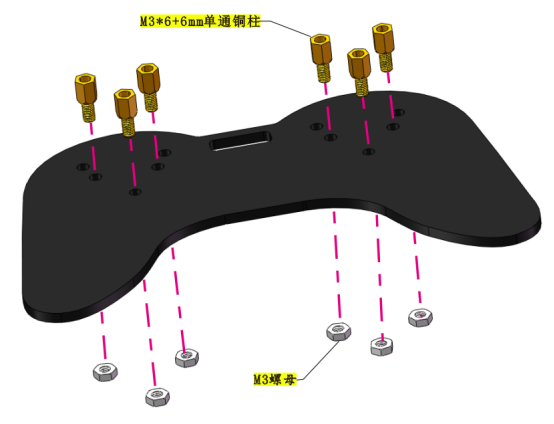
底座部分—安装1
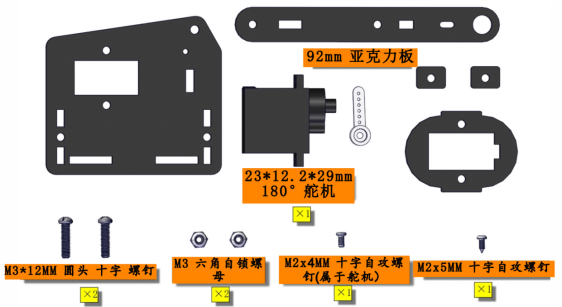
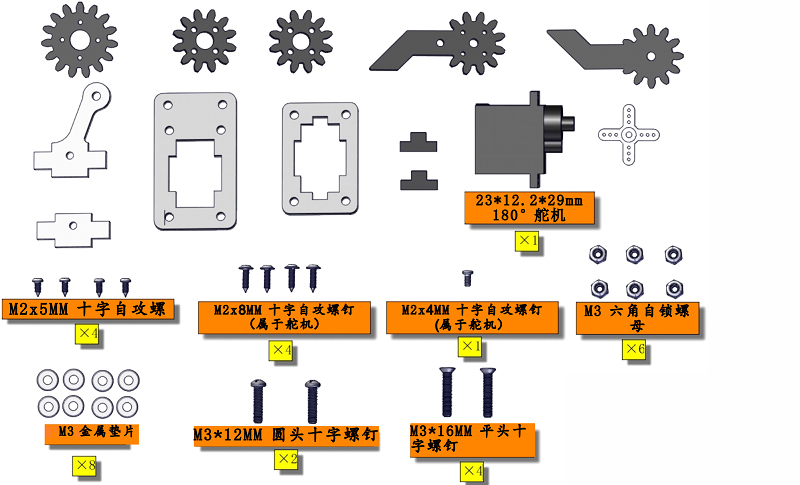
安装所需零件:
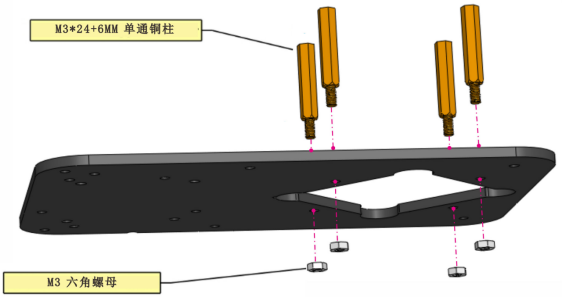
安装:
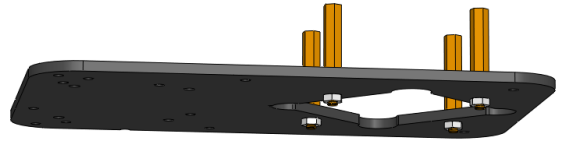
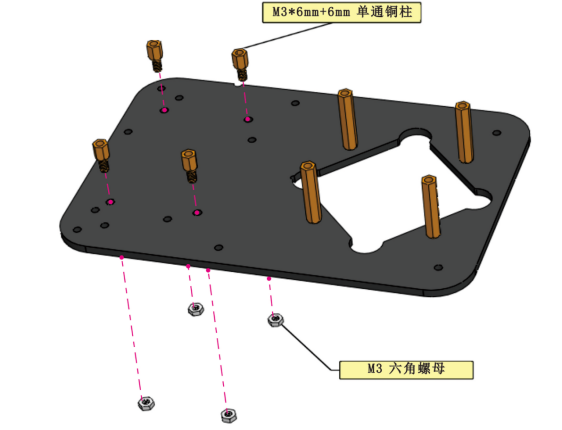
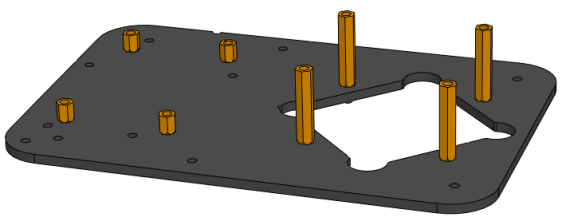
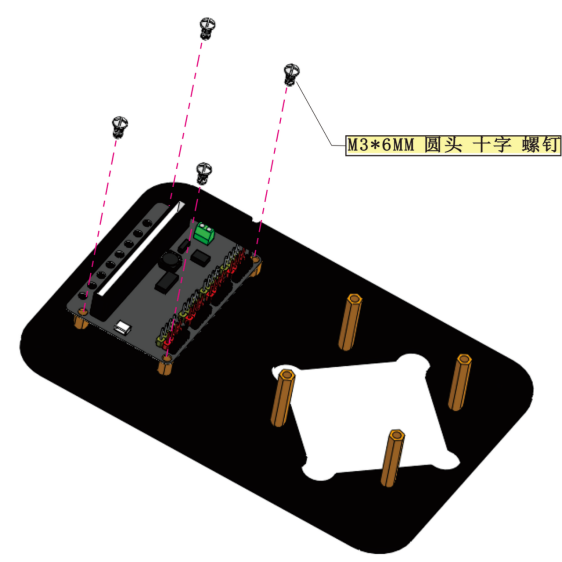
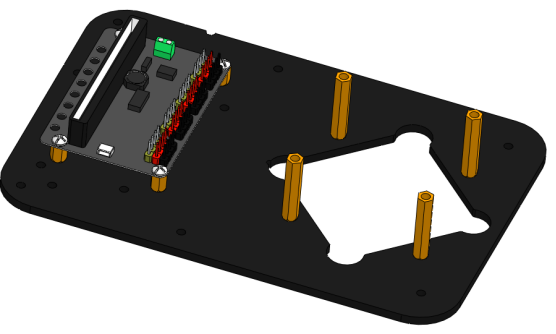
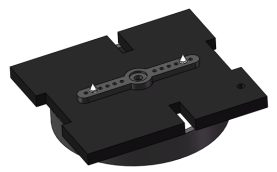
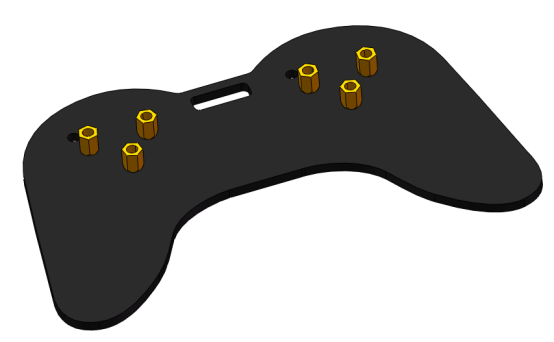
完成:
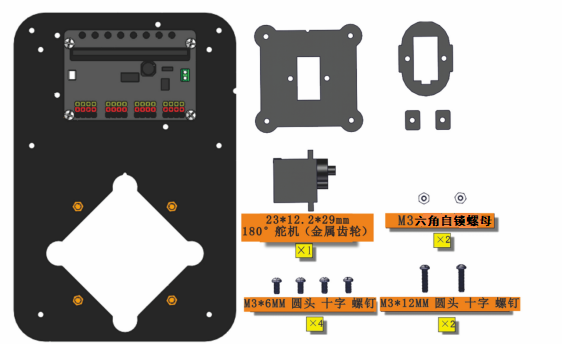
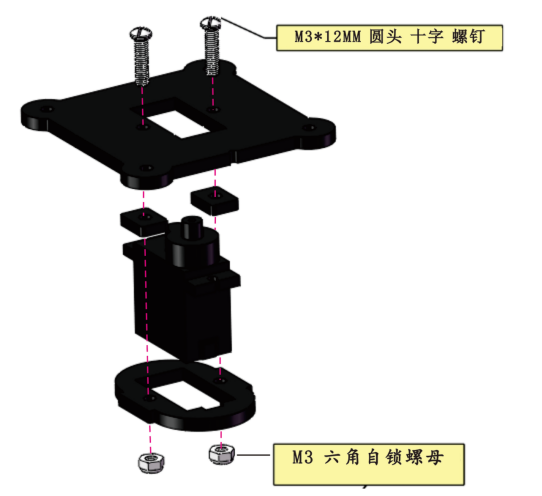
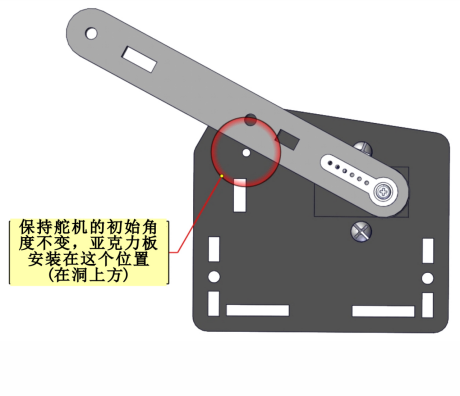
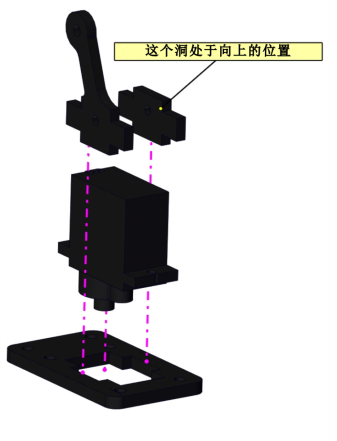
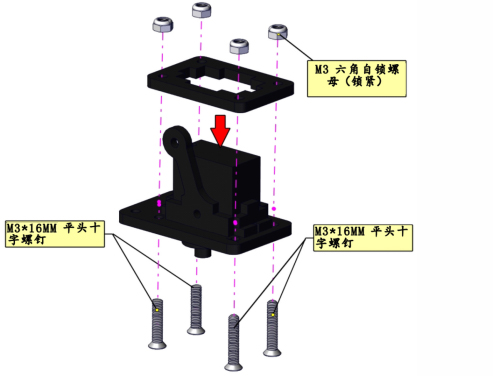
底座舵机部分—安装2
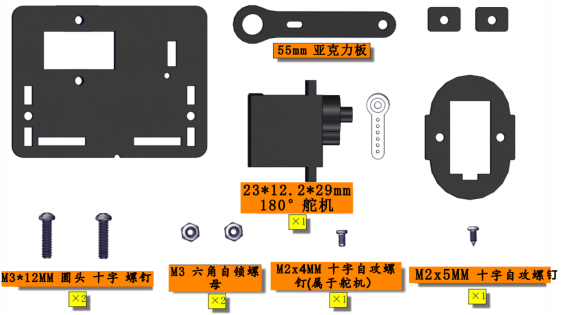
安装所需零件:
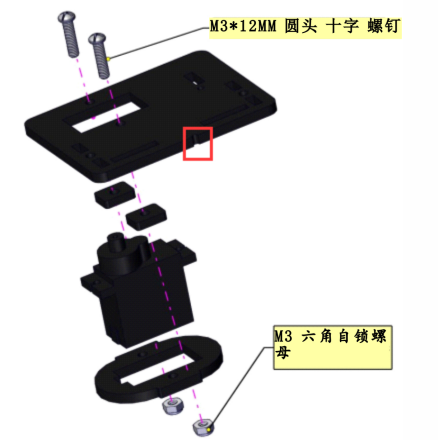
安装:
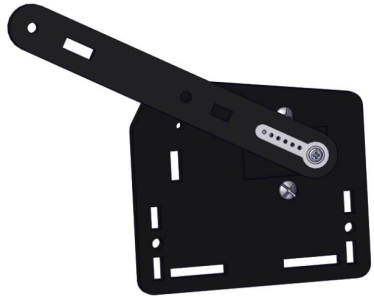
完成:
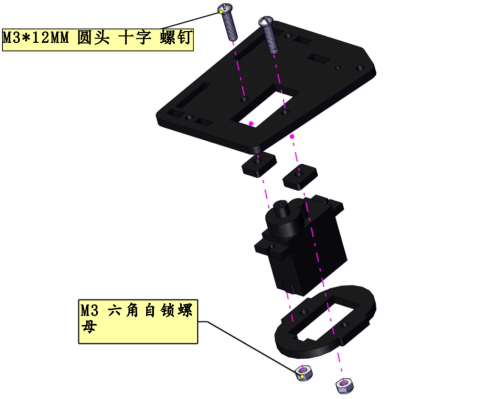
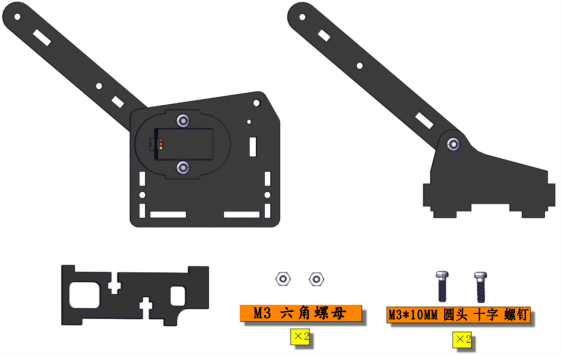
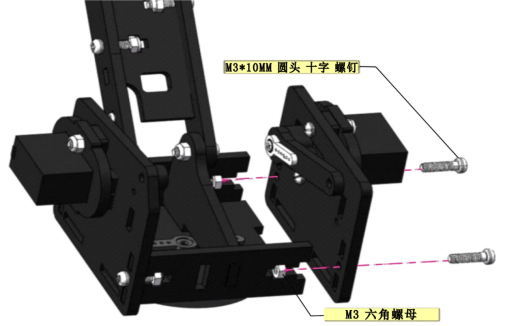
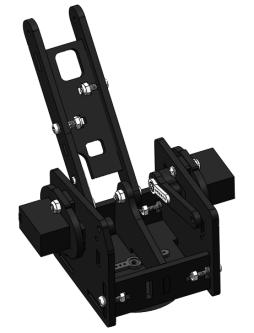
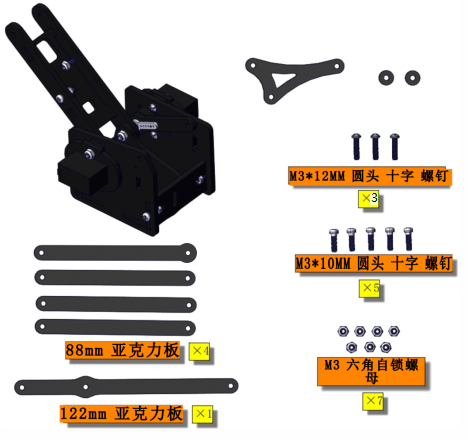
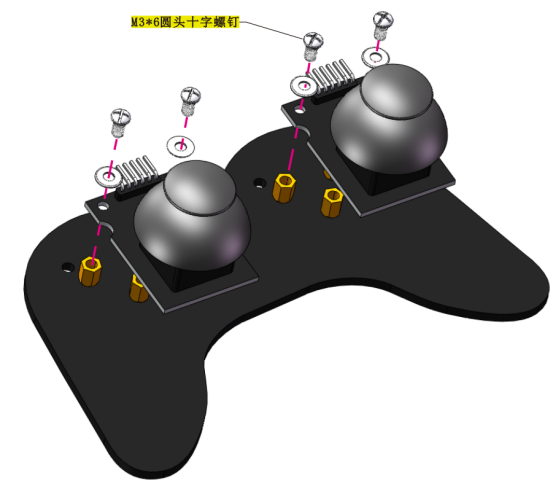
