实验三十六 综合实验#

🌟 项目简介#
前面我们已经完成了多个独立小实验(如LED闪烁、红外遥控、超声波测距等),每次都要单独上传代码,操作比较麻烦。那能不能把它们“打包”在一起,用一个按键就能切换不同功能呢?
当然可以! 本实验就是这样一个“多功能集成器”:
✅ 按一次键 → 切换一个功能
✅ 循环切换 → 6812彩灯 / 红外接收 / 摇杆读取 / 电位器调光 / 超声波测距
✅ 所有功能共用同一块Pico板和同一份代码,无需反复烧录!
🔧 工作原理#
我们利用按键中断来统计按下次数,再用 keys % 5 计算余数(0、1、2、3、4),每个余数对应一个实验功能:
余数 0→ 随机颜色循环点亮 4 颗 6812 RGB 灯余数 1→ 等待红外遥控信号,并在串口打印按键编码(如“Up”“OK”)余数 2→ 实时读取摇杆的 X/Y 轴模拟值 + 按键 Z 值,并打印到串口余数 3→ 旋转电位器调节白色LED亮度(PWM控制)余数 4→ 触发超声波模块,测量前方距离(单位:厘米)
所有传感器/模块共用 Pico 的 GPIO 引脚,通过程序逻辑分时控制,互不干扰。
📦 所需材料#
|
|
|
|
|
|---|---|---|---|---|
