实验四 避障传感器检测障碍物#

🌟 项目简介#
本实验将使用 Keyes DIY 电子积木避障传感器,让 Raspberry Pi Pico「看见」前方是否有障碍物。当手或物体靠近传感器时,它会自动检测并告诉 Pico —— 我们再把结果在电脑屏幕上显示出来!就像小车的“眼睛”一样,是智能小车、自动避障机器人最基础的功能之一。
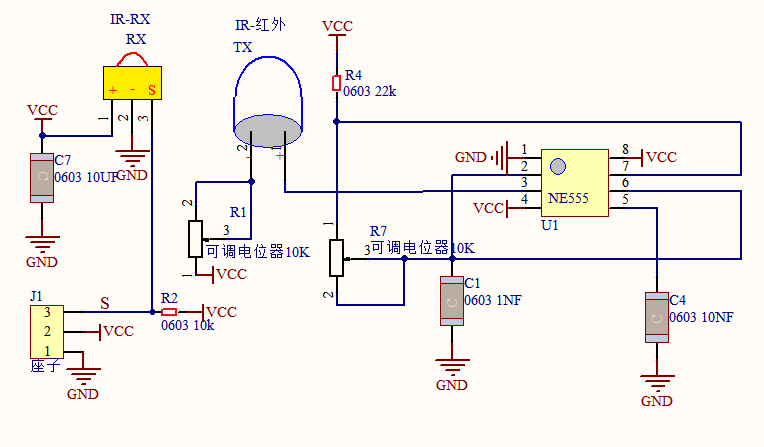
⚙️ 工作原理(小学生也能懂)#
避障传感器其实是一对“红外搭档”:
左边是红外灯(发射管):像手电筒一样,不断发出人眼看不见的红外光;
右边是红外眼(接收管):专门“看”有没有光反射回来。
✅ 没障碍物时:红外光飞出去就散掉了,没光回来 → 接收管“没看到”,S 引脚输出 高电平(1) → 显示 “All going well”;
❌ 有障碍物时:红外光碰到你的手/书本/墙壁,被反射回来 → 接收管“看到了”,S 引脚输出 低电平(0) → 显示 “There are obstacles”。
💡 小知识:传感器上的两个小旋钮(电位器)就像“音量+调频旋钮”——
左边旋钮调“红外光有多亮”(发射功率),
右边旋钮调“红外眼有多灵敏”(接收阈值)。
调好它们,传感器就能在 2–20 cm 范围内稳定工作!
🧰 所需材料(全部配齐,直接开做!)#
|
|
|
|
|
|---|---|---|---|---|
Raspberry Pi Pico 板 ×1 |
Raspberry Pi Pico 扩展板 ×1 |
Keyes 避障传感器 ×1 |
防反插 3Pin 线(黑/红/黄)×1 |
Micro USB 数据线 ×1 |

📌 小提示:避障传感器有 3 根线——
VCC(红)→ 接 3.3V 或 5V(本实验接 3.3V 更安全)
GND(黑)→ 接 GND
S(黄)→ 接 Pico 的 GPIO16(即引脚数字 16)
🔌 接线图(一目了然)#
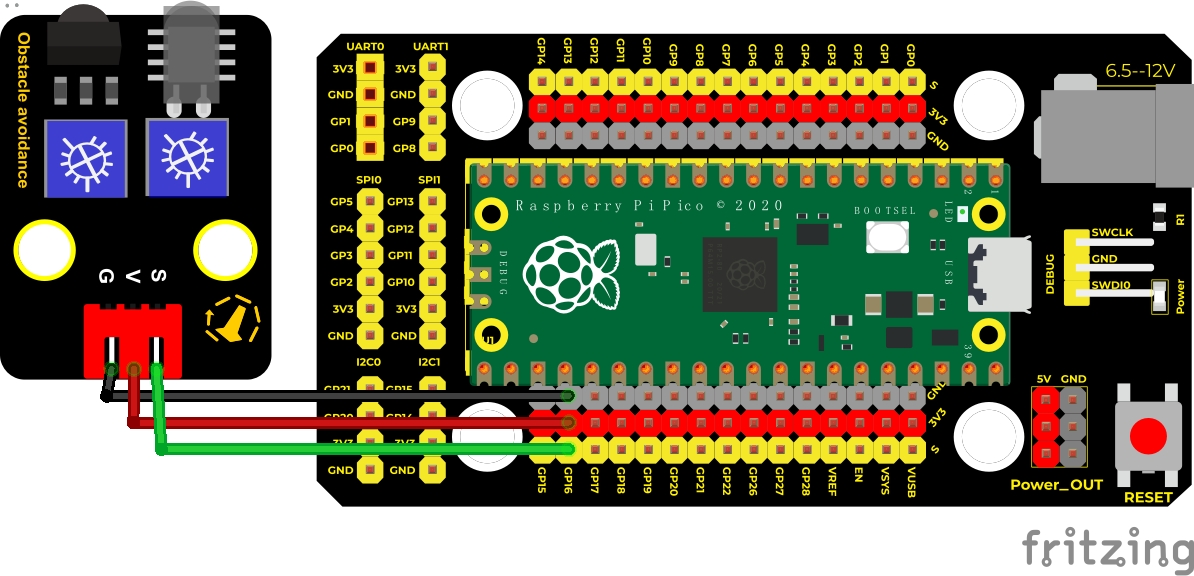
✅ 正确接法(请对照图检查):
传感器 VCC(红)→ Pico 的 3.3V 引脚(不是 VSYS!避免烧坏)