左侧部分(左板+左侧舵机)—安装3
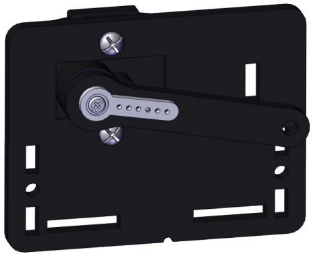
安装所需零件:
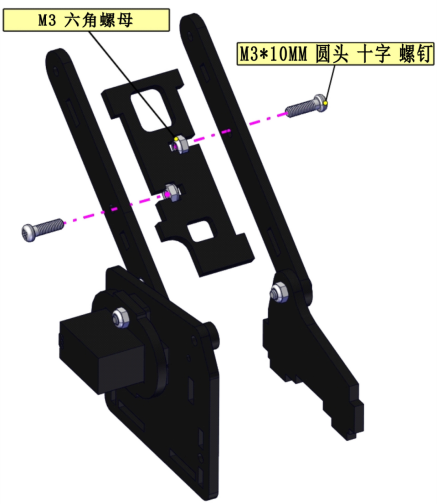
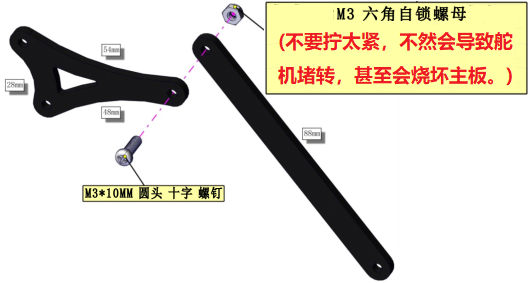
安装:

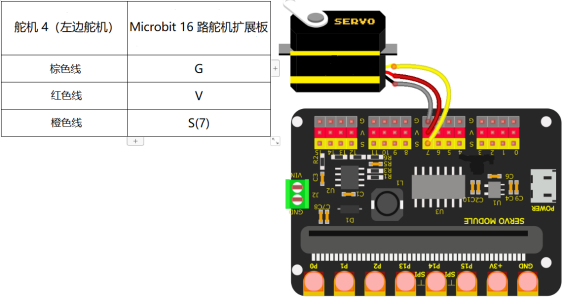
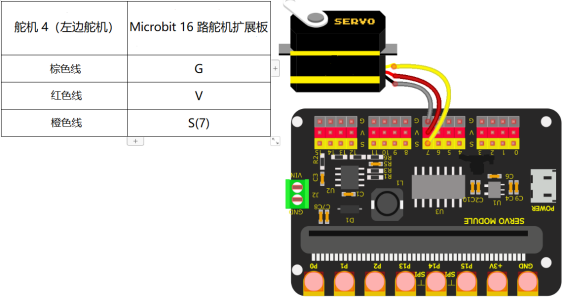
舵机4(左侧舵机)初始化: (注意:舵机安装前必须进行初始化,否则安装后导入代码很容易导致舵机卡死)
安装前需要先设置舵机角度为 180°。设置舵机角度时,将舵机连接在Microbit 16路舵机扩展板的G、V、S(7),在Microbit主控板上上传对应代码,外接电源供电后,按下Microbit主控板上的复位按键,舵机就转到180°的位置。
方法1:MakeCode 代码
在编写代码并上传代码至主板之前,必须先安装 MakeCode IDE,安装 MakeCode IDE的说明请点击链接:MakeCode 开发环境配置
舵机4设置为180°的代码:
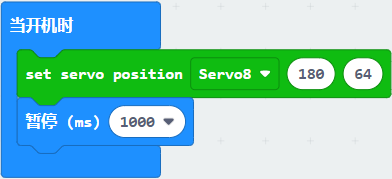
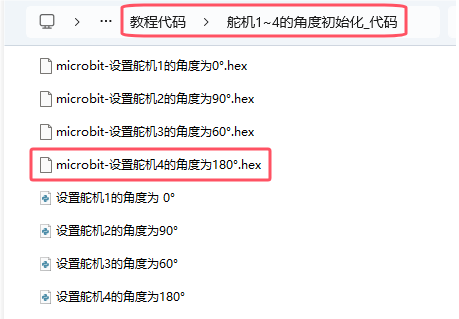
对应的代码在资料中也有提供,在文件夹 …\教程代码+Python库文件\教程代码\舵机1~4的角度初始化_代码 ,打开文件 microbit-设置舵机4的角度为180°.hex ,或者在MakeCode IDE中编写上述测试代码。烧录测试代码到Microbit主板中,上传完成后外接电源供电。代码如下图位置:
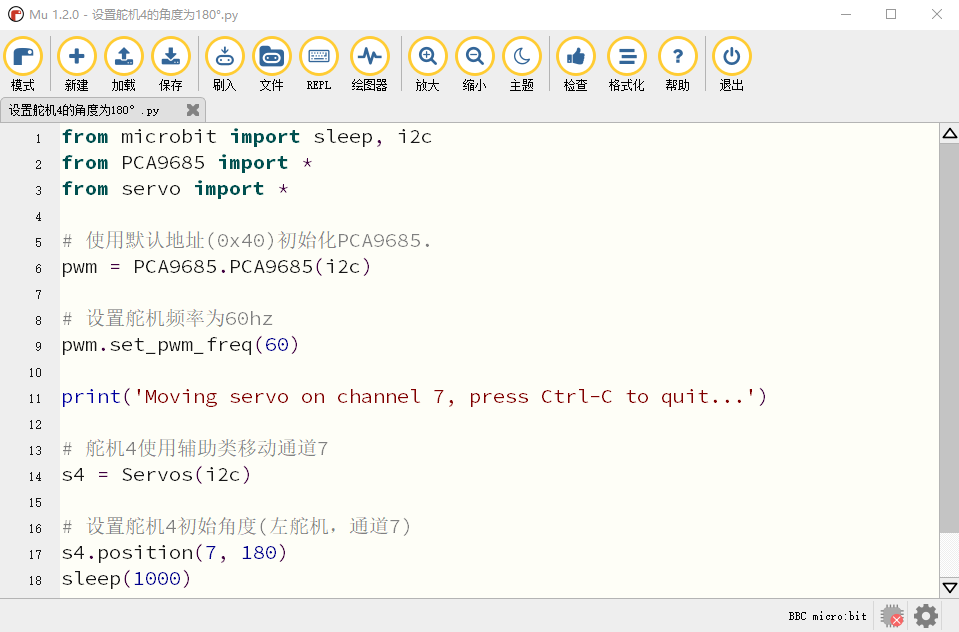
方法2:Python 代码
在编写代码并上传代码至主板之前,必须先安装 Mu 编译器,安装 MU 编译器 的说明请点击链接:Mu 编译器开发环境设置
舵机4设置为180°的代码:
from microbit import sleep, i2c
from PCA9685 import *
from servo import *
## 使用默认地址(0x40)初始化PCA9685.
pwm = PCA9685.PCA9685(i2c)
## 设置舵机频率为60hz
pwm.set_pwm_freq(60)