Raspberry Pi Pico板 ×1 |
Raspberry Pi Pico扩展板 ×1 |
keyes DIY电子积木 白色LED模块 ×1 |
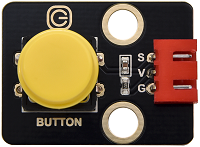
keyes DIY电子积木 单路按键模块 ×1 |
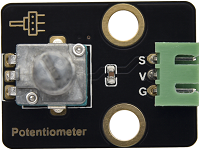
keyes DIY电子积木 旋转电位器模块 ×1 |
|
|
|
|
|
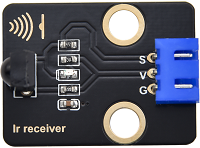
keyes DIY电子积木 红外接收模块 ×1 |
keyes DIY电子积木 摇杆模块 ×1 |
keyes brick HC-SR04超声波传感器 ×1 |
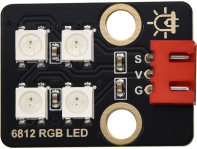
Keyes DIY电子积木 6812 RGB模块 ×1 |
MicroUSB线 ×1 |
|
|
|
|
|
防反插3Pin ×5 |
防反插4Pin ×1 |
防反插5Pin ×1 |
遥控器 ×1 |





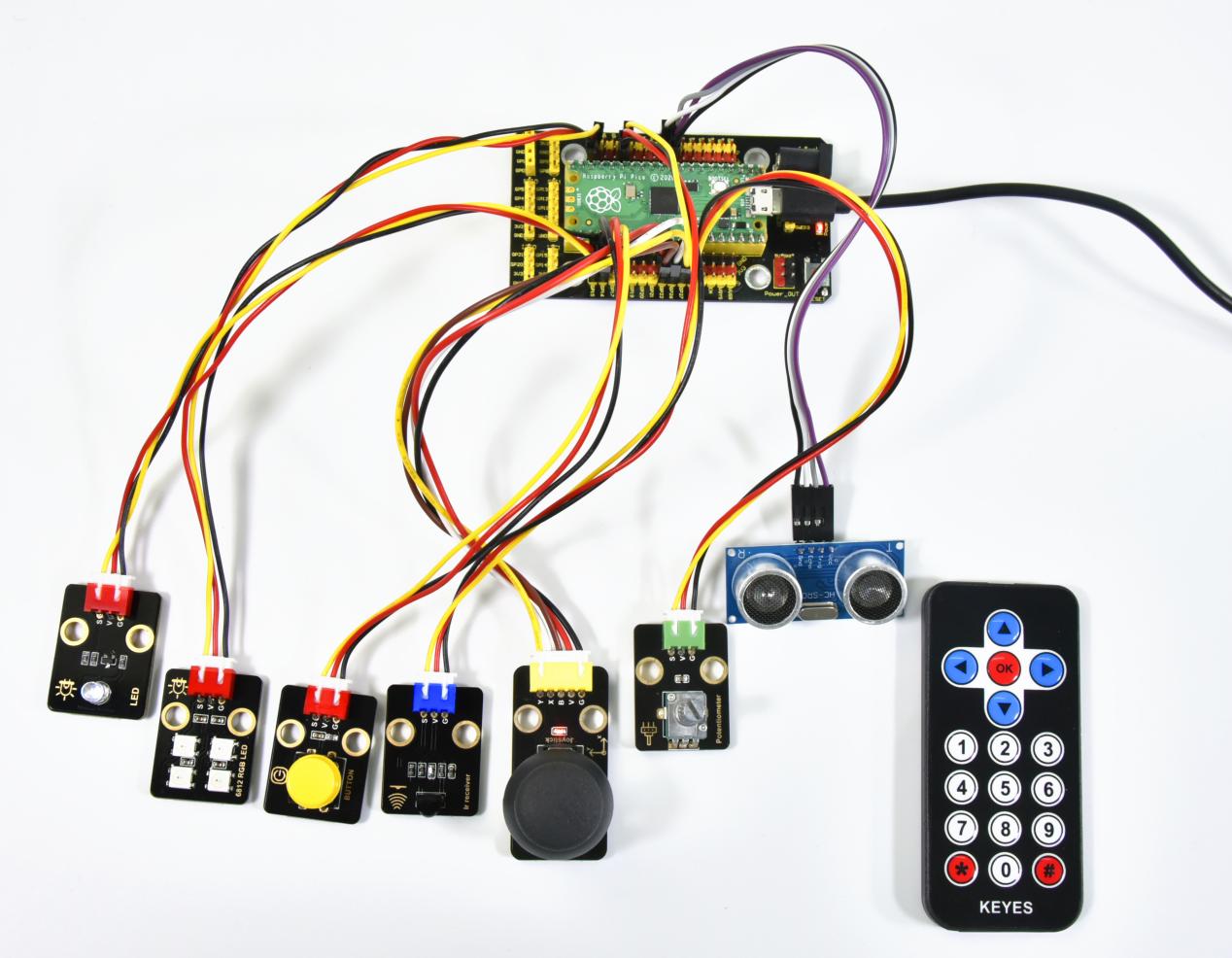