传感器 GND(黑)→ Pico 的 GND 引脚(任意一个 GND 都可以)
传感器 S(黄)→ Pico 的 GP16 引脚(即物理引脚第 21 脚)
⚠️ 注意:Pico 是 3.3V 系统,虽然该传感器支持 3.3V–5V,但首次测试建议用 3.3V 供电,更稳定、更安全!
💻 示例代码(MicroPython,复制即用)#
# ✨ Keyes 避障传感器实验(Pico 版)
# 📌 实验四:检测障碍物
# 📝 使用 GPIO16 读取传感器信号
from machine import Pin
import time
# 创建传感器对象:连接在 GP16,模式为输入(IN)
sensor = Pin(16, Pin.IN)
print("✅ 避障传感器已启动!")
print("👉 请将手慢慢靠近传感器前端……")
while True:
# 读取传感器状态:0=检测到障碍物,1=无障碍物
if sensor.value() == 0:
print("🚨 There are obstacles!")
else:
print("🟢 All going well")
time.sleep(0.1) # 每0.1秒检测一次,避免刷屏太快
📖 代码解析(每行都看得懂)#
代码行 |
中文说明 |
|---|---|
|
导入 Pico 的“引脚控制工具” |
|
导入“时间工具”,用来加小暂停 |
|
把第 16 号引脚设为“输入口”,专门听传感器说话 |
|
如果传感器说“0”,代表它“看到”障碍物啦! |
|
在电脑屏幕上显示提醒(带表情更有趣 😄) |
|
暂停 0.1 秒,让屏幕不疯狂滚动,也给传感器喘口气 |
💡 小技巧:你可以把 0.1 改成 0.5,让打印变慢;改成 0.05,反应更快哦!
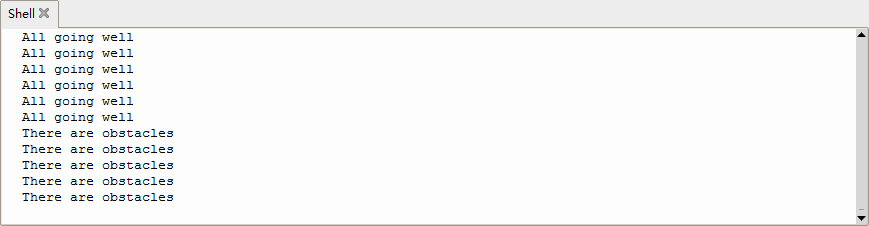
🧪 实验现象(你将看到什么?)#
运行代码后,在 Thonny 或其他 MicroPython IDE 的 Shell(交互窗口) 中,你会看到类似这样的滚动文字:
✅ 避障传感器已启动!
