项目五十三 综合实验#
1.实验说明#
在前面做了很多实验,每做一个实验,都需要重新上传一次代码。可以把多个实验组合在一起吗?可以的,在这一实验中,将前面的一些实验组合在一起。设置时,利用外接按键模块。每按一次按键,功能变换一次,实验功能循环交替。
2.实验器材#
keyes brick LED白发白模块*1
keyes brick 按键传感器*1
keyes brick DHT11温湿度传感器*1
keyes brick ADXL345加速度传感器*1
keyes brick 红外接收传感器*1
keyes brick 摇杆模块传感器*1
keyes brick HC-SR04超声波传感器*1
keyes brick TEMT6000光线传感器*1
keyes brick 可调电位器模块*1
keyes brick 插件RGB模块*1
keyes UNO R3开发板*1
传感器扩展板*1
3P 双头XH2.54连接线*6
4P 双头XH2.54连接线*3
5P 双头XH2.54连接线*1
JMP-1 17键 红外遥控*1
USB线*1
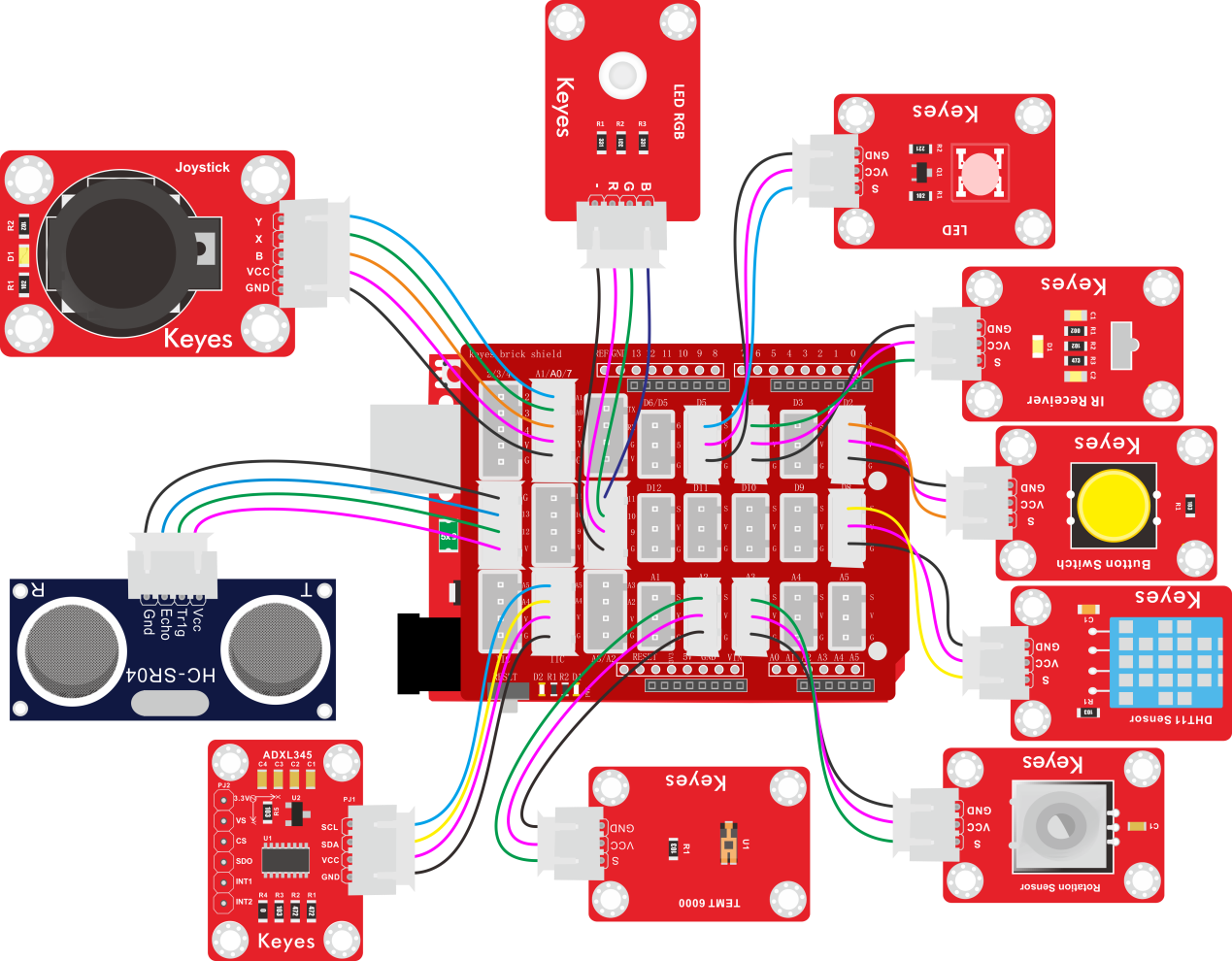
3.接线图#
4.测试代码#
#include <Wire.h>
#include <I2Cdev.h>
#include <ADXL345.h>
#include <dht11.h>
#include <IRremote.h>
dht11 DHT;
#define DHT11_PIN 8
const int RECV_PIN = 4;
int PushCounter = 0;
int State = 1;
int LastState = 1;
int PushCounter1 = 0;
int val1 = 0;
int val2 = 0;
int x = 0;
int y = 0;
int button = 0;
float ADXL345_X = 0;
float ADXL345_Y = 0;
float ADXL345_Z = 0;
int val3 = 0;
int val4 = 0;
int val5 = 0;
int distance = 0;
ADXL345 accel;
decode_results results;
float checkdistance_12_13() {
digitalWrite(12, LOW);
delayMicroseconds(2);
digitalWrite(12, HIGH);
delayMicroseconds(10);
digitalWrite(12, LOW);
float distance = pulseIn(13, HIGH) / 58.00;
delay(10);
return distance;
}
void yushu_0() {
digitalWrite(9, HIGH);
digitalWrite(10, LOW);
digitalWrite(11, LOW);
delay(300);
digitalWrite(9, LOW);
digitalWrite(10, HIGH);
digitalWrite(11, LOW);
delay(300);
digitalWrite(9, LOW);
digitalWrite(10, LOW);
digitalWrite(11, HIGH);
delay(300);
}
void yushu_1() {
if (IrReceiver.decode()) { // 判断是否接收到信号
// 打印原始数据值
Serial.println(IrReceiver.decodedIRData.decodedRawData, HEX); // 注意访问方式
