KE3051安装步骤#
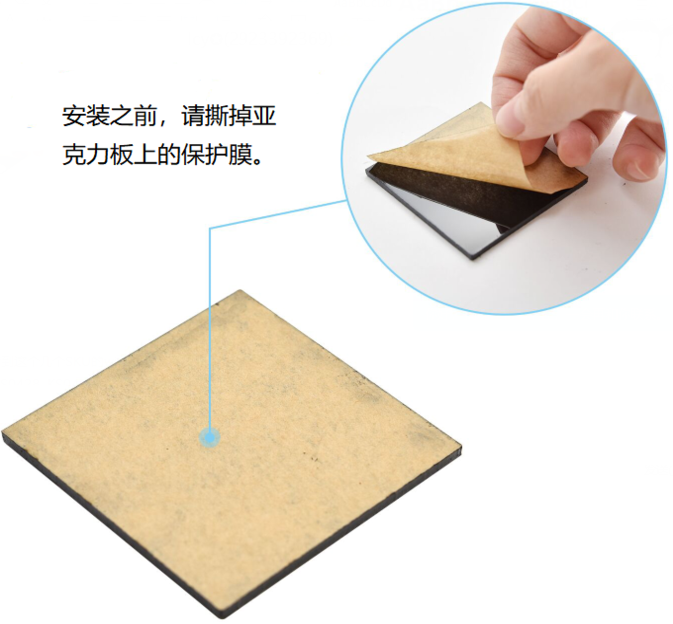
注意:这个套件的亚克力板使用时需要先撕去上面的保护膜。
安装1
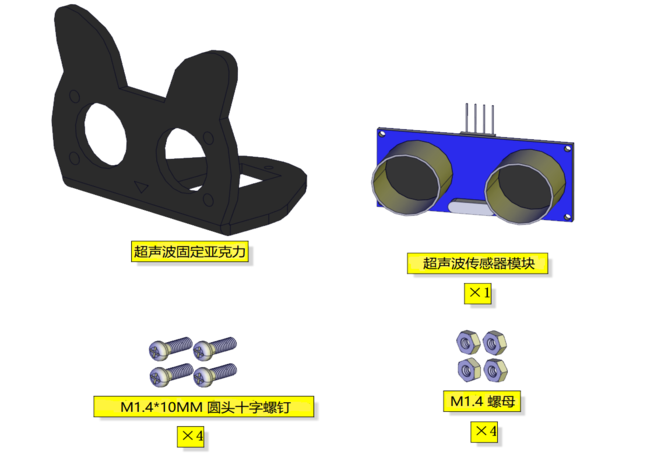
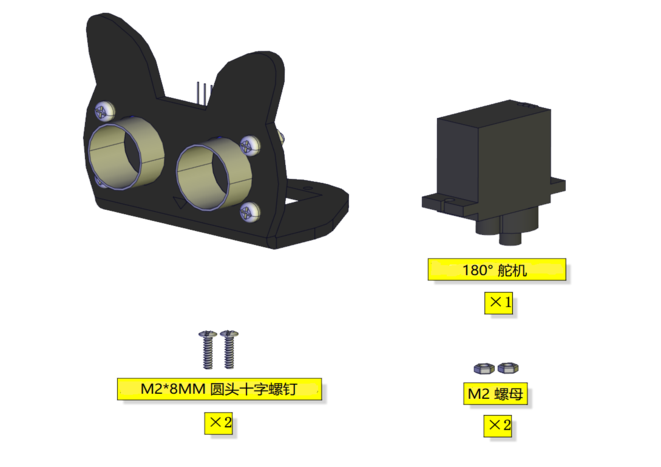
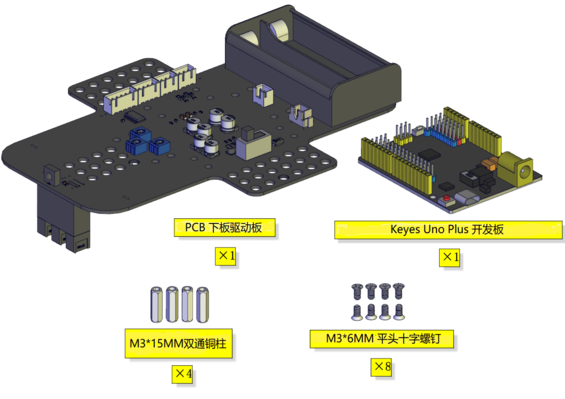
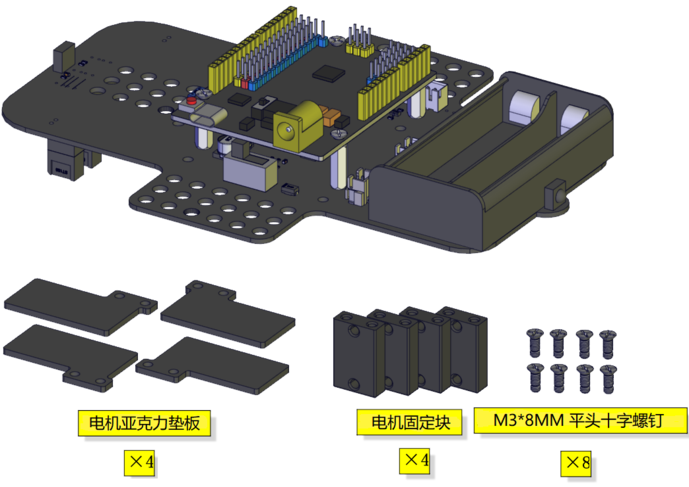
安装所需零件
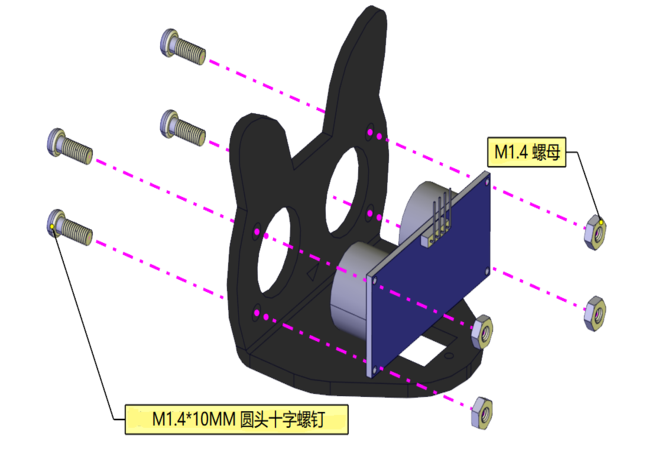
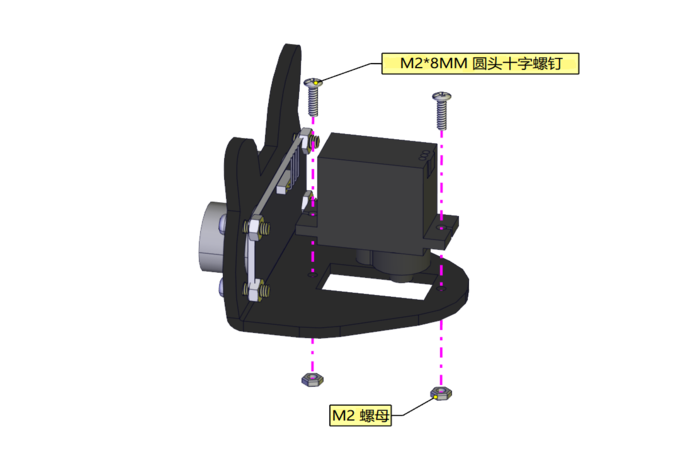
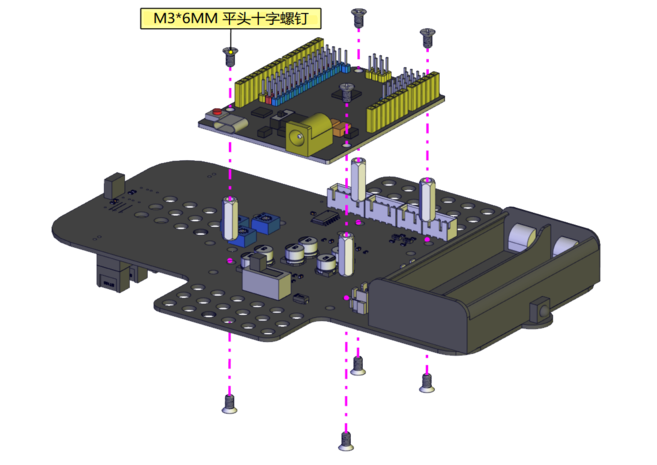
安装
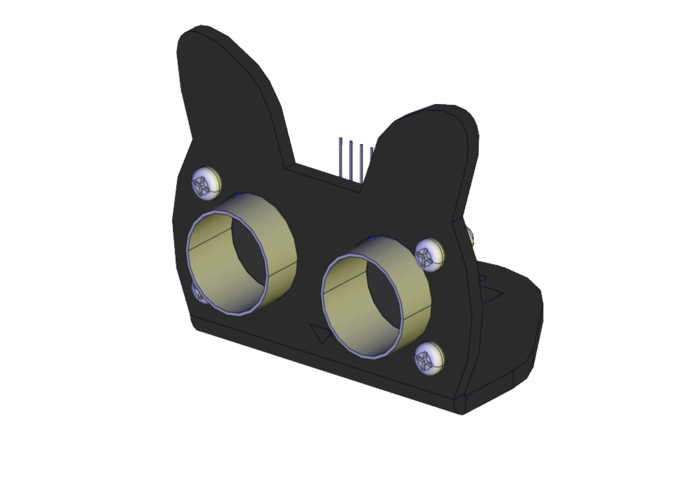