👉 请将手慢慢靠近传感器前端……
🟢 All going well
🟢 All going well
🟢 All going well
🚨 There are obstacles!
🚨 There are obstacles!
🟢 All going well
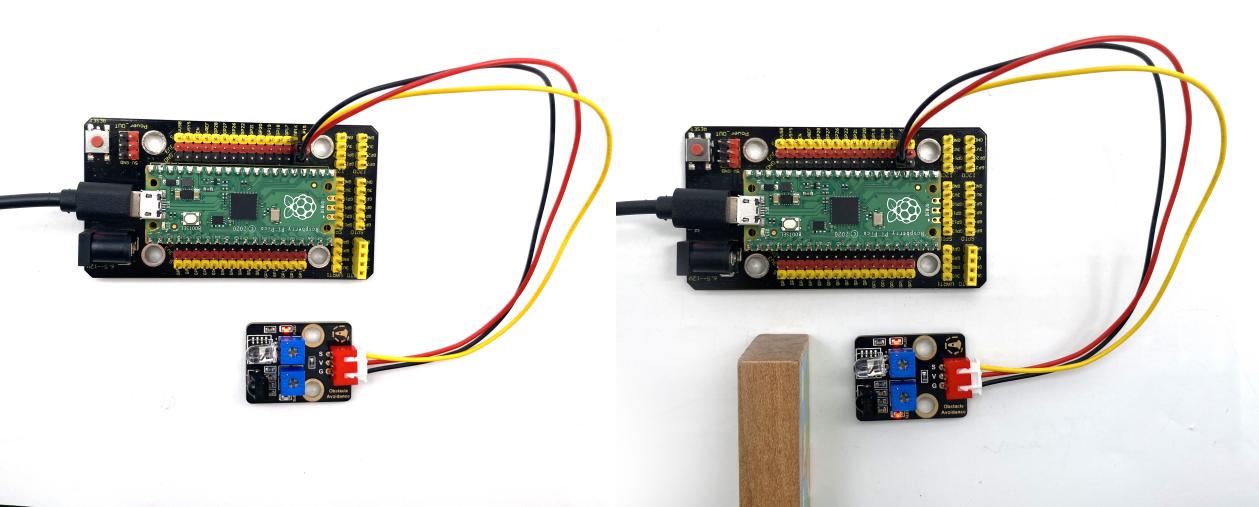
✅ 当手离传感器约 5–15 cm 时,会稳定显示 “There are obstacles”;
✅ 拿开手后,立刻变回 “All going well”。
⚠️ 注意事项(安全又成功的关键!)#
供电优先选 3.3V:Pico 的 3.3V 引脚电流足够驱动该传感器,比接 5V 更稳定,避免干扰。
别接错线! 黄线(S)必须接 GP16;红线(VCC)不能接到 VSYS(那是 5V 输入口,可能损坏传感器)。
调节电位器有方法(第一次必看!):
🔧 先调左边(发射功率):顺时针拧到底 → 再慢慢往回拧,直到传感器上的 P 指示灯刚好不亮(临界点最灵敏);
🔧 再调右边(接收灵敏度):顺时针微调,同时观察 S 指示灯,让它也处于 将亮未亮的临界状态(此时响应最准,抗干扰最强)。
环境光影响小,但别对着强光/阳光直射:日光含红外成分,可能干扰判断;普通教室灯光完全没问题。
传感器正对障碍物效果最好:倾斜角度太大(>30°)可能导致漏检。
🧠 扩展思维#
在本课 LED 闪烁的基础上,如果想让 Pico 在检测到障碍物时,自动点亮板载 LED(GP25)并发出“滴”声(用蜂鸣器),该怎样修改代码?