IrReceiver.resume(); // 必须调用,准备接收下一个信号
}
}
void yushu_2() {
int chk;
chk = DHT.read(DHT11_PIN); // READ DATA
switch (chk) {
case DHTLIB_OK:
break;
case DHTLIB_ERROR_CHECKSUM: //校检和错误返回
break;
case DHTLIB_ERROR_TIMEOUT: //超时错误返回
break;
default:
break;
}
// DISPLAT DATA
Serial.print("humidity:");
Serial.print(DHT.humidity);
Serial.print(" temperature:");
Serial.println(DHT.temperature);
delay(200);
}
void yushu_3() {
x = analogRead(A0);
y = analogRead(A1);
button = digitalRead(7);
Serial.print("X:");
Serial.print(x);
Serial.print(" Y:");
Serial.print(y);
Serial.print(" B:");
Serial.println(button);
delay(100);
}
void yushu_4() {
ADXL345_X = accel.getAccelerationX();
ADXL345_Y = accel.getAccelerationY();
ADXL345_Z = accel.getAccelerationZ();
Serial.print("ADXL345_X:");
Serial.print(ADXL345_X);
Serial.print(" ADXL345_Y:");
Serial.print(ADXL345_Y);
Serial.print(" ADXL345_Z:");
Serial.println(ADXL345_Z);
delay(50);
}
void yushu_5() {
val3 = analogRead(A3);
val4 = map(val3, 0, 1023, 0, 255);
Serial.println(val4);
analogWrite(5, val4);
delay(100);
}
void yushu_6() {
val5 = analogRead(A2);
Serial.println(val5);
delay(100);
}
void yushu_7() {
distance = checkdistance_12_13();
Serial.print("distance:");
Serial.print(distance);
Serial.println("cm");
delay(100);
}
void setup() {
pinMode(2, INPUT);
pinMode(9, OUTPUT);
pinMode(10, OUTPUT);
pinMode(11, OUTPUT);
Serial.begin(9600);
Wire.begin();
accel.initialize();
IrReceiver.begin(RECV_PIN, ENABLE_LED_FEEDBACK); // 启动接收,并开启LED反馈
pinMode(7, INPUT);
pinMode(12, OUTPUT);
pinMode(13, INPUT);
}
