项目三十六 舵机控制#
1.实验说明#
舵机是一种位置伺服的驱动器,主要是由外壳、电路板、无核心马达、齿轮与位置检测器所构成。舵机有很多规格,但所有的舵机都有外接三根线,分别用棕、红、橙三种颜色进行区分,由于舵机品牌不同,颜色也会有所差异,棕色为接地线,红色为电源正极线,橙色为信号线。
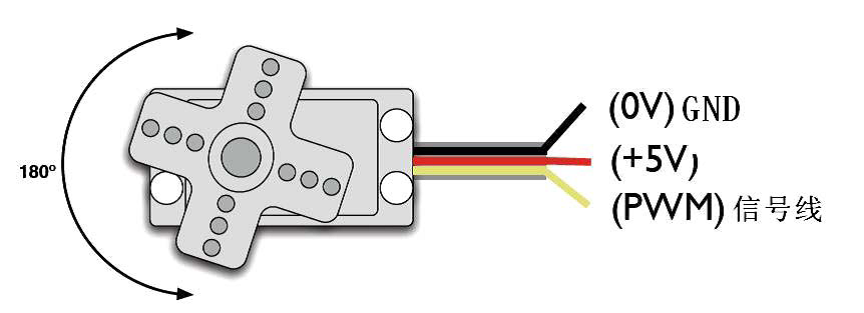
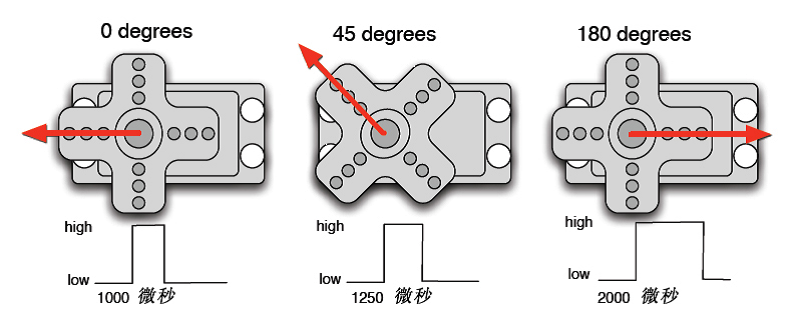
舵机的转动的角度是通过调节PWM(脉冲宽度调制)信号的占空比来实现的,标准PWM(脉冲宽度调制)信号的周期固定为20ms(50Hz),理论上脉宽分布应在1ms到2ms之间,但是,事实上脉宽可由0.5ms 到2.5ms 之间,脉宽和舵机的转角0°~180°相对应。有一点值得注意的地方,由于舵机牌子不同,对于同一信号,不同牌子的舵机旋转的角度也会有所不同。
2.实验器材#
keyes 伺服舵机*1
keyes UNO R3开发板*1
传感器扩展板*1
USB线*1
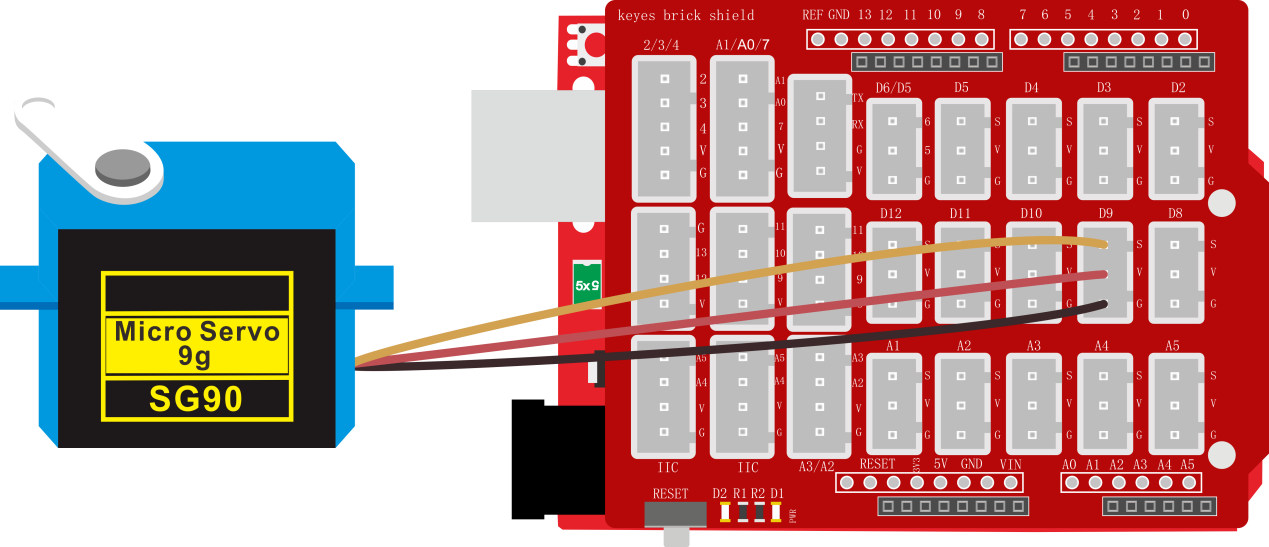
3.接线图#
4.测试代码#
代码1:
int servoPin = 9;//舵机的PIN
void setup()
{
pinMode(servoPin, OUTPUT);//舵机引脚设置为输出
}
void loop()
{
servopulse(servoPin, 0);//转动到0度
delay(1000);//延时1秒
servopulse(servoPin, 90);//转动到90度
delay(1000);
servopulse(servoPin, 180);//转动到180度
delay(1000);
}
void servopulse(int pin, int myangle) //脉冲函数
{
int pulsewidth = map(myangle, 0, 180, 500, 2500); //将角度映射到脉宽
for (int i = 0; i < 5; i++) //输出脉冲
{
digitalWrite(pin, HIGH);//将舵机接口电平至高
delayMicroseconds(pulsewidth);//延时脉宽值的微秒数
