4. 智能车安装#
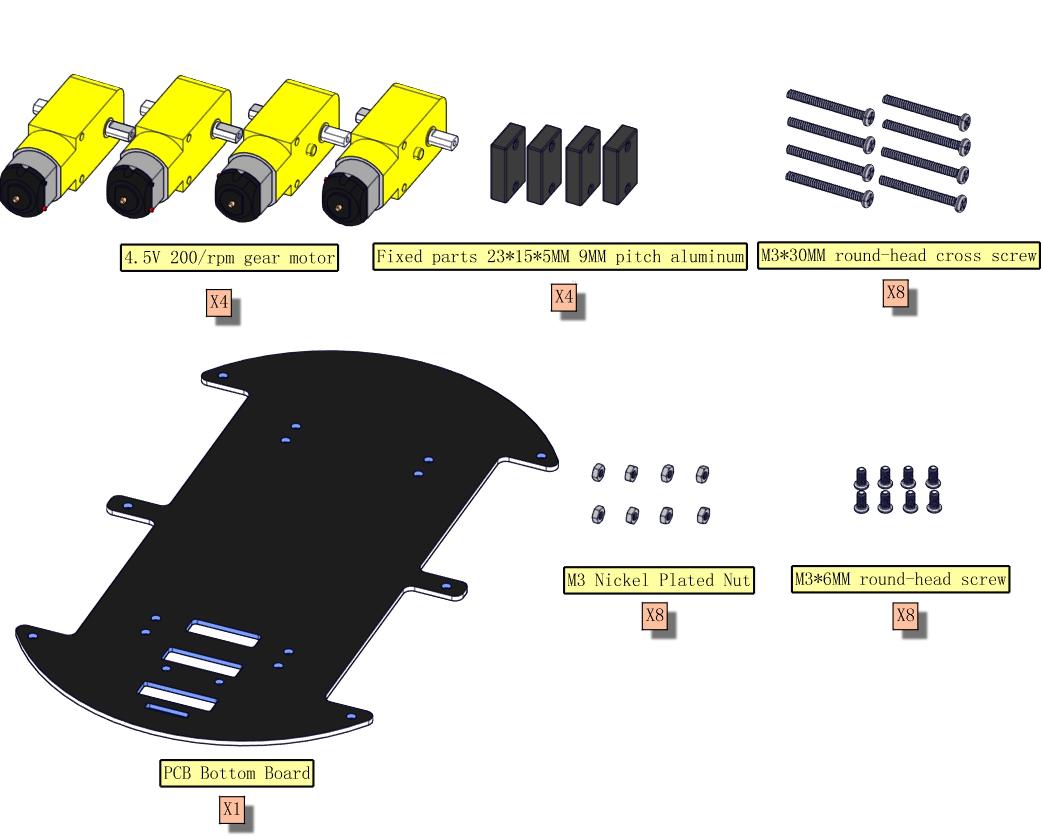
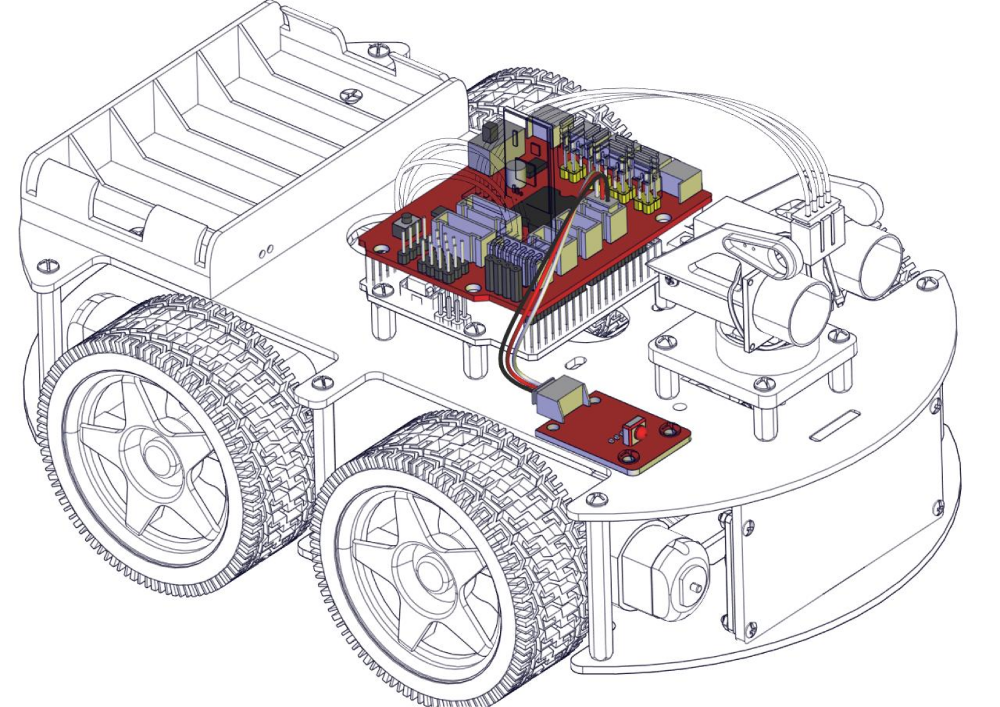