void loop() {
State = digitalRead(2);
if (State != LastState) {
if (State == 0) {
PushCounter = PushCounter + 1;
}
}
LastState = State;
PushCounter1 = (long)(PushCounter) % (long)(8);
if (PushCounter1 == 0) {
yushu_0();
} else if (PushCounter1 == 1) {
yushu_1();
} else if (PushCounter1 == 2) {
yushu_2();
} else if (PushCounter1 == 3) {
yushu_3();
} else if (PushCounter1 == 4) {
yushu_4();
} else if (PushCounter1 == 5) {
yushu_5();
} else if (PushCounter1 == 6) {
yushu_6();
} else if (PushCounter1 == 7) {
yushu_7();
}
}
5.代码说明#
设置时,计算出按下按键的次数,除以8,得到余数,为0 1 2 3 4 5 6 7,根据不同的余数,控制实验实现不同功能。
实验中,对应功能,都利用了子程序设置。子程序设置方法,可以参考前面章节实验。
参照介绍方法,可以在接线中添加或减少传感器/模块,然后在代码中更改实验功能。
6.测试结果#
上传测试代码成功,按照接线图接好线,利用USB上电。
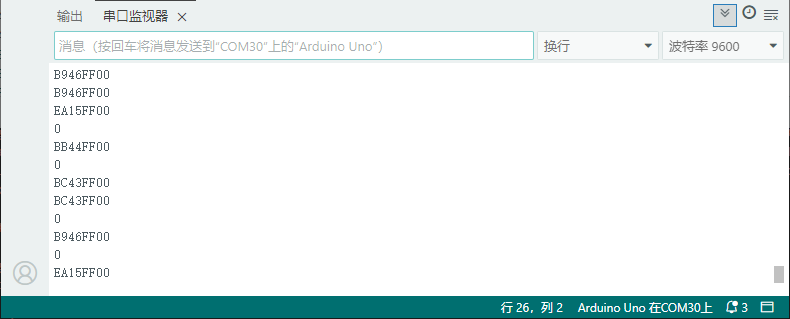
刚开始时,按键次数为0,余数为0,RGB模块上LED循环闪烁红绿蓝三种颜色。点击打卡串口监视器,设置波特率为9600,按一下按键(时间长些),按键次数为1,余数为1,RGB模块上LED显示蓝色,实验实现的功能是红外接收模块红外发射信息。如果利用红外遥控对准接收模块接收头,按下按键,红外接收头接收到信息,串口监视器显示如下。
特别注意:如果先按下按键,按键次数变为1,再打开串口监视器时,程序会复位,按键成次数会变为0,需要再按下按键重新设置按键次数。
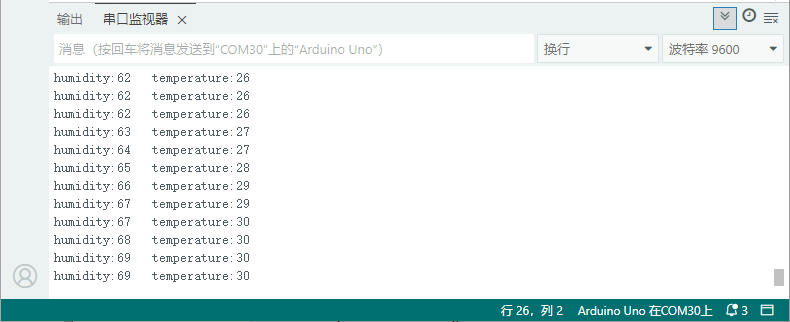
再按一下按键,按键次数为2,余数为2,实验实现的功能是利用DHT11温湿度传感器读取环境中的温湿度数值,每0.1秒读取一次,串口监视器显示数据如下图。
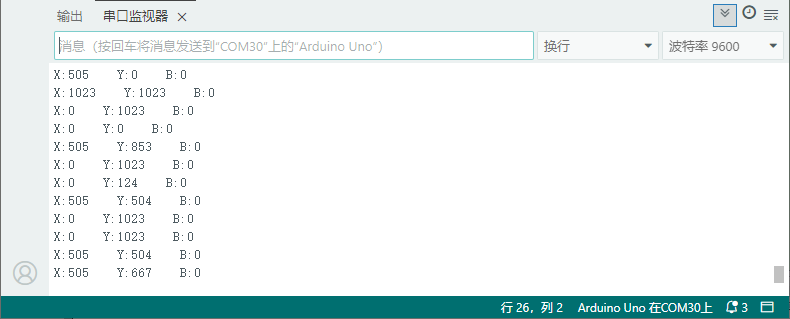
再按一下按键,按键次数为3,余数为3,实验实现的功能是读取摇杆模块传感器X轴和Y轴对应的模拟值,B(Z轴)接口对应的数字值,串口监视器显示如下图。
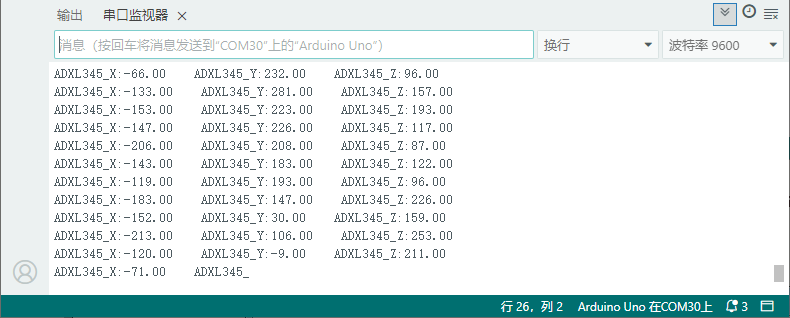
再按一下按键,按键次数为4,余数为4,实验实现的功能是利用ADXL345加速度传感器测试X Y Z 3轴加速度数值,单位为g,串口监视器显示如下图。
再按一下按键,按键次数为5,余数为5,实验实现的功能是利用外接可调电位器模块调节D5接口的PWM值,从而调节外接的LED白发白模块上LED的亮度。串口监视器显示图下图。
再按一下按键,按键次数为6,余数为6,实验实现的功能是利用外接TEMT6000光线传感器输出模拟值,串口监视器显示图下图。

再按一下按键,按键次数为7,余数为7,实验实现的功能是利用超声波模块检测距离并在串口打印出来,串口监视器显示图下图。
再按一下按键,按键次数为8,余数为0,实现初始时的现象。不断按下按键,余数循环变化,实验功能也循环变化。