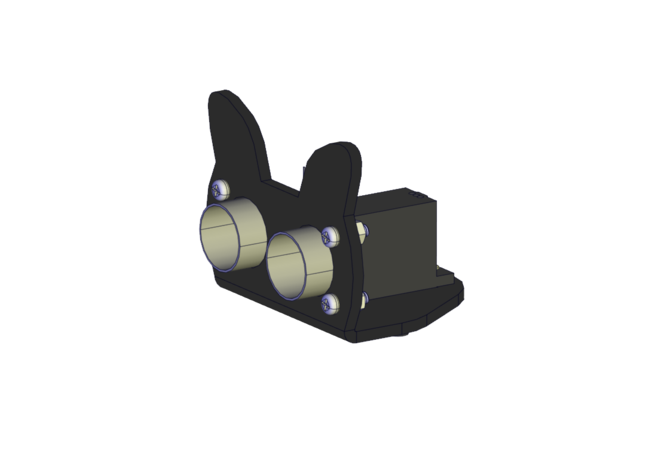
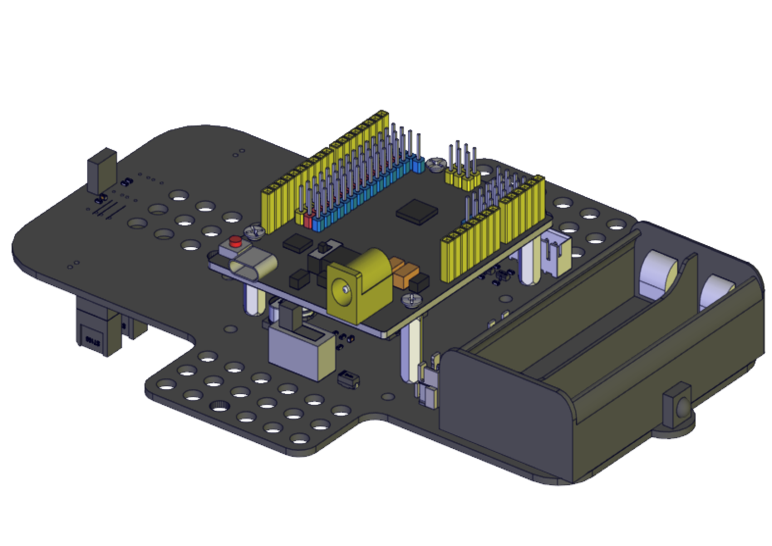
完成
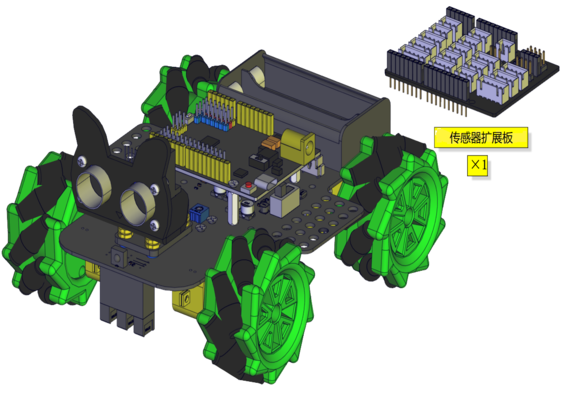
安装2
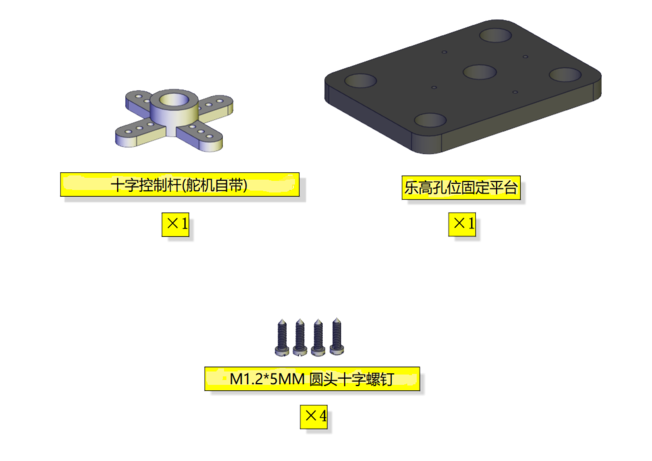
安装所需零件
安装
完成
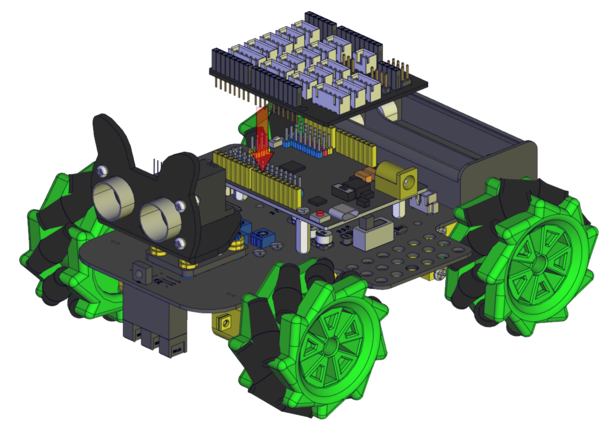
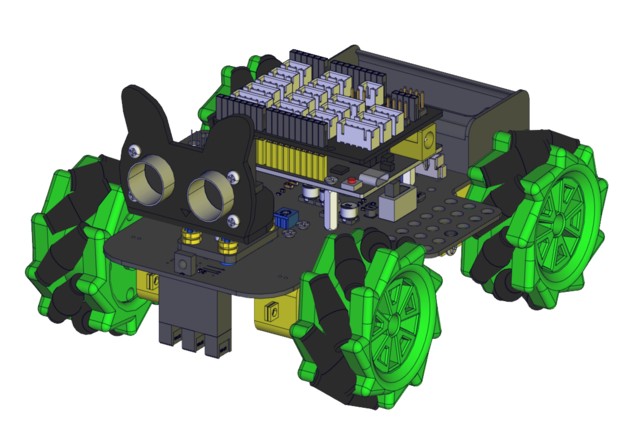
安装3
安装所需零件
安装
完成
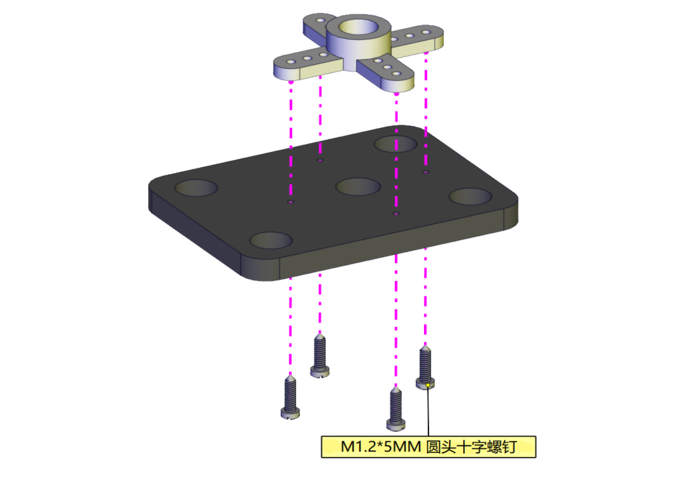
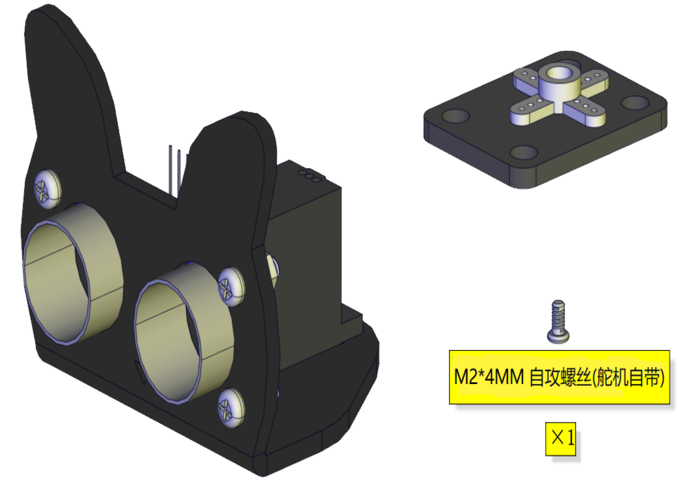
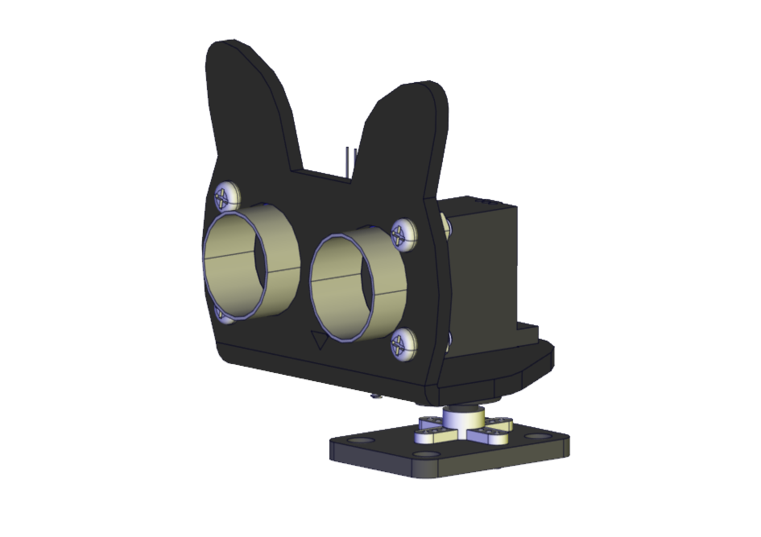
安装4(此步骤安装前需调节舵机角度)
请根据右图代码使舵机角度调节到90度
舵机 |
扩展板 |