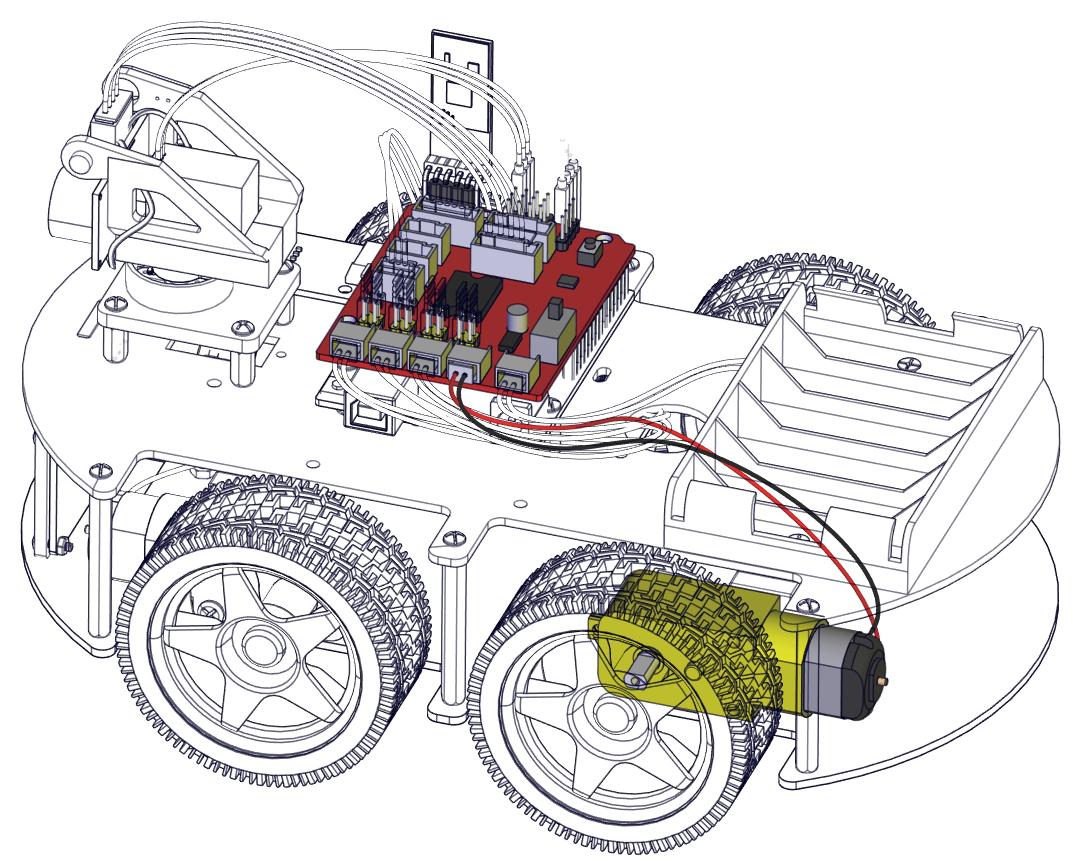
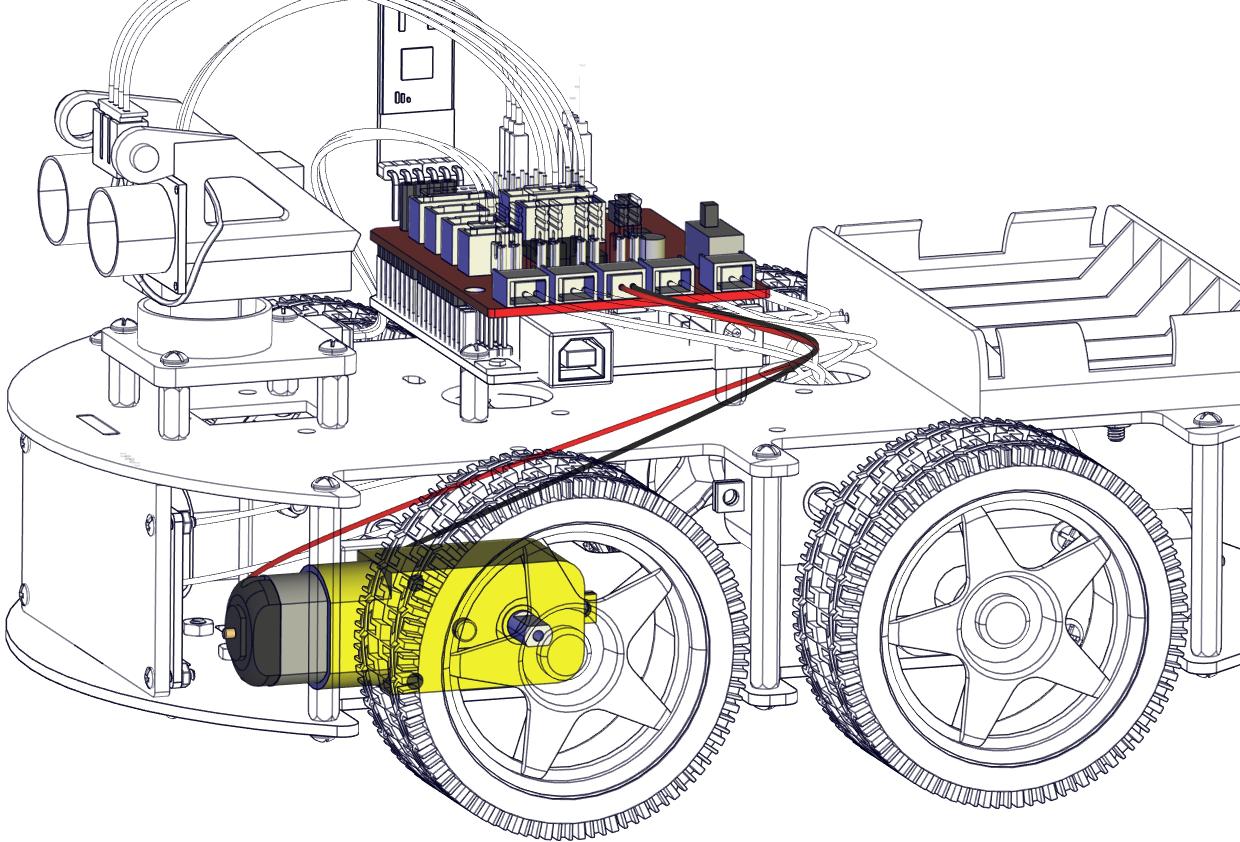