print('Moving servo on channel 7, press Ctrl-C to quit...')
## 舵机4使用辅助类移动通道7
s4 = Servos(i2c)
## 设置舵机4初始角度(左舵机,通道7)
s4.position(7, 180)
sleep(1000)
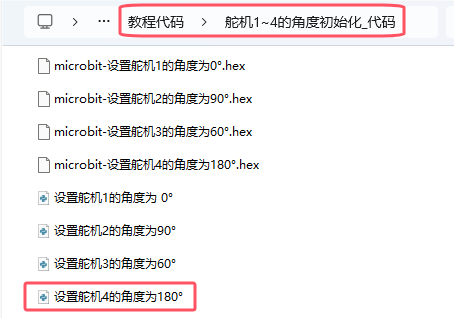
对应的代码在资料中也有提供,在文件夹 …\教程代码+Python库文件\教程代码\舵机1~4的角度初始化_代码 ,打开文件 设置舵机4的角度为180°.py ,或者复制并粘贴上述测试代码到 MU 编译器中。烧录测试代码到Microbit主板中,上传完成后外接电源供电。代码如下图位置:
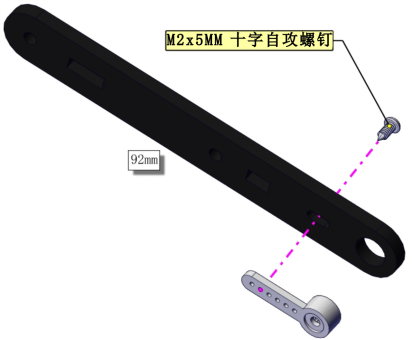
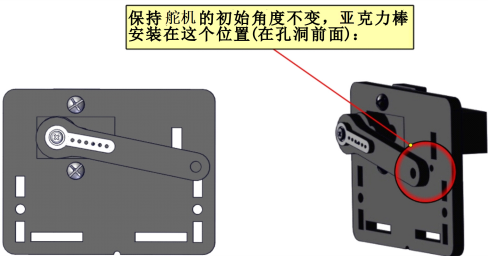
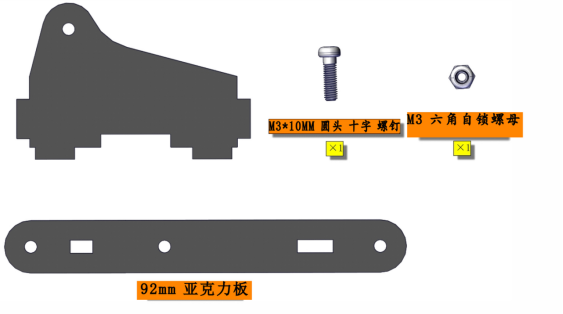
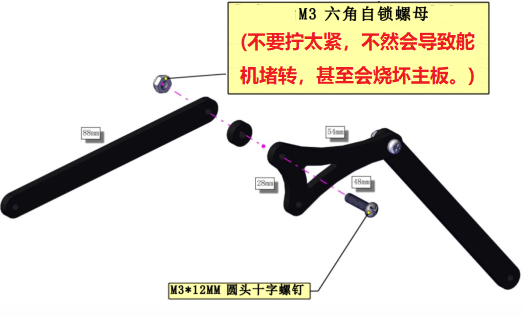
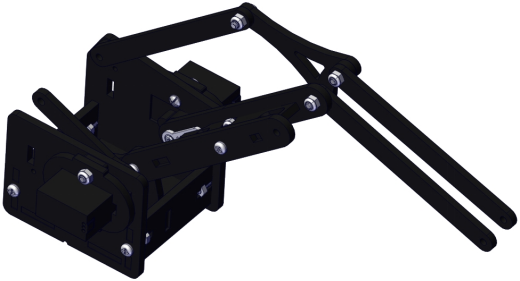
安装摆臂:

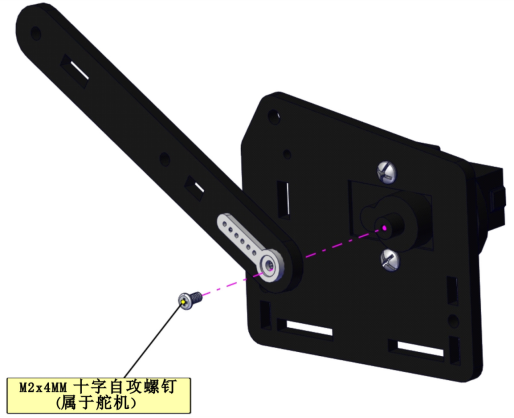
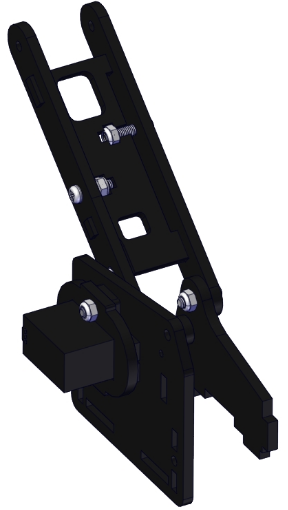
完成:
右侧部分(右板+右侧舵机)—安装4
安装所需零件:
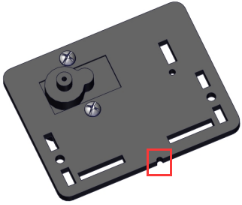
安装:
(注意亚克力板上的缺口方向)
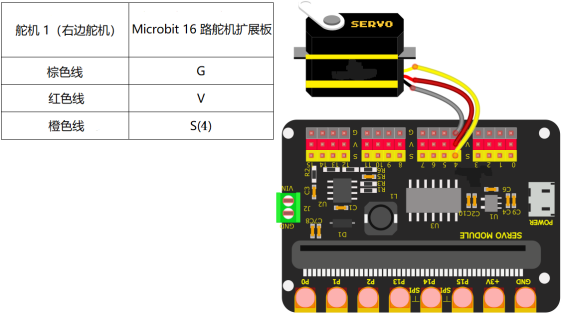
舵机1(右侧舵机)初始化: (注意:舵机安装前必须进行初始化,否则安装后导入代码很容易导致舵机卡死)
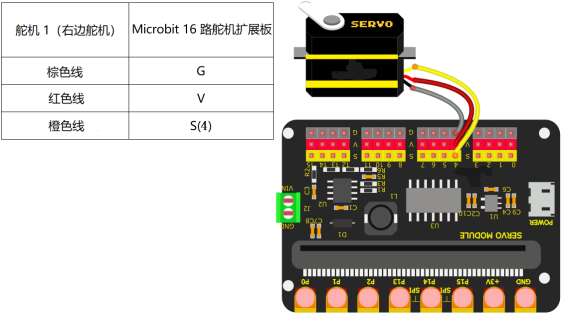
安装前需要先设置舵机角度为 0°。设置舵机角度时,将舵机连接在Microbit 16路舵机扩展板的G、V、S(4),在Microbit主控板上上传对应代码,外接电源供电后,按下Microbit主控板上的复位按键,舵机就转到0°的位置。
方法1:MakeCode 代码
舵机1设置为0°的代码:
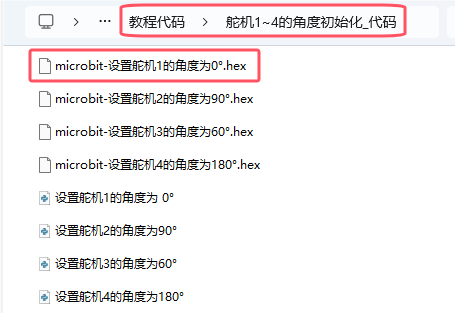