💡 小提示:所有模块都使用标准防反插接口,插错方向无法插入,接线更安全、更省心!
🔌 接线图#
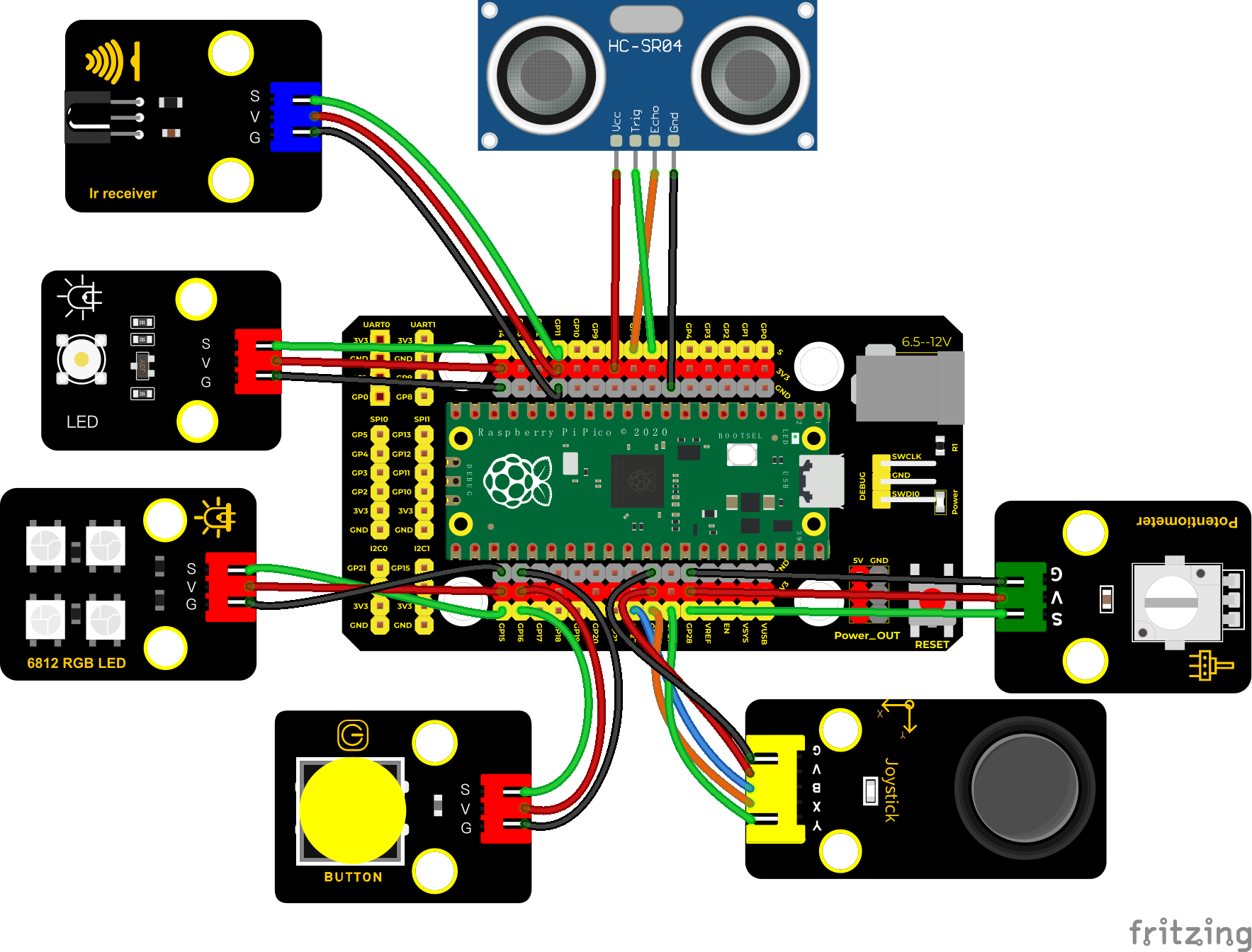
📌 关键引脚对照表(请务必按此连接):
模块名称 |
连接引脚(Pico端) |
说明 |
|---|---|---|
白色LED模块 |
GP14 |
PWM输出,控制亮度 |
单路按键模块 |
GP16 |
下降沿触发中断 |
旋转电位器模块 |
ADC28(GP28) |
模拟输入,读取旋钮位置 |
红外接收模块 |
GP11 |
数字输入,接收红外信号 |
摇杆模块(Z键) |
GP22 |
数字输入,检测是否按下 |
摇杆模块(X轴) |
ADC26(GP26) |
模拟输入,X方向电压 |
摇杆模块(Y轴) |
ADC27(GP27) |
模拟输入,Y方向电压 |
超声波模块(Trig) |
GP6 |
输出触发脉冲 |
超声波模块(Echo) |
GP7 |
输入回波信号 |
6812 RGB模块 |
GP15 |
PIO高速驱动,单线协议 |
✅ 接线完成后,请再次核对——尤其注意 GP15(RGB)、GP11(红外)、GP6/GP7(超声波) 这几组不能接错!