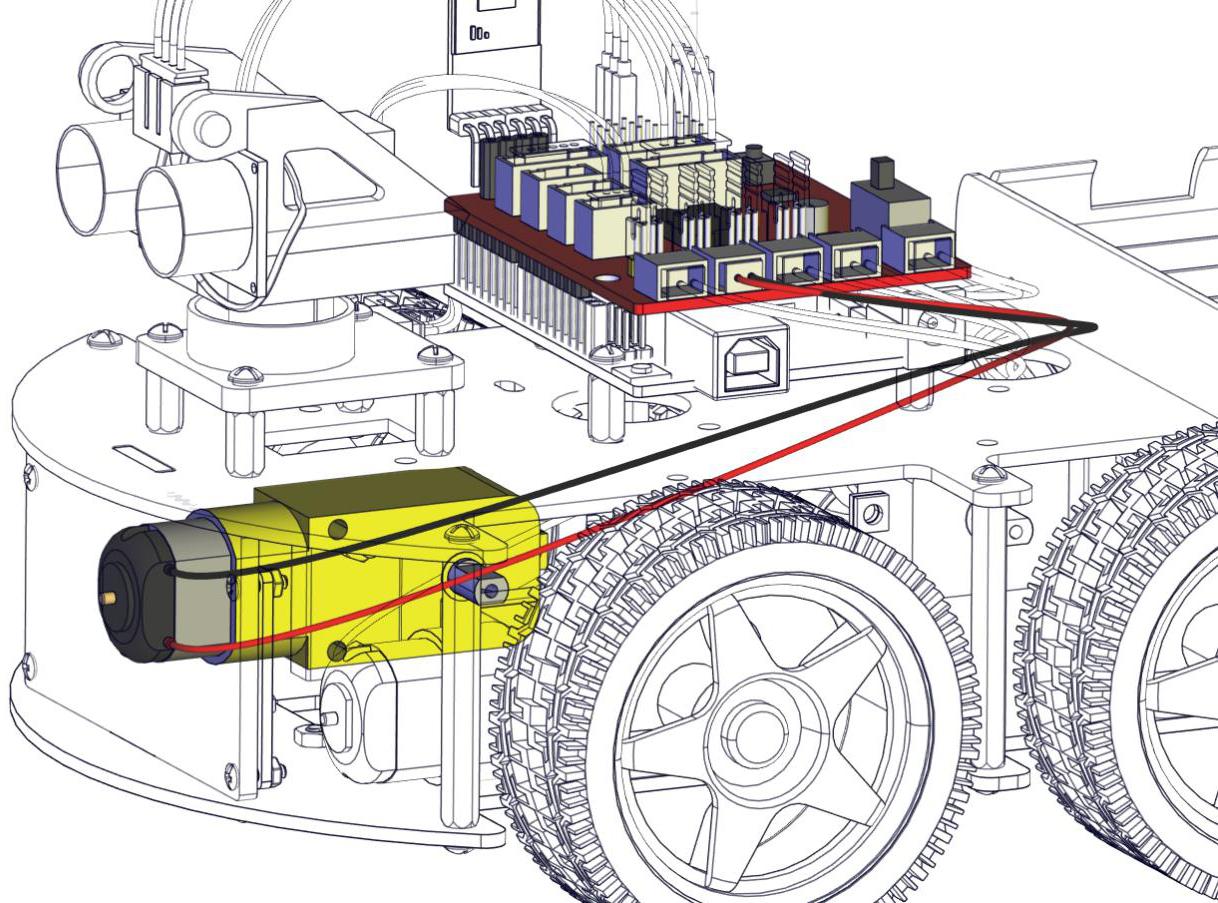
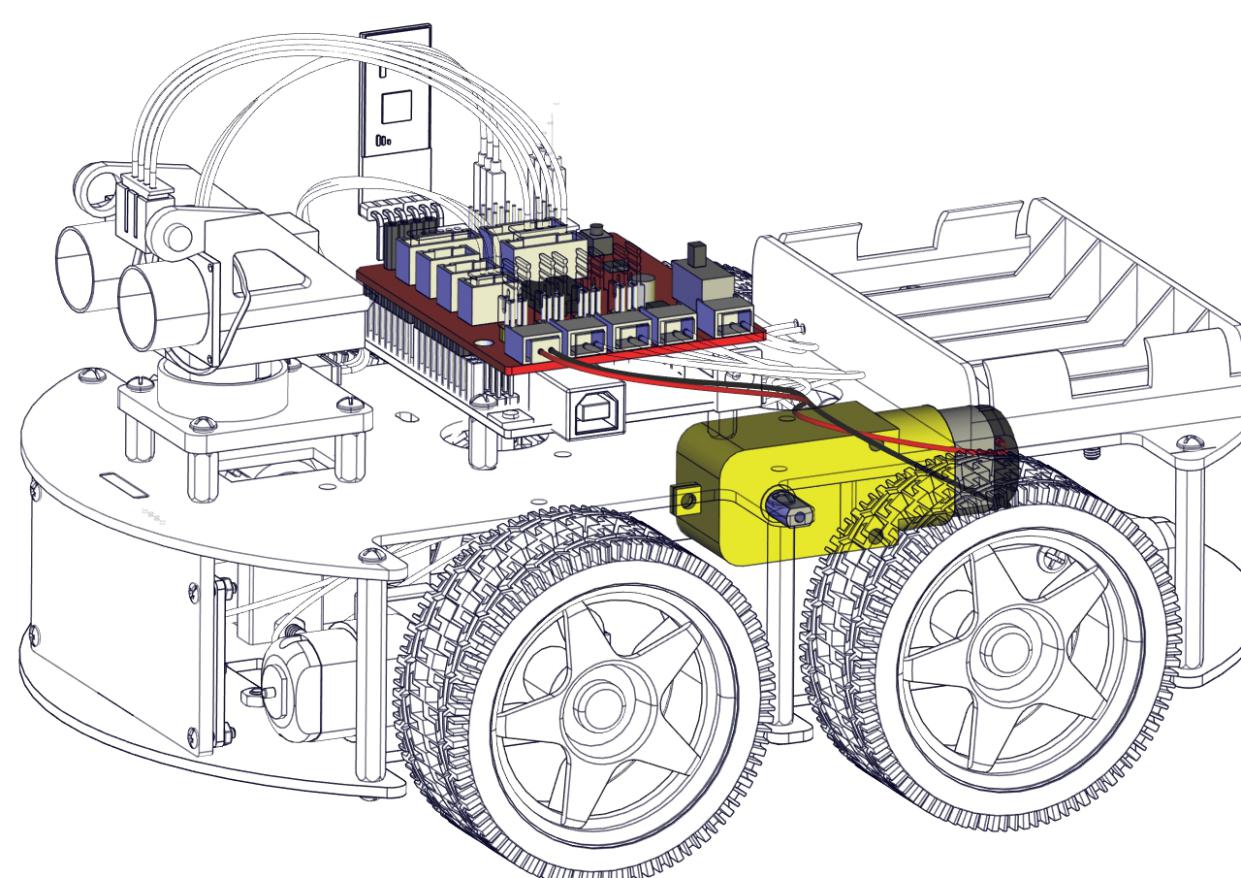