对应的代码在资料中也有提供,在文件夹 …\教程代码+Python库文件\教程代码\舵机1~4的角度初始化_代码 ,打开文件 microbit-设置舵机1的角度为0°.hex ,或者在MakeCode IDE中编写上述测试代码中。烧录测试代码到Microbit主板中,上传完成后外接电源供电。代码如下图位置:
方法2:Python 代码
舵机1设置为0°的代码:
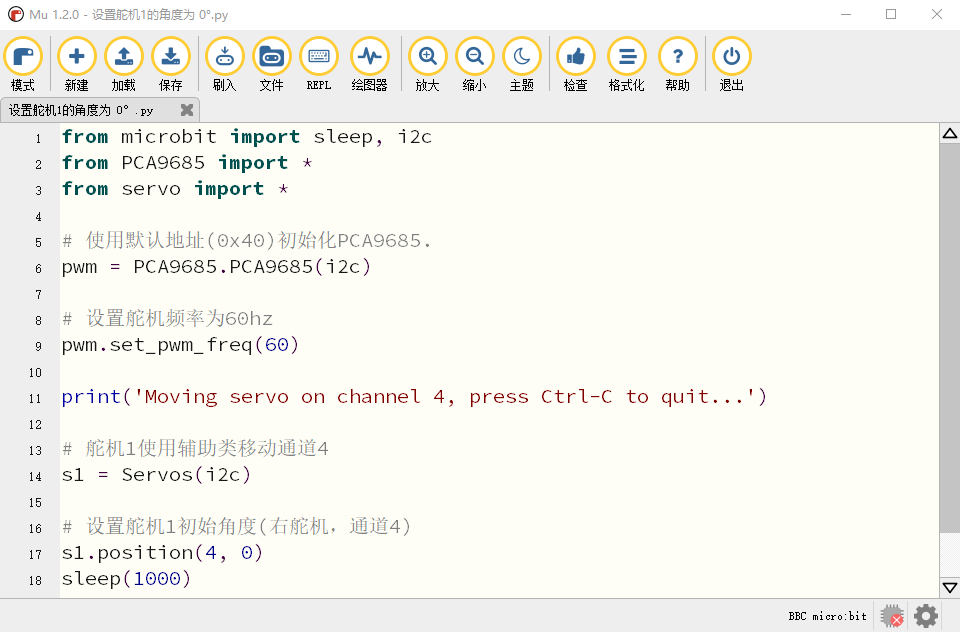
from microbit import sleep, i2c
from PCA9685 import *
from servo import *
## 使用默认地址(0x40)初始化PCA9685.
pwm = PCA9685.PCA9685(i2c)
## 设置舵机频率为60hz
pwm.set_pwm_freq(60)
print('Moving servo on channel 4, press Ctrl-C to quit...')
## 舵机1使用辅助类移动通道4
s1 = Servos(i2c)
## 设置舵机1初始角度(右舵机,通道4)
s1.position(4, 0)
sleep(1000)
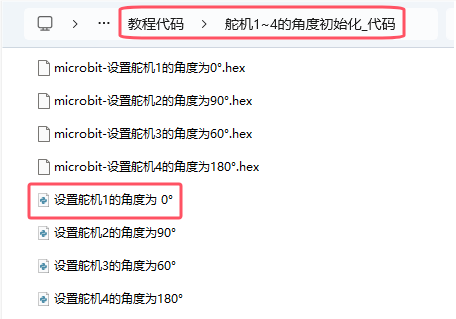
对应的代码在资料中也有提供,在文件夹 …\教程代码+Python库文件\教程代码\舵机1~4的角度初始化_代码 ,打开文件 设置舵机1的角度为0°.py ,或者复制并粘贴上述测试代码到 MU 编译器中。烧录测试代码到Microbit主板中,上传完成后外接电源供电。代码如下图位置:
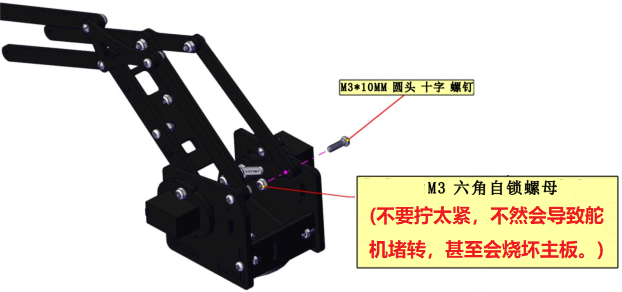
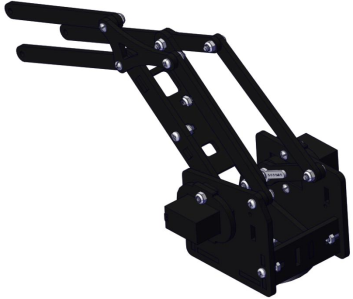
安装摆臂:
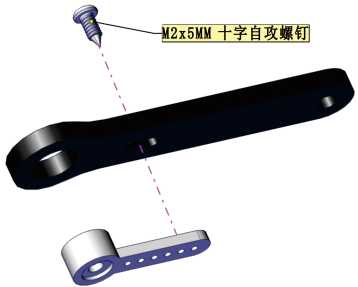

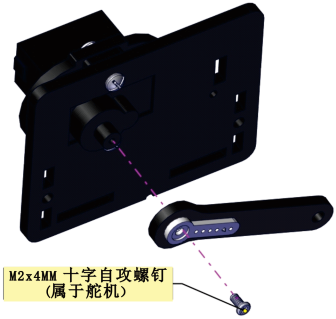
完成:
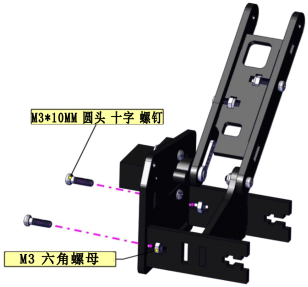
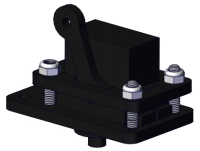
支架部分—安装5
安装所需零件:
安装:
完成:

左侧部分+支架部分—安装6
安装所需零件:
安装:
完成:
第6步+第4步(右侧部分)+圆柱支撑台—安装7
安装所需零件:
安装:
(注意圆柱支撑台的安装方向)



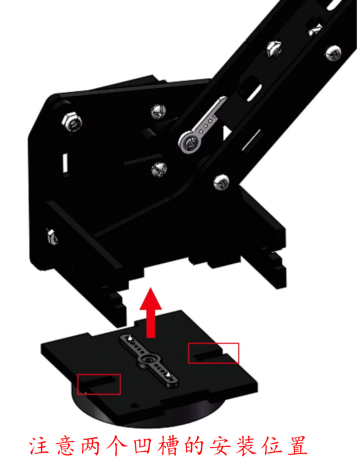

完成:
中间部分—安装8
安装所需零件:
安装:








完成:
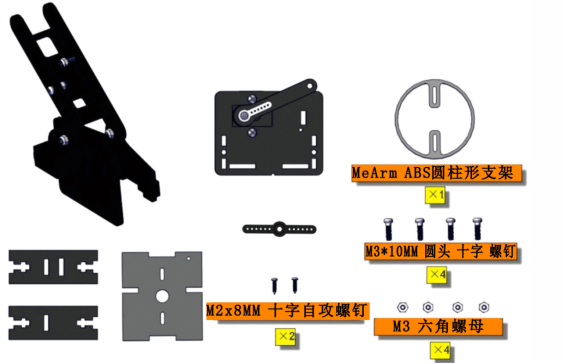
爪子部分(包括舵机)—安装9
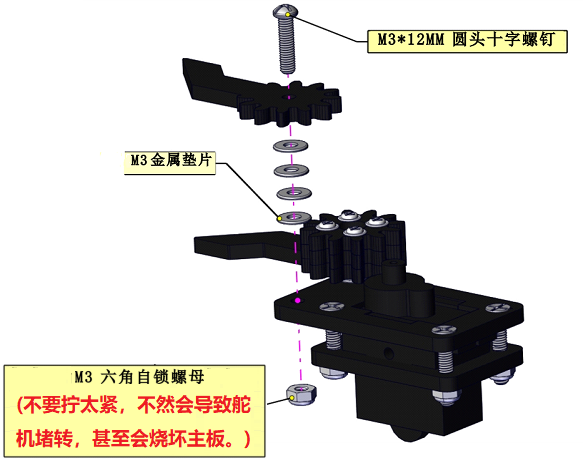
安装所需零件:
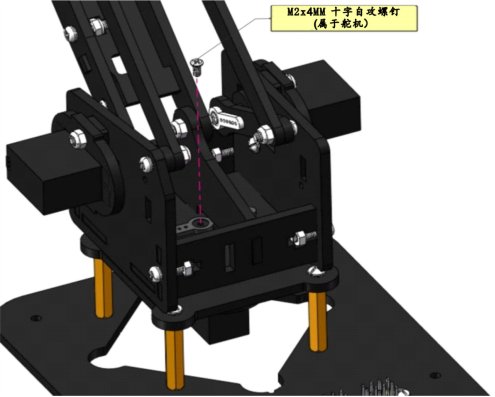
安装:



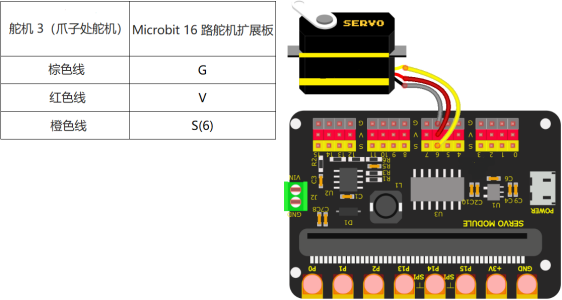
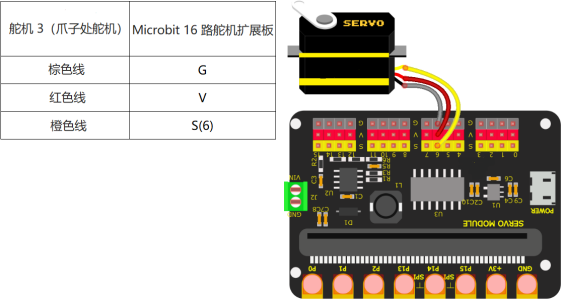
舵机3(爪子处舵机)初始化: (注意:舵机安装前必须进行初始化,否则安装后导入代码很容易导致舵机卡死)
安装前需要先设置舵机角度为60°。设置舵机角度时,将舵机连接在Microbit 16路舵机扩展板的G、V、S(6),在Microbit主控板上上传对应代码,外接电源供电后,按下Microbit主控板上的复位按键,舵机就转到60°的位置。
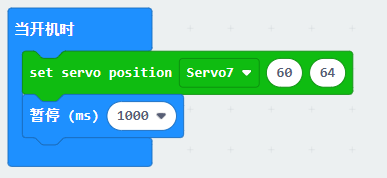
方法1:MakeCode 代码
舵机3设置为60°的代码:
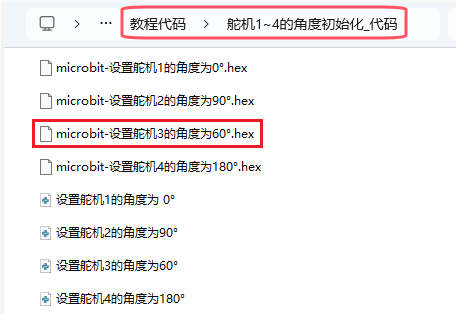
对应的代码在资料中也有提供,在文件夹 …\教程代码+Python库文件\教程代码\舵机1~4的角度初始化_代码 ,打开文件 microbit-设置舵机3的角度为60°.hex ,或者在MakeCode IDE中编写上述测试代码中。烧录测试代码到Microbit主板中,上传完成后外接电源供电。代码如下图位置:
方法2:Python 代码
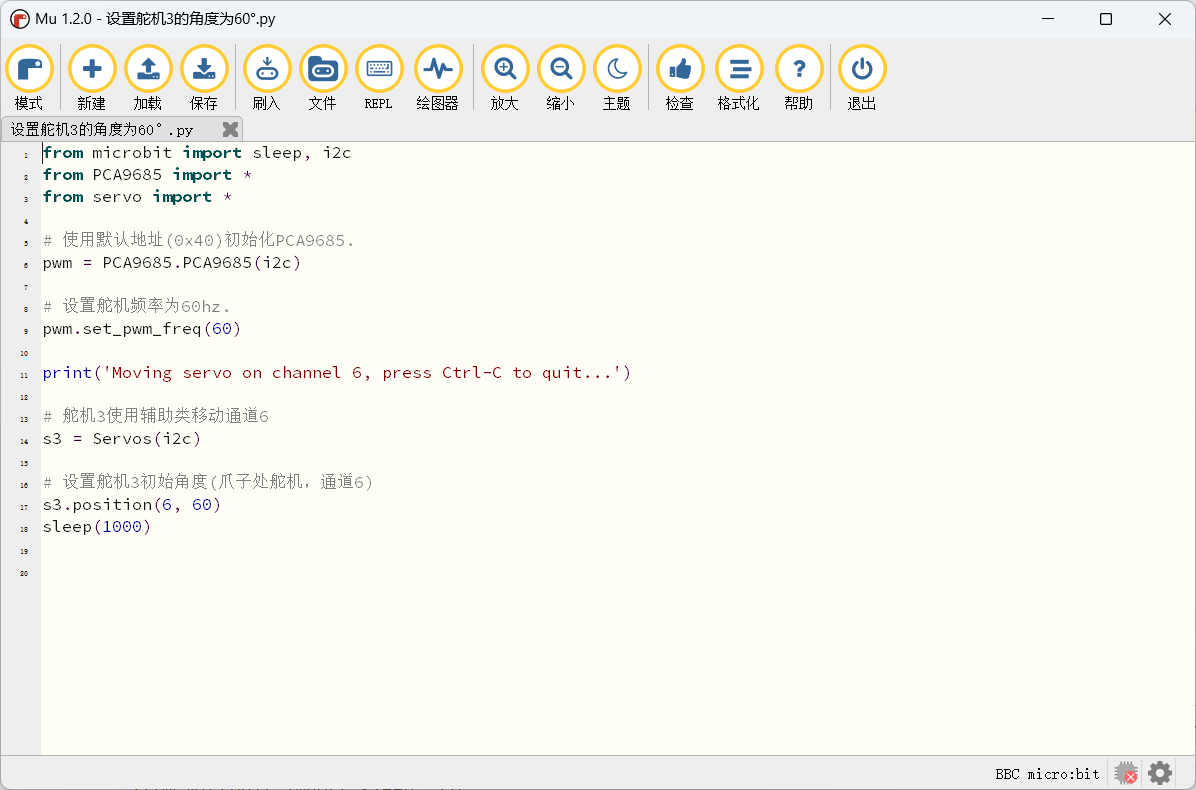
舵机3设置为60°的代码:
from microbit import sleep, i2c
from PCA9685 import *
from servo import *
## 使用默认地址(0x40)初始化PCA9685.
pwm = PCA9685.PCA9685(i2c)
## 设置舵机频率为60hz.
pwm.set_pwm_freq(60)
print('Moving servo on channel 6, press Ctrl-C to quit...')