💻 示例代码(MicroPython)#
# Keyes Starter Kit for Raspberry Pi Pico
# 课程 36
# Comprehensive experiment
from machine import Pin, PWM, ADC
import array, time
import random
import rp2
# 初始化各传感器
potentiometer = ADC(28) # 电位器 → GP28
button = Pin(16, Pin.IN, Pin.PULL_UP) # 按键 → GP16(上拉,按下为低电平)
led = PWM(Pin(14)) # 白色LED → GP14
led.freq(1000)
ird = Pin(11, Pin.IN) # 红外接收 → GP11
B = Pin(22, Pin.IN, Pin.PULL_UP) # 摇杆Z键 → GP22(上拉)
X = ADC(26) # 摇杆X轴 → GP26
Y = ADC(27) # 摇杆Y轴 → GP27
# 超声波模块
trigger = Pin(6, Pin.OUT)
echo = Pin(7, Pin.IN)
# 6812 RGB灯配置
NUM_LEDS = 4
PIN_NUM = 15
brightness = 0.2
# 红外遥控指令码库(Keyes遥控器常用按键)
act = {
"1": "LLLLLLLLHHHHHHHHLHHLHLLLHLLHLHHH",
"2": "LLLLLLLLHHHHHHHHHLLHHLLLLHHLLHHH",
"3": "LLLLLLLLHHHHHHHHHLHHLLLLLHLLHHHH",
"4": "LLLLLLLLHHHHHHHHLLHHLLLLHHLLHHHH",
"5": "LLLLLLLLHHHHHHHHLLLHHLLLHHHLLHHH",
"6": "LLLLLLLLHHHHHHHHLHHHHLHLHLLLLHLH",
"7": "LLLLLLLLHHHHHHHHLLLHLLLLHHHLHHHH",
"8": "LLLLLLLLHHHHHHHHLLHHHLLLHHLLLHHH",
"9": "LLLLLLLLHHHHHHHHLHLHHLHLHLHLLHLH",
"0": "LLLLLLLLHHHHHHHHLHLLHLHLHLHHLHLH",
"Up": "LLLLLLLLHHHHHHHHLHHLLLHLHLLHHHLH",
"Down": "LLLLLLLLHHHHHHHHHLHLHLLLLHLHLHHH",
"Left": "LLLLLLLLHHHHHHHHLLHLLLHLHHLHHHLH",
"Right": "LLLLLLLLHHHHHHHHHHLLLLHLLLHHHHLH",
"Ok": "LLLLLLLLHHHHHHHHLLLLLLHLHHHHHHLH",
"*": "LLLLLLLLHHHHHHHHLHLLLLHLHLHHHHLH",
"#": "LLLLLLLLHHHHHHHHLHLHLLHLHLHLHHLH"
}
#红外解码函数(读取一次完整信号)
def read_ircode(ird):
wait = 1
complete = 0
seq0 = []
seq1 = []
while wait == 1:
if ird.value() == 0:
wait = 0
while wait == 0 and complete == 0:
start = time.ticks_us()
while ird.value() == 0:
ms1 = time.ticks_us()
diff = time.ticks_diff(ms1, start)
seq0.append(diff)
while ird.value() == 1 and complete == 0:
ms2 = time.ticks_us()
diff = time.ticks_diff(ms2, ms1)
if diff > 10000:
complete = 1
seq1.append(diff)
# 解析高/低电平时间,生成"H"/"L"字符串
code = ""
for val in seq1:
if val < 2000:
if val < 700:
code += "L"
else:
code += "H"
# 匹配预设指令
command = ""
for k, v in act.items():
if code == v:
command = k
break
return command if command else "Unknown"
#PIO程序:驱动6812 RGB灯(底层高速时序)
@rp2.asm_pio(sideset_init=rp2.PIO.OUT_LOW, out_shiftdir=rp2.PIO.SHIFT_LEFT, autopull=True, pull_thresh=24)
def sk6812():
T1 = 2
T2 = 5
T3 = 3
wrap_target()
label("bitloop")
out(x, 1) .side(0) [T3 - 1]
jmp(not_x, "do_zero") .side(1) [T1 - 1]
jmp("bitloop") .side(1) [T2 - 1]
label("do_zero")
nop() .side(0) [T2 - 1]
wrap()
# 初始化PIO状态机(驱动GP15)
sm = rp2.StateMachine(0, sk6812, freq=8_000_000, sideset_base=Pin(PIN_NUM))