|---|---|
棕线 |
G |
红线 |
5V |
橙黄线 |
D9 |
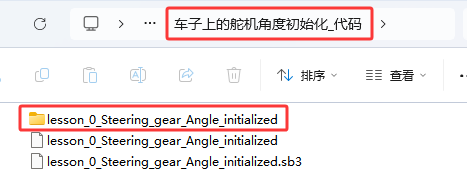
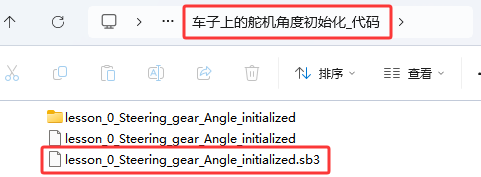
⚠️ 请先下载调节车子上的舵机角度:车子上的舵机角度初始化_代码,保存至您方便使用的路径下。

⚠️ 特别提醒: 以下三种方法,根据自己的情况自由选择。
方法一:Arduino 代码
⚠️特别提示: 在编写代码并上传之前,必须安装 Arduino IDE,请进入链接:Arduino IDE开发环境设置
//*****************************************************************
/*
设置90度,编译并上传到开发板。连接到D9端口的舵机将旋转到90°
*/
#include <Servo.h>
Servo myServo;
#define servo_pin 9
void setup() {
