项目十八 魔术光杯传感器#
1.实验说明#
在这个套件中,有两个keyes brick魔术光杯传感器,它的原理是利用PWM调光的原理,两个传感器的亮度发生变化。滚珠开关提供数字信号,触发PWM的调节,通过程序的设计,可以看到类似于两组装满光的杯子倒来倒去的效果了。
实验中,通过读取传感器上S端高低电平,判断传感器的倾斜方向,然后控制传感器上LED的亮度变化(调节L端的PWM值)。
2.实验器材#
keyes brick魔术光杯传感器*2
keyes UNO R3开发板*1
传感器扩展板*1
4P双头XH2.54连接线*2
USB线*1
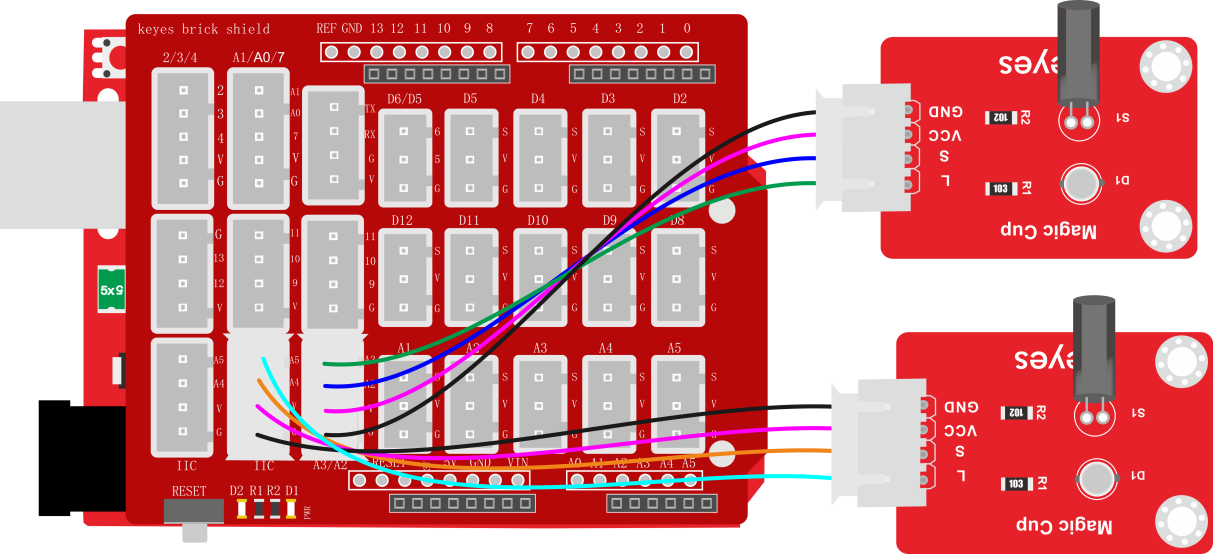
3.接线图#
4.测试代码#
int buttonStateA = 0;//模块1的状态
int buttonStateB = 0;//模块2的状态
int brightnessA = 0;//模块1的亮度
int brightnessB = 1000;//模块2的亮度
int sensor1=A2,sensor2=A4;//模块1传感器接A2,模块2传感器接A4
int led1=A3,led2=A5;//模块1led接A3,模块2led接A5
void PWMA(int val1) //输出模拟值val
{
for (int i = 1; i <= 5; i = i + 1)
{
digitalWrite(led1, HIGH);
delayMicroseconds(val1);
digitalWrite(led1, LOW);
delayMicroseconds(1000 - val1);
}
}
void PWMB(int val2) //输出模拟值val2
{
for (int i = 1; i <= 5; i = i + 1)
{
digitalWrite(led2, HIGH);
delayMicroseconds(val2);
digitalWrite(led2, LOW);
delayMicroseconds(1000 - val2);
}
}
void setup()
{
Serial.begin(9600);//设置波特率为9600
pinMode(sensor1, INPUT);//传感器1输入模式
pinMode(led1,OUTPUT);//LED1输出模式
pinMode(sensor2, INPUT);//传感器2输入模式
pinMode(led2,OUTPUT);//LED2输出模式
}
void loop()
{
buttonStateA = digitalRead(sensor1);//读取传感器1的转态
buttonStateB = digitalRead(sensor2);//读取传感器2的转态
if (buttonStateA == 1 && brightnessA != 1000) //如果传感器1的转态为1,但亮度不到1000
{
brightnessA = brightnessA + 1;//变亮
}
else if (buttonStateA == 0 && brightnessA != 0)
{//如果传感器1的转态为0,但亮度不到0
brightnessA = brightnessA - 1;//变暗
}
if (buttonStateB == 1 && brightnessB != 0)
{//如果传感器2的转态为1,但亮度不到0
brightnessB = brightnessB - 1;//变暗
}
else if (buttonStateB == 0 && brightnessB != 1000) //如果传感器2的转态为0,但亮度不到1000
{
brightnessB = brightnessB + 1;//变亮
}
//打印出两个模块的亮度值
Serial.print(brightnessA);
Serial.print(" ");
Serial.println(brightnessB);
if (brightnessA == 0) //当LED1亮度为0
{
digitalWrite(led1, LOW);//熄灭
}
else if (brightnessA == 1000) //当LED1亮度为1000
{
digitalWrite(led1, HIGH);//最亮
}
else if (buttonStateA > 0 && brightnessA < 1000) //否则亮度在中间的话
{
PWMA(brightnessA);//输出模拟值
}
//下同
if (brightnessB == 0)
{
digitalWrite(led2, LOW);
}
else if (brightnessB == 1000)
{
digitalWrite(led2, HIGH);
}
else if (brightnessB > 0 && brightnessB < 1000)
{
PWMB(brightnessB);
}
}
5.代码说明#
PWMA()子程序,,模拟PWM口的PWM值,设置方波,设置高低电平延迟时间总共为1000微妙,即周期为1毫秒,频率是1000Hz。设置是PWM值就相当于设置方波时高电平的延迟时间(val1和val2)。
delayMicroseconds(us),延时函数,与delay()不同的是,该函数参数us为微秒,代表延迟微秒数。
设置程序逻辑如下表格
条件 |
设置 |
|---|---|
数字口A2(buttonStateA)为高电平并且brightnessA不是1000 |
brightnessA设置为brightnessA加1(最大1000) |
数字口A2(buttonStateA)为低电平并且brightnessA不是0 |
brightnessA设置为brightnessA减1(最小0) |
数字口A4(buttonStateB)为高电平并且brightnesB不是0 |
brightnessB设置为brightnessB减1(最小0) |
数字口A4(buttonStateB)为低电平并且brightnessB不是1000 |
brightnessB设置为brightnessB加1(最大1000) |
brightnessA为0 |
设置数字口A3为低电平 |
brightnessA为1000 |
设置数字口A3为高电平 |
brightnessA大于0且小于1000 |
利用数字口A3模拟PWM口,设置A3的PWM值为brightnessA |
brightnessB为0 |
设置数字口A5为低电平 |
brightnessB为1000 |
设置数字口A5为高电平 |
brightnessB大于0且小于1000 |
利用数字口A5模拟PWM口,设置A5的PWM值为brightnessB |
6.测试结果#
上传测试代码成功,利用USB线上电后,打开串口监视器,设置波特率为9600。将两个魔术光杯传感器同时倾斜一边,一个魔术光杯上的LED逐渐变暗,同时另一个逐渐变亮,最终一个LED完全熄灭,一个LED最亮;在串口监视器中看到对应具体数值变化,如下图。当倾斜另一边中,现象一样,方向相反。
