项目二十二 超声波测距#
1.实验说明#
在这个套件中,有一个HC-SR04超声波传感器,它可以检测前方是否存在障碍物,并且检测出传感器与障碍物的详细距离。它的原理和蝙蝠飞行的原理一样,就是超声波模块发送出一种频率很高,人体无法听到的超声波信号。这些超声波的信号若是碰到障碍物,就会立刻反射回来,在接收到返回的信息之后,通过判断发射信号和接收信号的时间差,计算出传感器和障碍物的距离。
实验中,利用传感器检测传感器和障碍物之间的距离,将测试结果在串口监视器上显示。
2.实验器材#
keyes brick HC-SR04超声波传感器*1
keyes UNO R3开发板*1
传感器扩展板*1
4P 双头XH2.54连接线*1
USB线*1
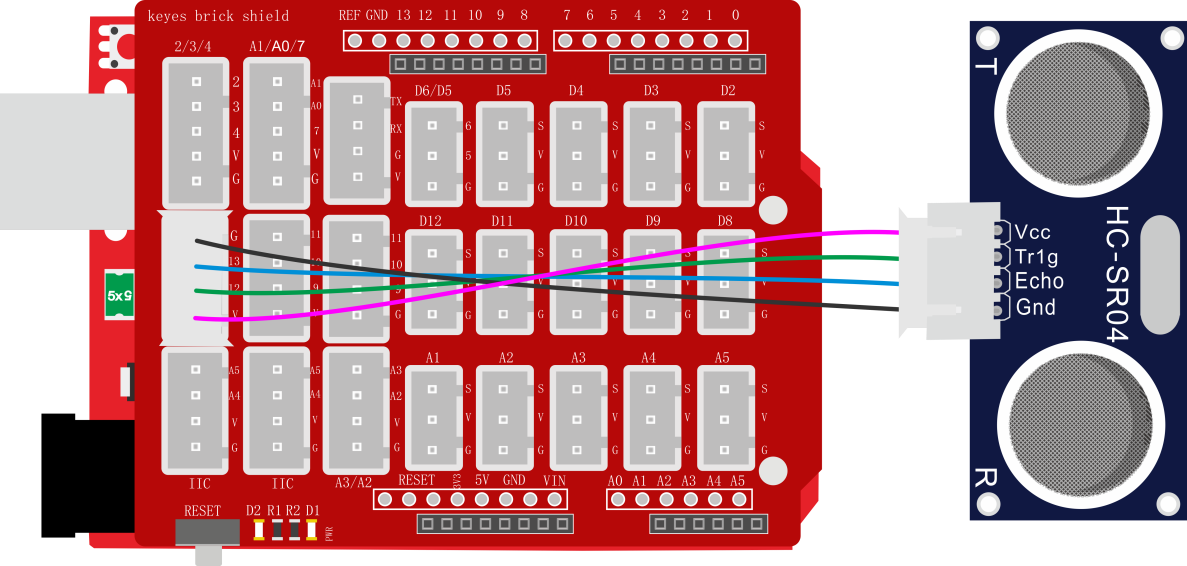
3.接线图#
4.测试代码#
int distance = 0; //定义一个用来接收距离的变量
int EchoPin = 13; //Echo引脚接D13
int TrigPin = 12; //Trig引脚接D12
float checkdistance() //获取距离
{
// Give a short LOW pulse beforehand to ensure a clean HIGH pulse:
digitalWrite(TrigPin, LOW);
delayMicroseconds(2);
// The sensor is triggered by a HIGH pulse of 10 or more microseconds.
digitalWrite(TrigPin, HIGH);
delayMicroseconds(10);
digitalWrite(TrigPin, LOW);
// Read the signal from the sensor: a HIGH pulse whose
// duration is the time (in microseconds) from the sending
// of the ping to the reception of its echo off of an object.
float distance = pulseIn(EchoPin, HIGH) / 58.00;
delay(10);
return distance;
}
void setup()
{
Serial.begin(9600);//设置波特率为9600
pinMode(TrigPin, OUTPUT);//Trig引脚为输出
pinMode(EchoPin, INPUT); //Echo引脚为输入
}
void loop()
{
distance = checkdistance();
if (distance < 2 || distance >= 400) //在范围外打印"-1"
{
Serial.println("-1");
delay(100);
}
else //打印距离,单位厘米
{
Serial.print("distance:");
Serial.print(distance);
Serial.println("cm");
delay(100);
}
}
5.代码说明#
HC-SR04超声波传感器最大测试距离为3-4m,最小测试距离为2cm。设置代码当检测距离小于2cm或者大于等于400cm时,串口监视器显示-1。在电脑的串口监视器中显示除传感器和障碍物之间的距离。
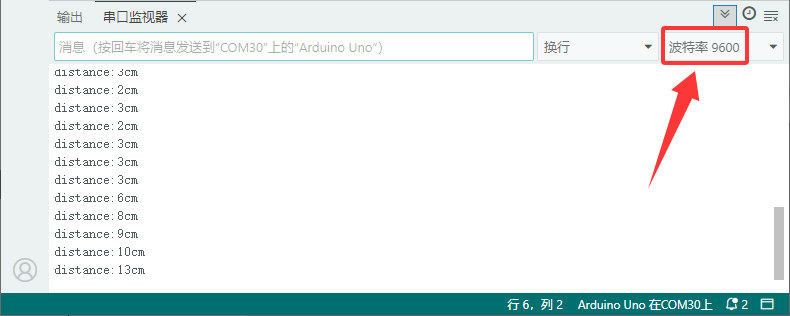
6.测试结果#
上传测试代码成功,利用USB线上电后,打开串口监视器,设置波特率为9600。如果障碍物在测试范围外,串口监视器显示“-1”;否则,串口监视器显示超声波传感器和前方障碍物之间的距离,单位为cm,如下图。