myServo.attach(servo_pin);
myServo.write(0);
delay(1000);
myServo.write(90);
delay(1000);
myServo.write(180);
delay(1000);
myServo.write(90);
delay(1000);
}
void loop() {
}
//*****************************************************************
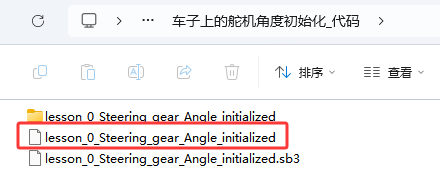
资料包提供了调整车子上舵机的代码,请打开并烧录到Keyes Uno Plus主板,如下图所示。在文件夹 …\车子上的舵机角度初始化_代码 ,打开文件lesson_0_Steering_gear_Angle_initialized.ino。或将上述测试代码复制粘贴到Arduino IDE中。
将上述测试代码上传至主板之后,未发现舵机转动,可以按下主板上的复位键。
方法二:Scratch 代码
⚠️特别提示: 在编写代码并上传之前,必须安装 KidsBlock IDE,请进入链接:KidsBlock 开发环境设置
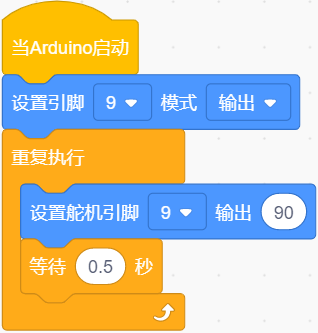
Scratch代码在资料中也有提供,打开舵机的调整代码并烧录到Keyes Uno Plus主板,完成。代码如下图位置:
将上述测试代码上传至主板之后,未发现舵机转动,可以按下主板上的复位键。
方法三:Mixly 代码
⚠️特别提示: 在编写代码并上传之前,必须安装 Mixly IDE,请进入链接:Mixly IDE开发环境设置

Mixly代码在资料中也有提供,打开舵机的调整代码并烧录到Keyes Uno Plus主板,完成。代码如下图位置:
将上述测试代码上传至主板之后,未发现舵机转动,可以按下主板上的复位键。
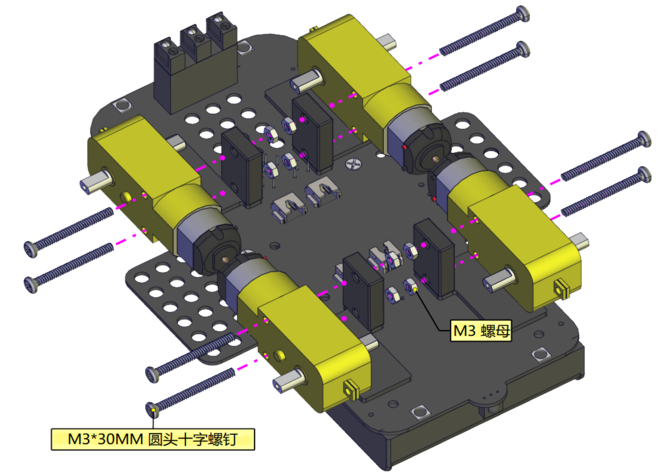
