项目二十 旋转编码器模块计数#
1.实验说明#
在这个套件中,有一个keyes brick旋转编码器模块,它主要采用20脉冲旋转编码器元件。它可通过旋转计数正方向和反方向转动过程中输出脉冲的次数,这种转动计数是没有限制的,复位到初始状态,即从0开始计数。如果只计算信号的脉冲,则可以使用两个输出中的任何一个来确定旋转位置。但是,如果想要确定旋转方向,需要同时考虑两个信号。
实验中,利用keyes brick旋转编码器模块用于计数,当顺时针旋转编码器时,设置数据i加1;逆时针旋转编码器时,设置数据i减1;按下编码器中间按键时,设置数据i为0;将测试结果在串口监视器上显示。
2.实验器材#
keyes brick 旋转编码器模块*1
keyes UNO R3开发板*1
传感器扩展板*1
5P双头XH2.54连接线*1
USB线*1
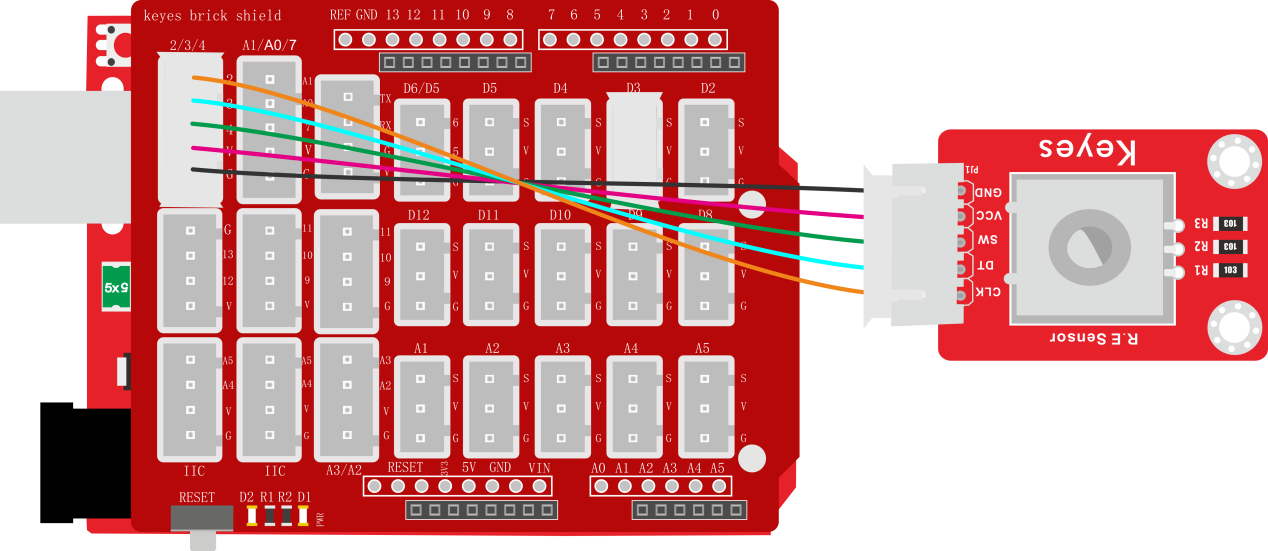
3.接线图#
4.测试代码#
编译上传之前我们先安装库文件Encoder.h,安装方法请看到Arduino 基础教程中查看。
#include <Encoder.h>//导入编码器的库
int item = 0;
int old = 0;
Encoder encoder(2, 3);
int button = 4;
void setup()
{
Serial.begin(9600);//设置波特率
pinMode(button, INPUT);//按键为输入模式
}
void loop()
{
item = encoder.read();//读取编码器的值赋给item
if (digitalRead(button) == 0) //如果按键按下
{
Serial.println(digitalRead(button));//打印按键值
delay(100);
}
if (old != item) //与之前读取的值不一样
{
Serial.println(item);//打印编码器的值
old = item;
}
}
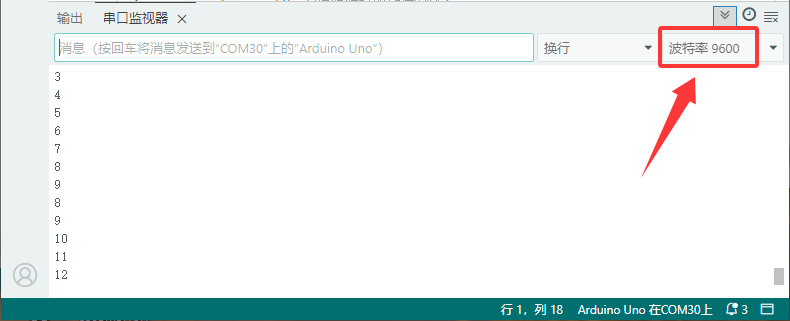
5.测试结果#
上传测试代码成功,利用USB线上电后,打开串口监视器,设置波特率为9600。顺时针旋转编码器,显示数据减小;逆时针旋转编码器,显示数据增加;按下编码器中间按键,显示数据为0,如下图。