4.1 电机安装#
安装所需零件
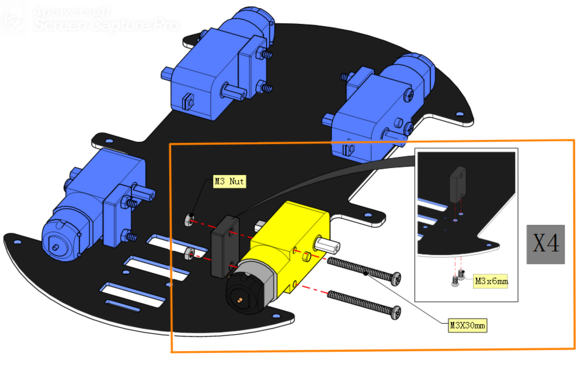
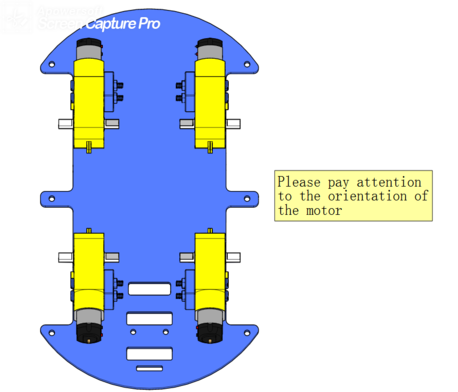