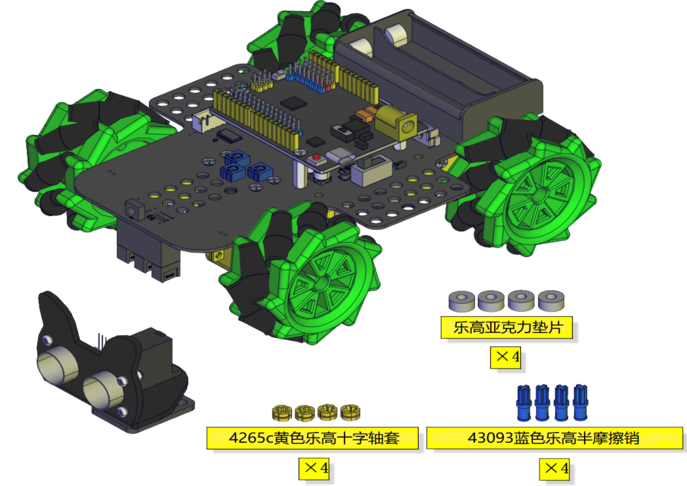
安装所需零件
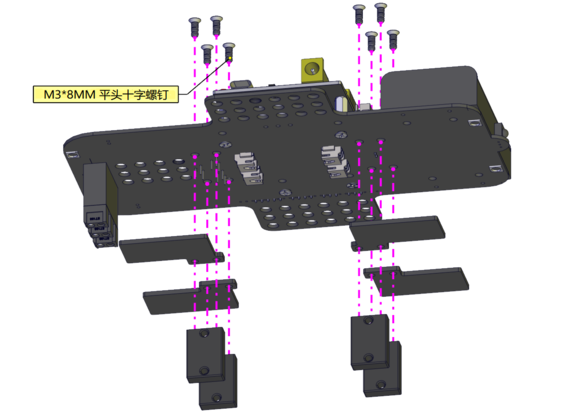
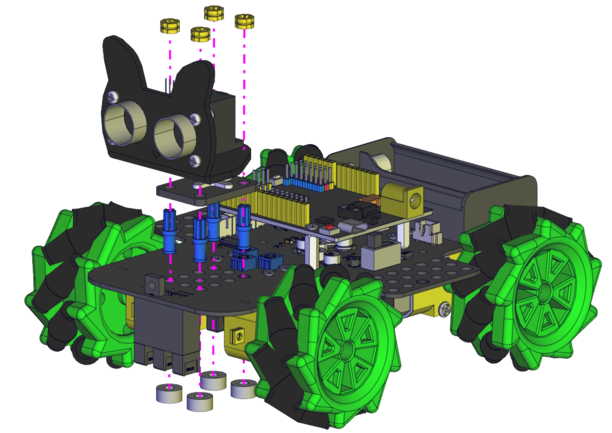
安装(注意安装方向)
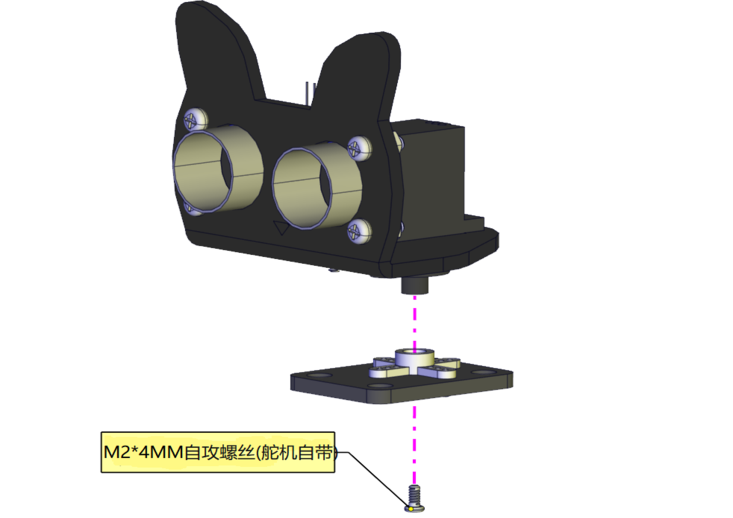
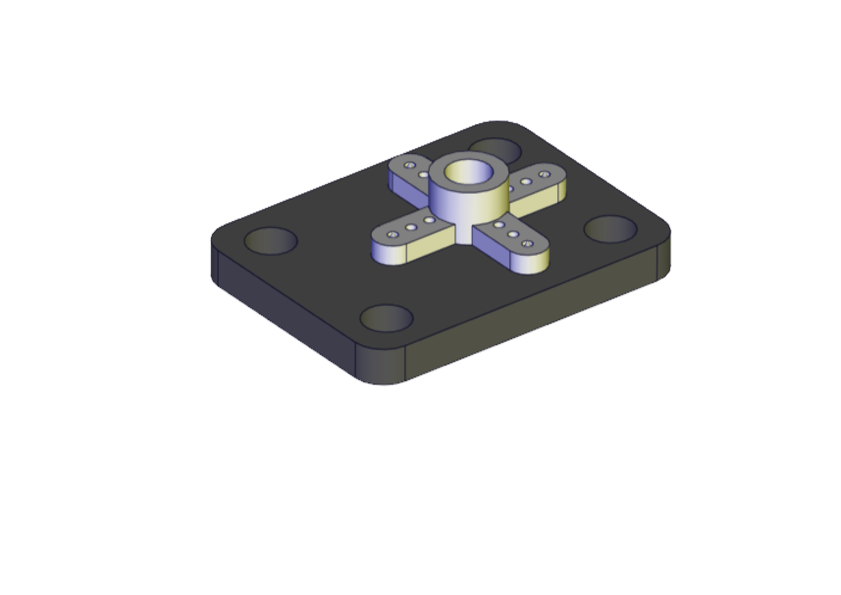
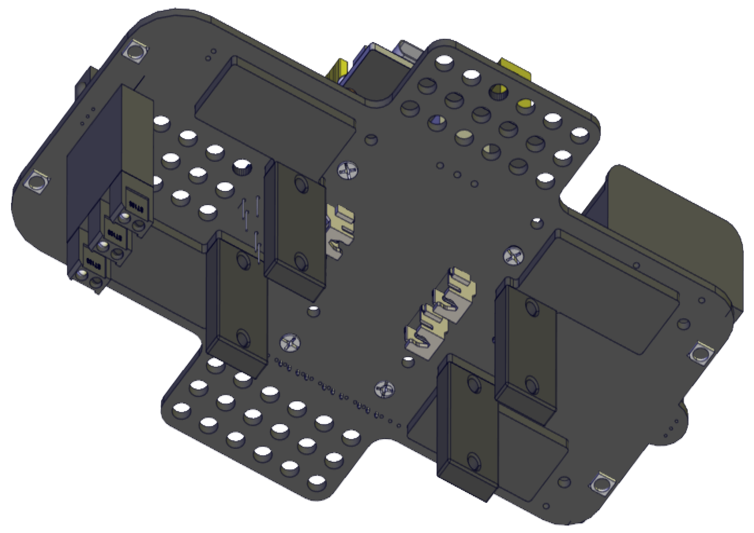
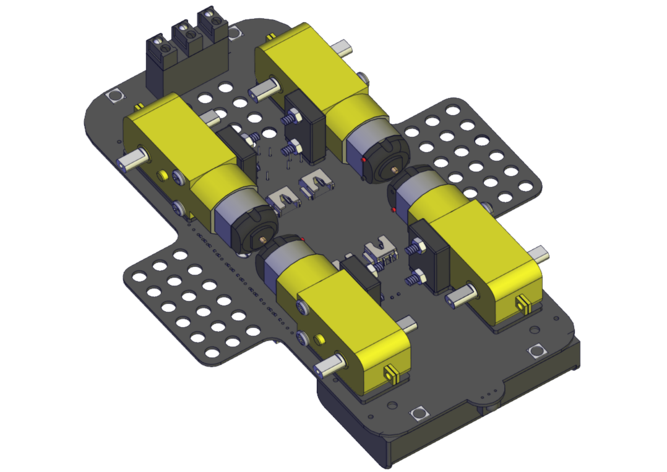
完成
安装5 安装所需零件
安装
完成
安装6 安装所需零件
安 装
完成
安装7 安装所需零件
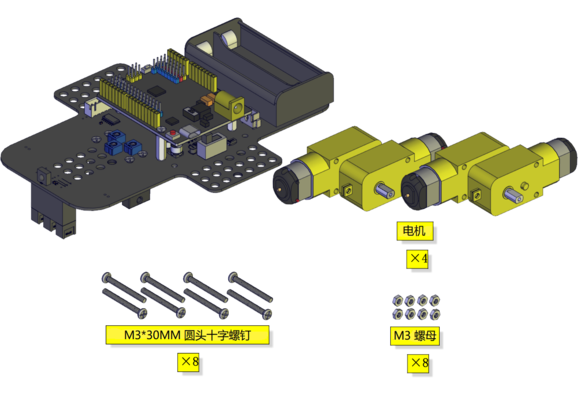
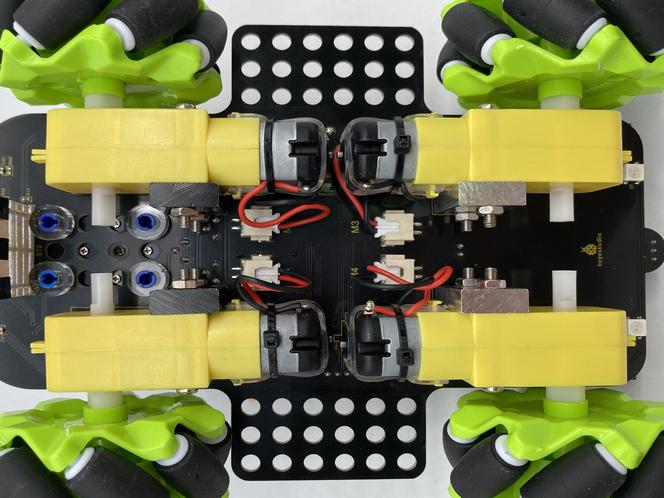