## 舵机3使用辅助类移动通道6
s3 = Servos(i2c)
## 设置舵机3初始角度(爪子处舵机,通道6)
s3.position(6, 60)
sleep(1000)
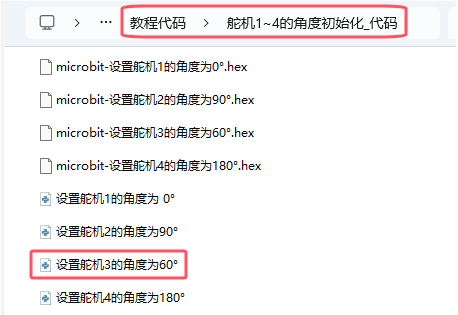
对应的代码在资料中也有提供,在文件夹 …\教程代码+Python库文件\教程代码\舵机1~4的角度初始化_代码 ,打开文件 设置舵机3的角度为60°.py ,或者复制并粘贴上述测试代码到 MU 编译器中。烧录测试代码到Microbit主板中,上传完成后外接电源供电。代码如下图位置:
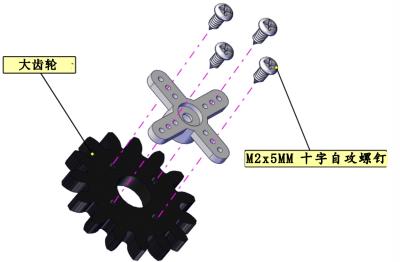
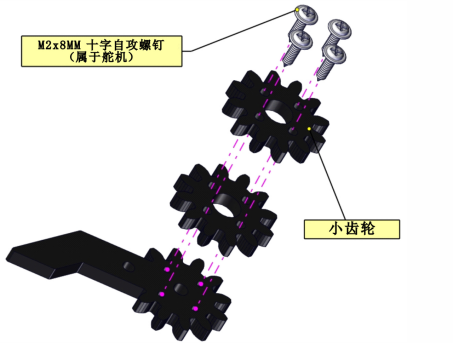
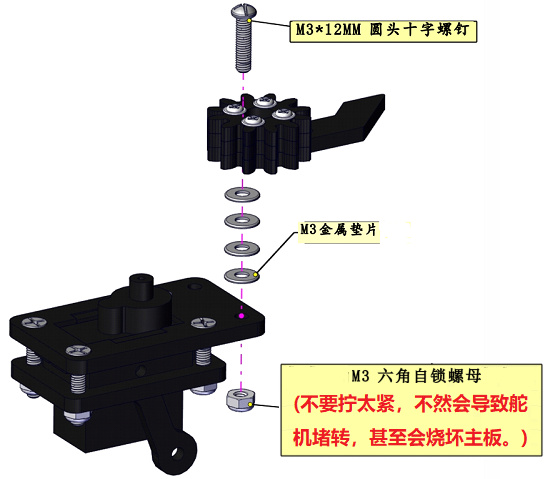
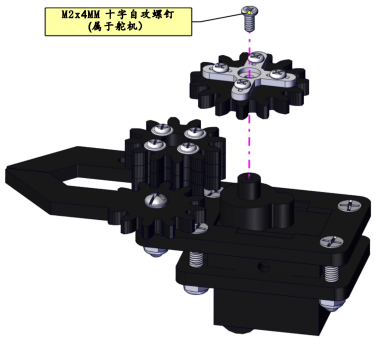
安装齿轮:
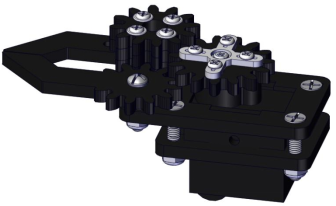
完成:
将上面安装好的部分相互组合—安装10
安装准备零件:

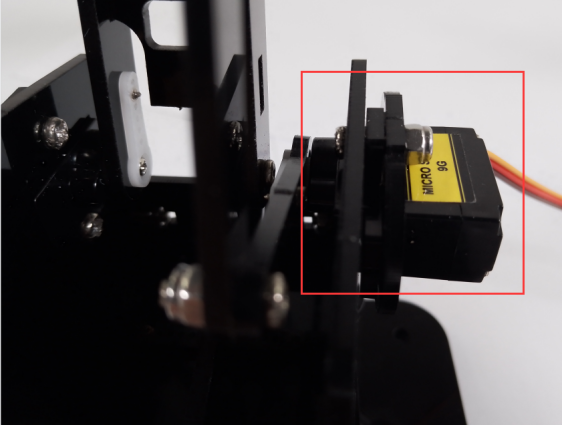
安装:


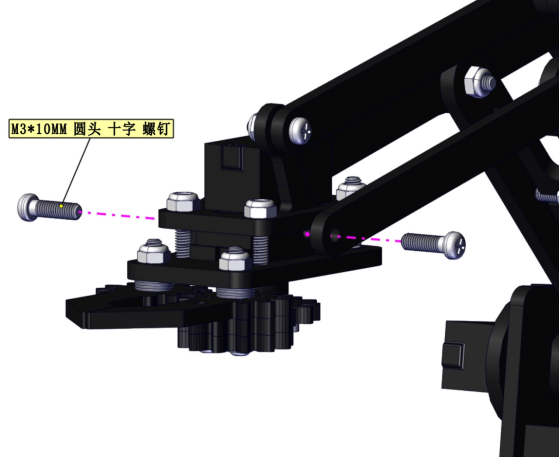

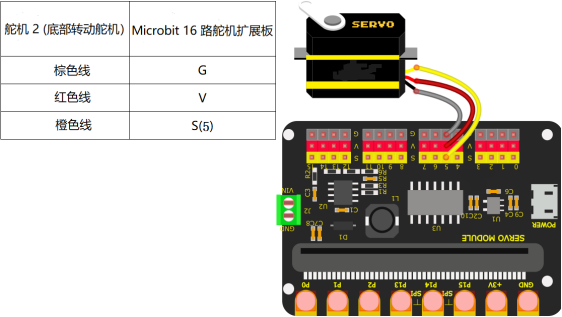
舵机2(底座转动舵机)初始化: (注意:舵机安装前必须进行初始化,否则安装后导入代码很容易导致舵机卡死)
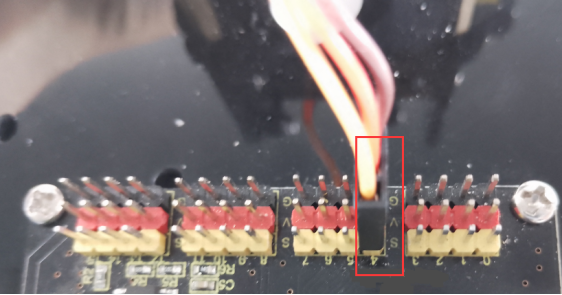
安装前需要先设置舵机角度为90°。设置舵机角度时,将舵机连接在Microbit 16路舵机扩展板的G、V、S(5),在Microbit主控板上上传对应代码,外接电源供电后,按下Microbit主控板上的复位按键,舵机就转到90°的位置。
方法1:MakeCode 代码
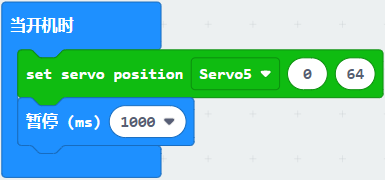
舵机2设置为90°的代码:
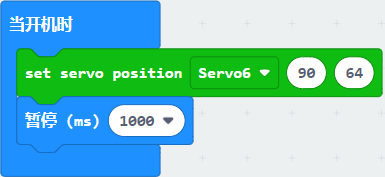
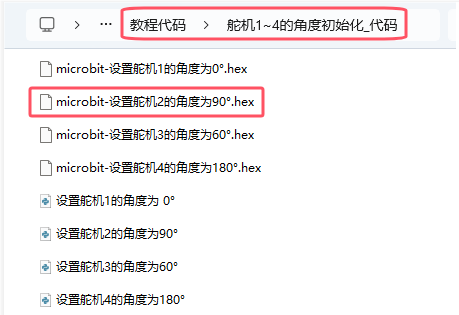
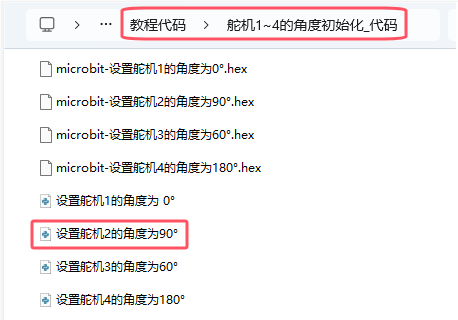
对应的代码在资料中也有提供,在文件夹 …\教程代码+Python库文件\教程代码\舵机1~4的角度初始化_代码 ,打开文件 microbit-设置舵机2的角度为90°.hex ,或者在MakeCode IDE中编写上述测试代码中。烧录测试代码到Microbit主板中,上传完成后外接电源供电。代码如下图位置:
方法2:Python 代码
舵机2设置为90°的代码:

from microbit import sleep, i2c
from PCA9685 import *
from servo import *
## 使用默认地址(0x40)初始化PCA9685..
pwm = PCA9685.PCA9685(i2c)
## 设置舵机频率为60hz
pwm.set_pwm_freq(60)
print('Moving servo on channel 5, press Ctrl-C to quit...')