安装(注意电机应对号入座在黄色框内)
完成
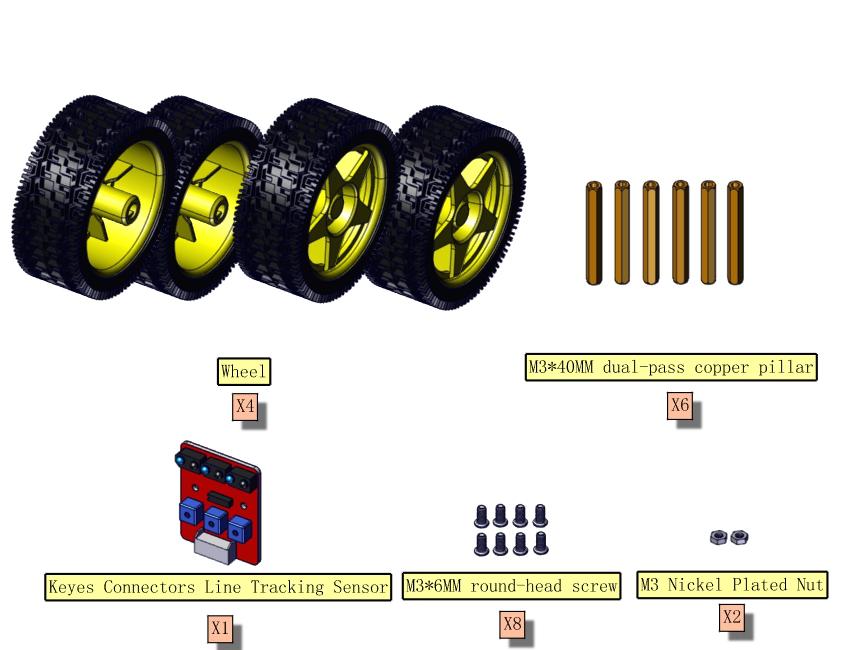