sm.active(1)
# RGB灯显示缓冲区
ar = array.array("I", [0 for _ in range(NUM_LEDS)])
def pixels_show():
dimmer_ar = array.array("I", [0 for _ in range(NUM_LEDS)])
for i, c in enumerate(ar):
r = int(((c >> 8) & 0xFF) * brightness)
g = int(((c >> 16) & 0xFF) * brightness)
b = int((c & 0xFF) * brightness)
dimmer_ar[i] = (g << 16) + (r << 8) + b
sm.put(dimmer_ar, 8)
time.sleep_ms(10)
def pixels_set(i, color):
ar[i] = (color[1] << 16) + (color[0] << 8) + color[2]
#超声波测距函数(单位:厘米)
def getDistance(trigger, echo):
trigger.low()
time.sleep_us(2)
trigger.high()
time.sleep_us(10)
trigger.low()
while echo.value() == 0:
start = time.ticks_us()
while echo.value() == 1:
end = time.ticks_us()
d = (end - start) * 0.0343 / 2 # 声速0.0343 cm/us,除以2得单程距离
return d
# 全局变量:记录按键次数
keys = 0
#按键中断回调函数(每按一次,keys+1)
def toggle_handle(pin):
global keys
time.sleep_ms(20) # 消抖
if pin.value() == 0: # 确保是按下动作(低电平)
keys += 1
# 绑定中断(下降沿触发)
button.irq(trigger=Pin.IRQ_FALLING, handler=toggle_handle)
#各功能函数
def show6812():
R = random.randint(0, 255)
G = random.randint(0, 255)
B = random.randint(0, 255)
for i in range(NUM_LEDS):
pixels_set(i, (R, G, B))
pixels_show()
time.sleep(0.3)
def IRreceive():
command = read_ircode(ird)
print("IR Command:", command)
def showJoystick():
B_value = B.value()
X_value = X.read_u16()
Y_value = Y.read_u16()
print(f"Joystick → Button:{B_value}, X:{X_value}, Y:{Y_value}")
time.sleep(0.1)
def adjustLight():
pot_value = potentiometer.read_u16()
led.duty_u16(pot_value) # 0~65535 映射亮度
print(f"Potentiometer: {pot_value}")
def showDistance():
try:
distance = getDistance(trigger, echo)
print(f"Distance: {distance:.2f} cm")
except:
print("Distance: Error")
time.sleep(0.1)
#主循环:根据按键次数切换功能
while True:
nums = keys % 5
print(f"Mode: {nums}")
if nums == 0:
show6812()
elif nums == 1:
IRreceive()
elif nums == 2:
showJoystick()
elif nums == 3:
adjustLight()
elif nums == 4:
showDistance()
📚 代码解析(小学生也能懂!)#
代码片段 |
是什么意思? |
小贴士 |
|---|---|---|
|
告诉Pico:“只要按键一按下去,立刻执行 |
中断就像“电话铃响”,不用一直盯着看,来了就处理 |
|
“用按键次数除以5,只看余数是多少” → 0→1→2→3→4→0→1…永远循环 |
|
|
给第 |
三原色混合,就能变出任何颜色!🌈 |
|
把电位器读到的数字(0~65535),直接变成LED的亮度 |
数字越大,灯越亮;0就是完全熄灭 |
|
发个“滴”声波出去,听它弹回来用了多久,算出有多远 |
就像蝙蝠用回声定位!🦇 |
✅ 实验现象(按顺序观察)#
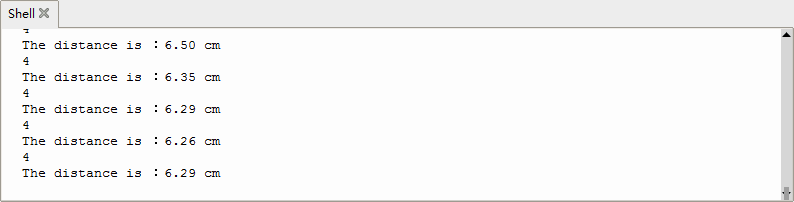
接好线,用USB线给Pico通电,打开Thonny或串口工具(波特率115200),看到如下效果:
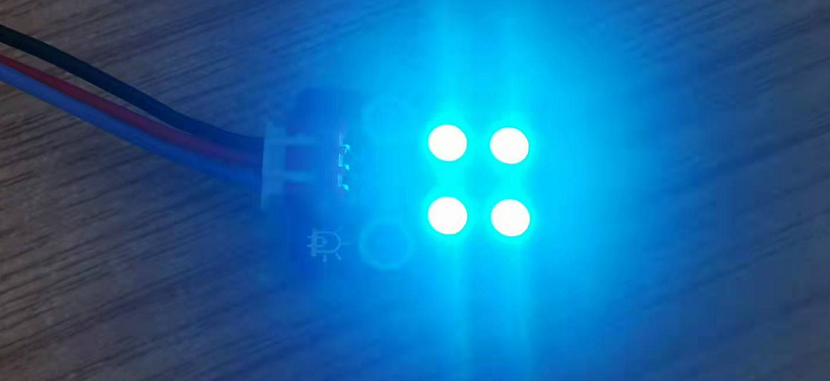
初始状态(按键0次 → 余数0)
→ 四颗6812灯珠开始随机变色,每0.3秒换一次颜色!