## 舵机2使用辅助类移动通道5
s2 = Servos(i2c)
##设置舵机2初始角度(底座旋转舵机,通道5)
s2.position(5, 90)
sleep(1000)
对应的代码在资料中也有提供,在文件夹 …\教程代码+Python库文件\教程代码\舵机1~4的角度初始化_代码 ,打开文件 设置舵机2的角度为90°.py ,或者复制并粘贴上述测试代码到 MU 编译器中。烧录测试代码到Microbit主板中,上传完成后外接电源供电。代码如下图位置:
安装机械臂:

完成:
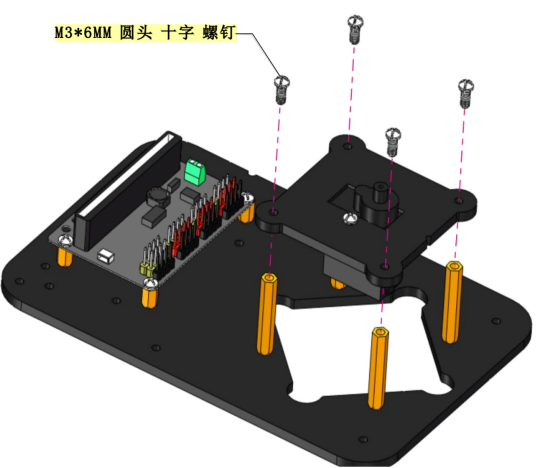
机械手臂控制部分—安装11
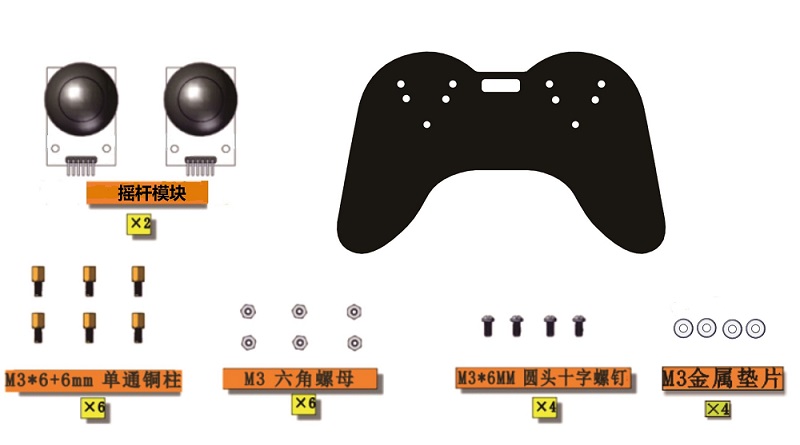
安装准备零件:
安装:
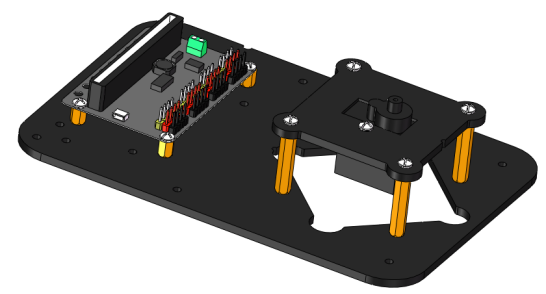
完成:

接线和安装microbit主板
舵机1(右侧舵机):
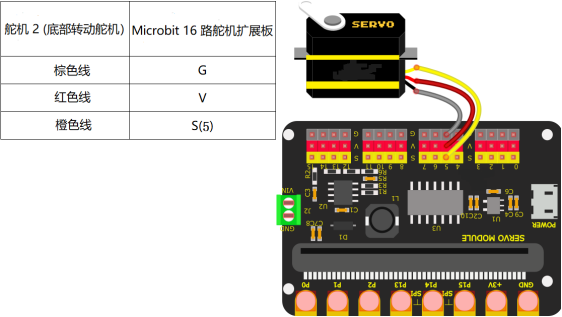
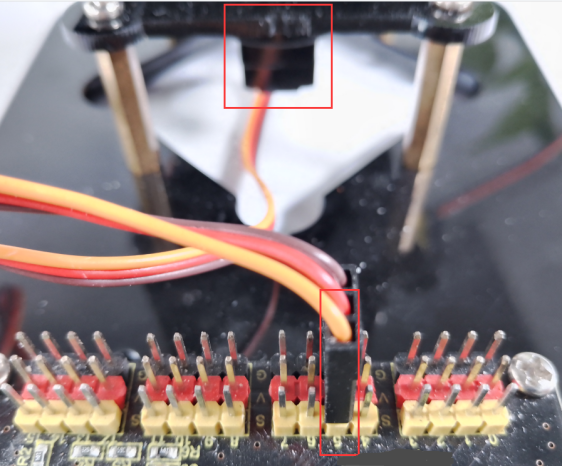
舵机2(底座转动舵机):
舵机3(爪子处舵机):
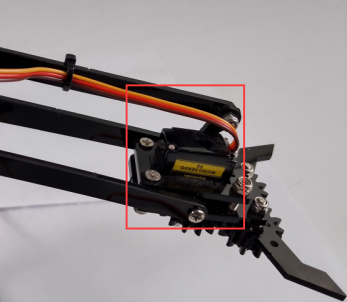