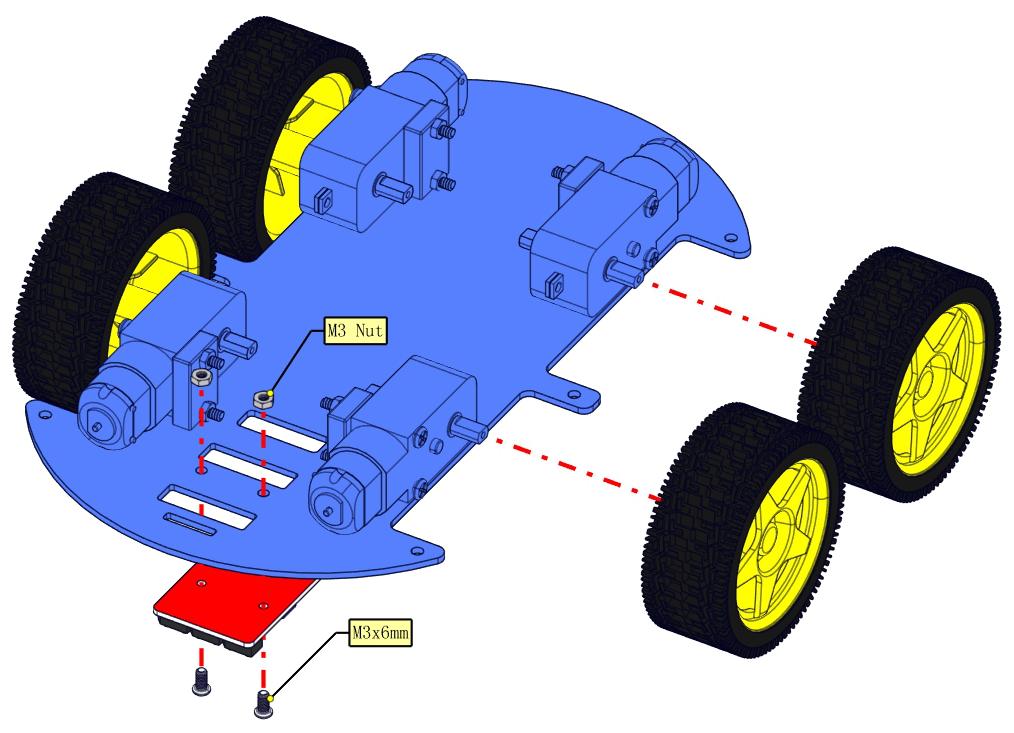
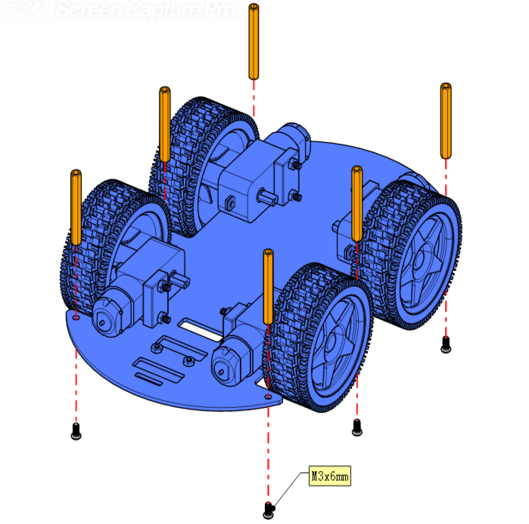