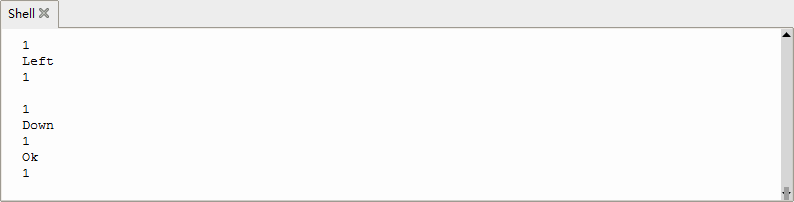
按第1下 → 余数1
→ 彩灯停止,串口等待红外信号。拿起遥控器对准接收头,按任意键 → 显示"IR Command: Up"或"Ok"等。
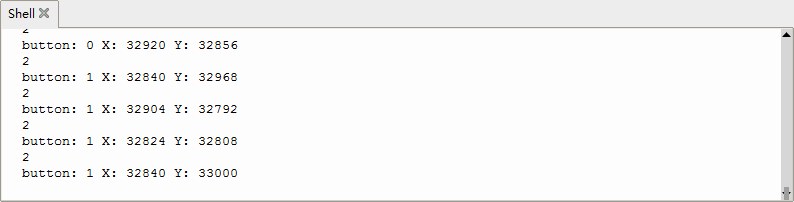
按第2下 → 余数2
→ 串口开始快速打印摇杆数据,例如:Joystick → Button:1, X:32768, Y:65535(Z没按是1,X居中约32768)
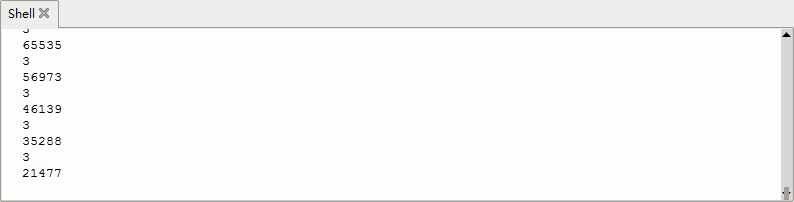
按第3下 → 余数3
→ 白色LED亮度随电位器旋转实时变化,串口同步显示数值(0最暗,65535最亮)
按第4下 → 余数4
→ 串口每0.1秒打印一次距离,如Distance: 12.45 cm(手靠近/远离会变化)
按第5下 → 余数0
→ 回到第一步,彩灯再次闪烁!从此无限循环 ✅
⚠️ 注意事项(安全又成功的关键!)#
🔌 务必使用防反插杜邦线,插错方向可能烧毁模块!
🔋 Pico仅靠USB供电即可,不要额外接电源,避免电压冲突。
📡 红外接收头要正对遥控器发射头(黑色小圆点),距离建议10~30cm。
📏 超声波模块前方保持空旷,避免斜面/吸音材料(如毛衣、海绵)影响测距。
🐞 如果串口无反应:检查Thonny是否选对端口、波特率是否为115200、USB线是否支持数据传输(有些充电线不行)。
🔄 按键失灵? 多按几次,或重启Pico(拔插USB),可能是接触不良或消抖未生效。
🧠 扩展思维#
在本课 6812 彩灯随机闪烁的基础上,如果想让它实现「呼吸灯」效果(渐亮→渐暗→循环),该在 show6812() 函数中怎样修改?