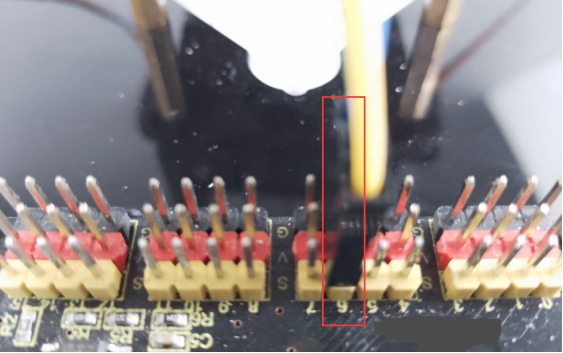
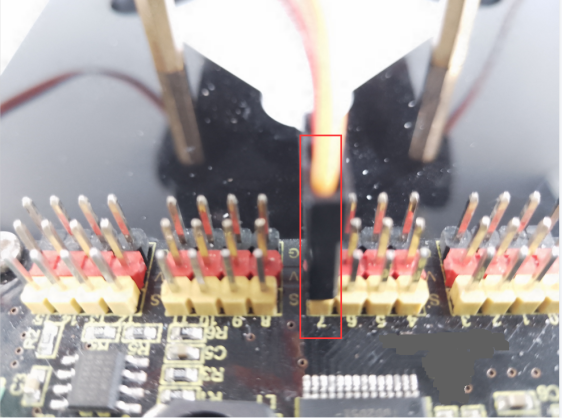
注意:由于这里舵机线不能直接连接到microbit16路舵机扩展板上的引脚,需要使用3根杜邦线将舵机线连接到microbit16路舵机扩展板上的引脚。
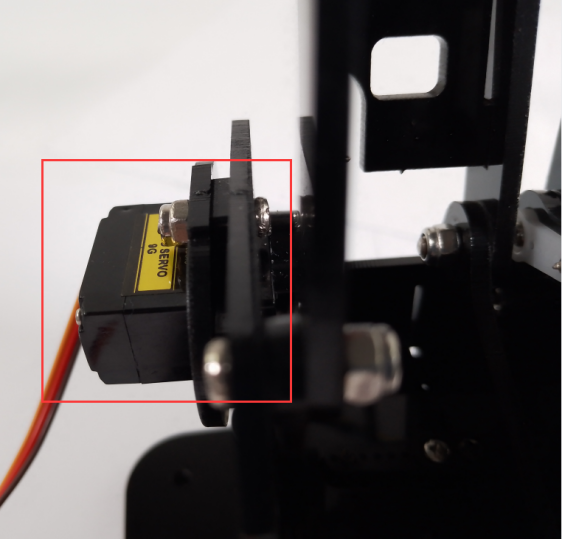
舵机4(左侧舵机):
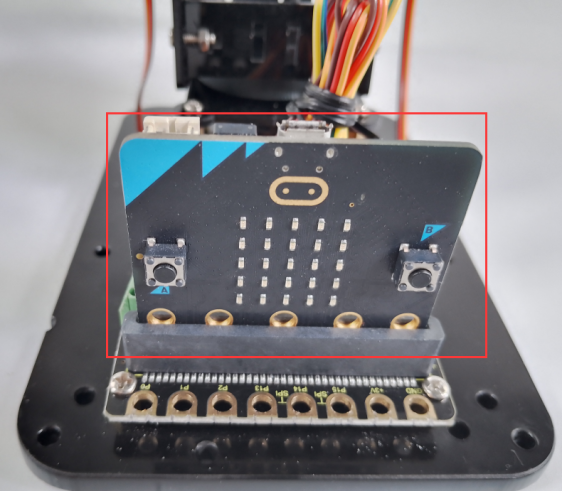
插上microbit主板:
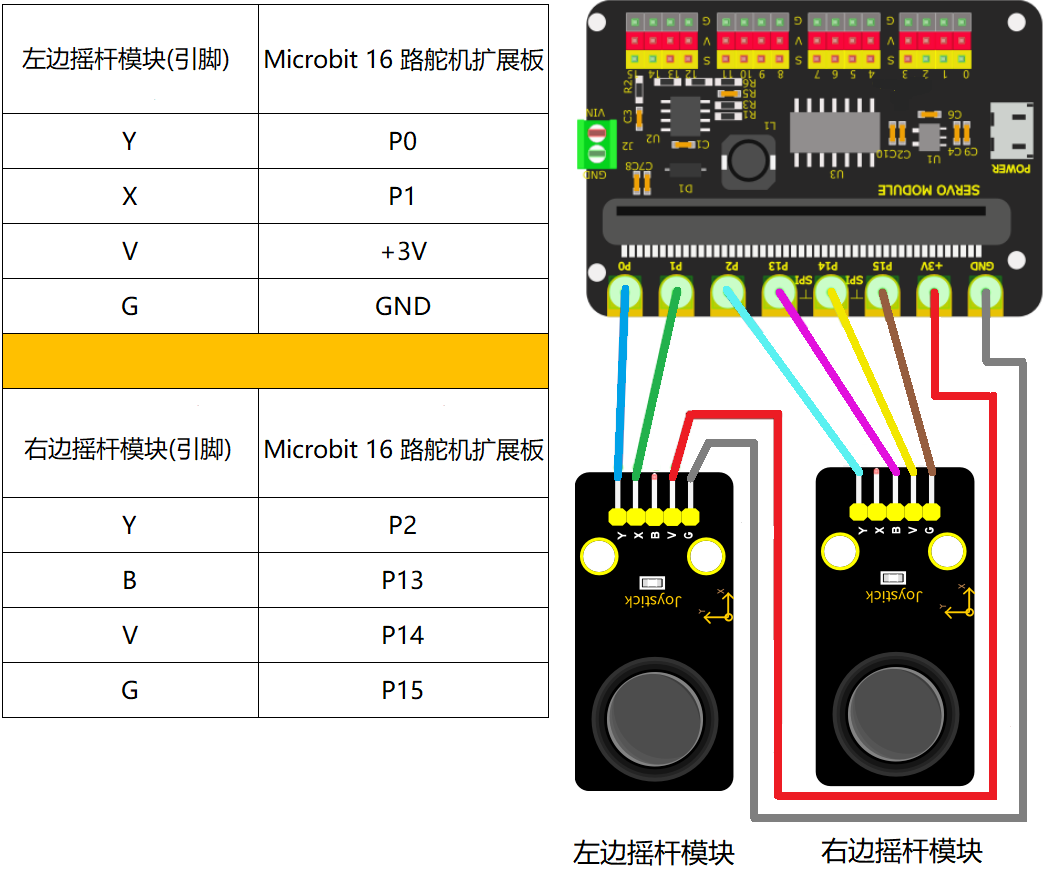
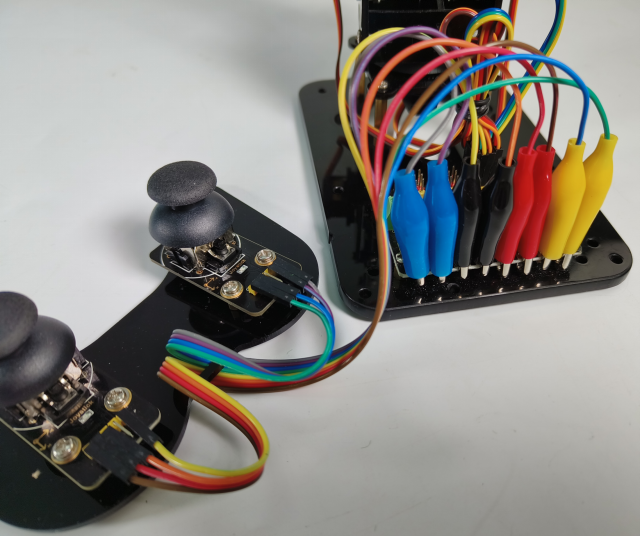
左、右摇杆模块:
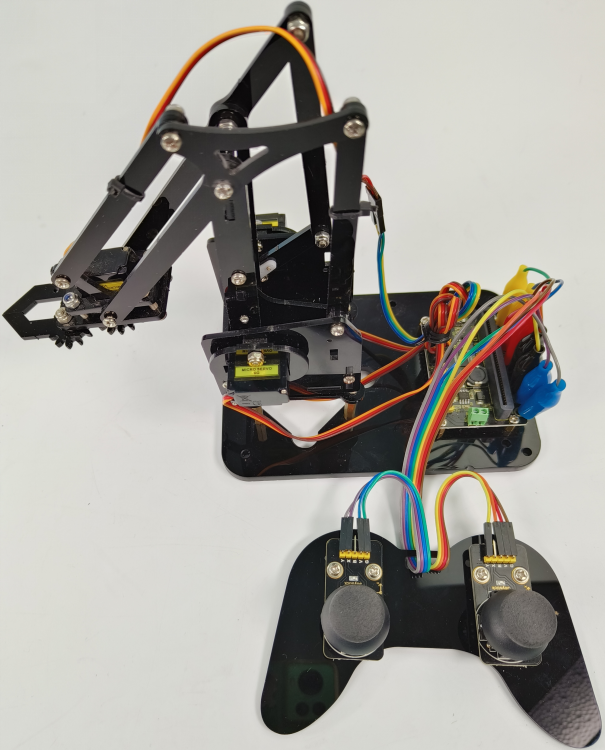
完整的Micro:bit 4自由度机械手臂
接外接电源
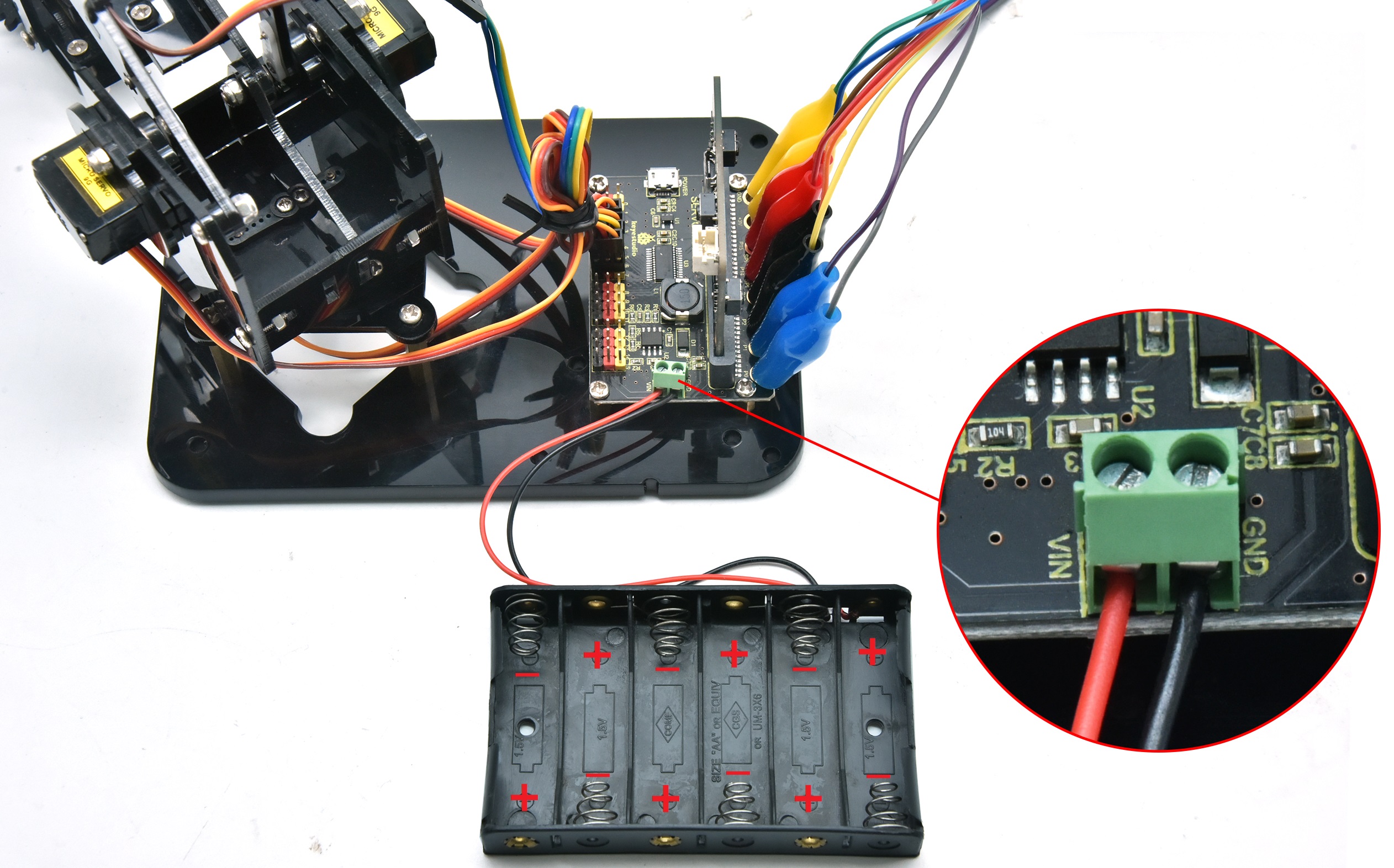
用一字螺丝刀(套件提供有)将电池盒的红线端接入VIN端,将黑线端接入GND端。
电池盒中有弹簧的一端是负极( - ),则另一端是正极( + )。(5号电池自备)