安装(注意电机安装方向,线材方向朝内)
完成
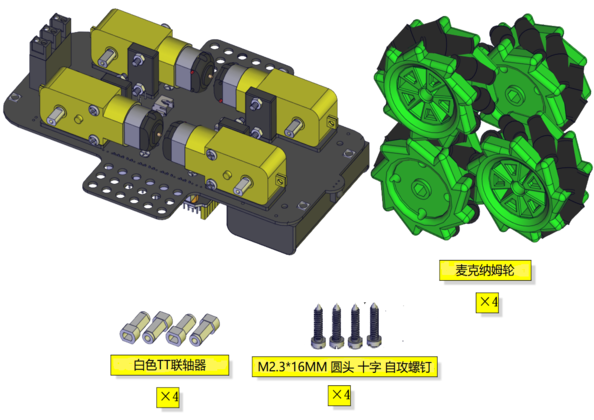
安装8 安装所需零件
安装(注意麦克纳姆轮的安装方向)
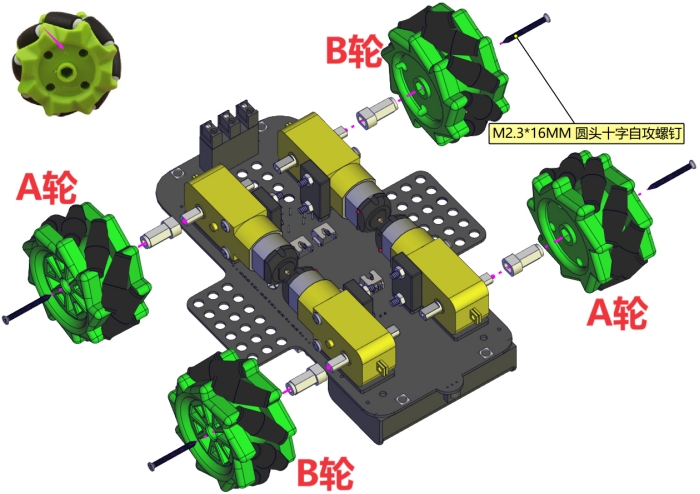
完成
安装9 安装所需零件
安装
完成
安装10 安装所需零件
安装
完成
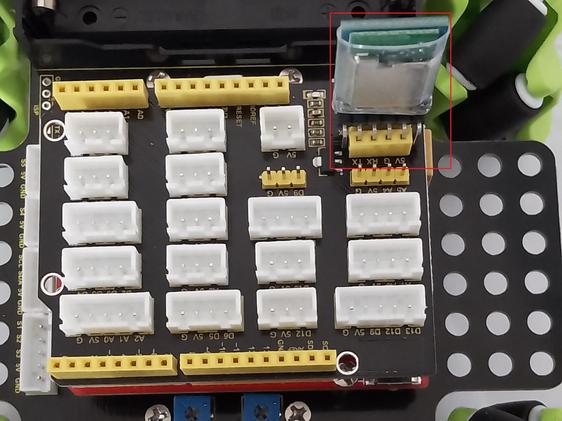
插入蓝牙模块
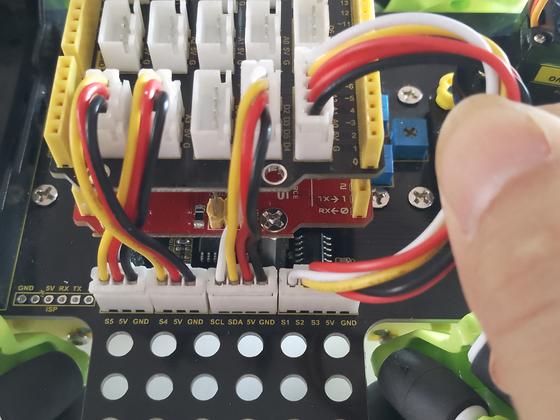
接线图 超声波模块接线
超声波传感器传感器 |
扩展板 |
|---|---|
Vcc |
V |
Trig |
D12 |
Echo |
D13 |
Gnd |
G |

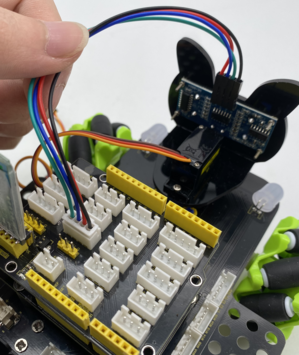
舵机 |
接线 |
|---|---|
舵机 |
扩展板 |
棕线 |
G |
红线 |
5V |