digitalWrite(pin, LOW);//将舵机接口电平至低
delay(20 - pulsewidth / 1000);
}
}
代码2:
#include <Servo.h> //舵机库
Servo myservo;
void setup()
{
myservo.attach(9);//舵机连接数字口9
}
void loop()
{
for (int pos = 0; pos < 180; pos++)
{
myservo.write(pos); //转动到pos角度
delay(15); //加延时转慢一点
}
for (int pos = 180; pos > 0; pos--)
{
myservo.write(pos);
delay(15);
}
delay(2000);//等待2秒
}
5.代码1说明#
map(value, fromLow, fromHigh, toLow, toHigh);
value为要映射的值;fromHigh为当前值的下限和上限;toHigh为我们要映射到的目标范围的下限和上限。比如在实验中map(myangle, 0, 180, 500, 2500)的意思就是传进来一个需要转动的角度值为myangle,然后这个值的范围是0度到180度,要映射的范围为500us到2500us,即把0到180转到了500到2500然后被返回了,返回的数据类型为整型,余数会被截断,不进行四舍五入或平均。
之后定义的的函数servopulse()就能让舵机转动了,代码中设置了让舵机从0度转动到90度再转动到180度,再转动到0度,中间暂停一秒,反复循环。
6.代码2说明#
首先先添加舵机库,不然不能编译。
这个库的方法.attach()方法是连接舵机引脚,连到9,10也可以,这里面用到了定时器,使用其他管脚可能会出现冲突。
myservo.write(pos)为转动到pos角度值。myservo.read()是读取舵机当前角度值。
其他设置请参照前面相关的代码说明。
7.测试结果#
实验1 结果:
上传测试代码成功,利用USB线上电后,舵机由0度,90度,180度三个角度来回转动。
实验2 结果:
上传测试代码成功,利用USB线上电后,舵机由0~180度来回转动,并且每次转动一度。