橙黄线 |
D9 |
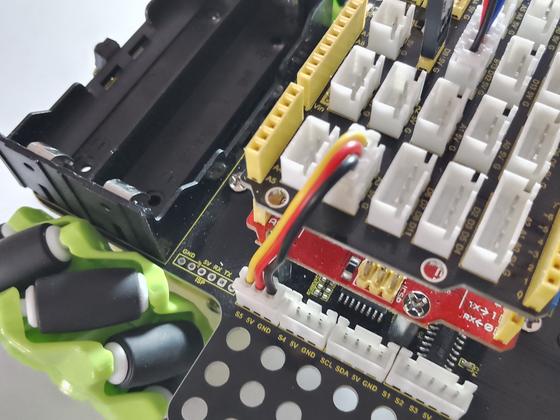
控制红外接收传感器接线
驱动板 |
扩展板 |
|---|---|
GND |
G |
5V |
5V |
S5 |
A3 |
控制RGB 2812灯接线
驱动板 |
扩展板 |
|---|---|
GND |
G |
5V |
5V |
S4 |
D10 |

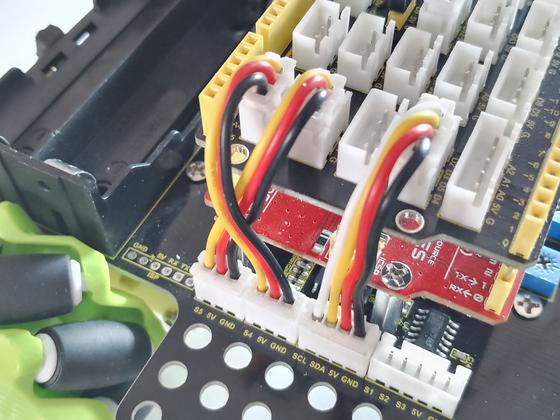
控制电机和七彩灯接线
驱动板 |
扩展板 |
|---|---|
SCL |
D2 |
SDA |
D3 |
5V |
D5 |
GND |
D4 |
控制三路循迹接线
驱动板 |
扩展板 |
|---|---|
S1 |
A2 |
S2 |
A1 |
S3 |
A0 |
5V |
5V |
GND |
G |
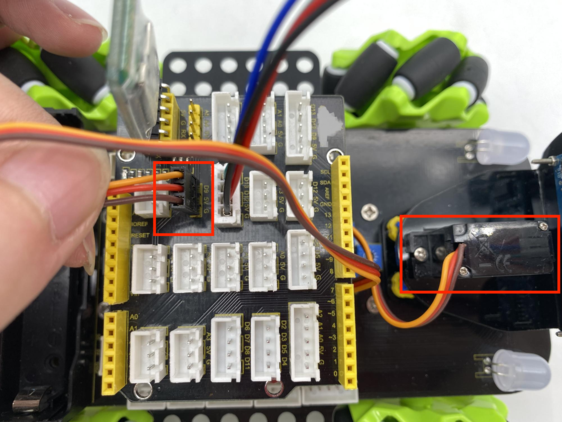
如图将电机接到对应的接口上
电池安装示范