4.2 车轮与巡线传感器安装#
安装所需零件
分步安装1
分步安装2
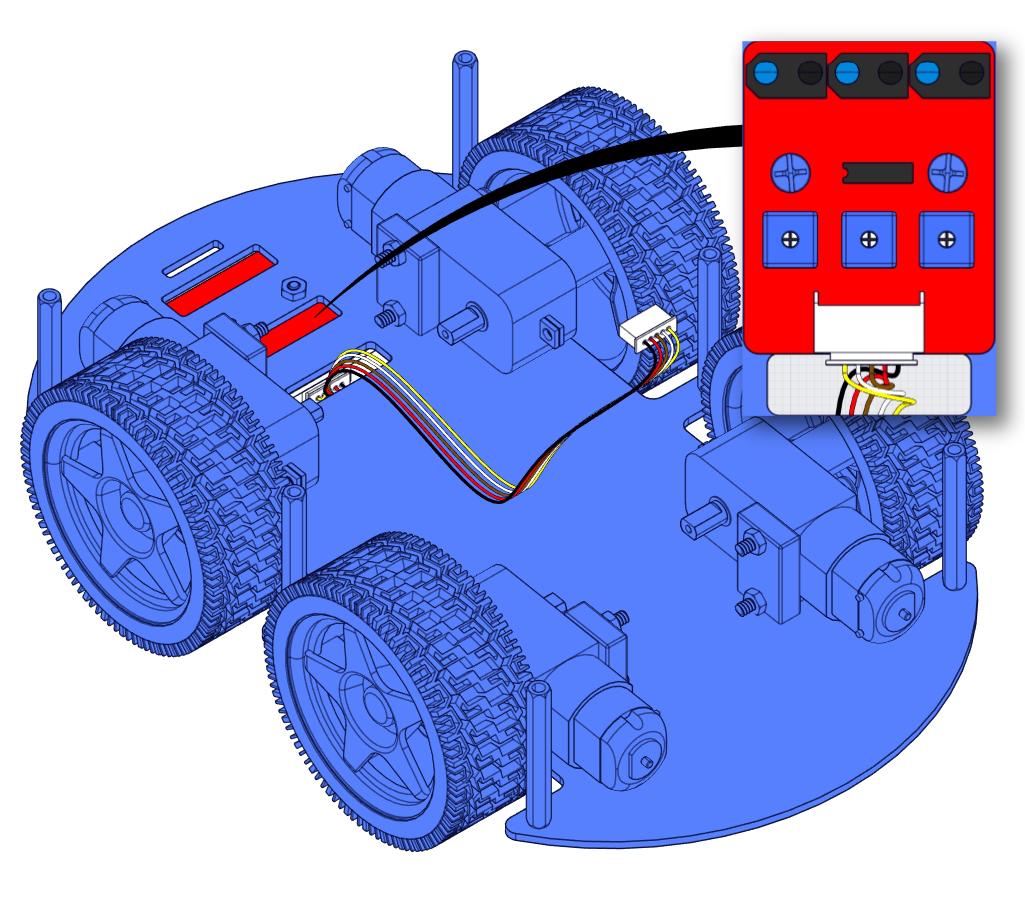
循迹传感器插线示意图
完成
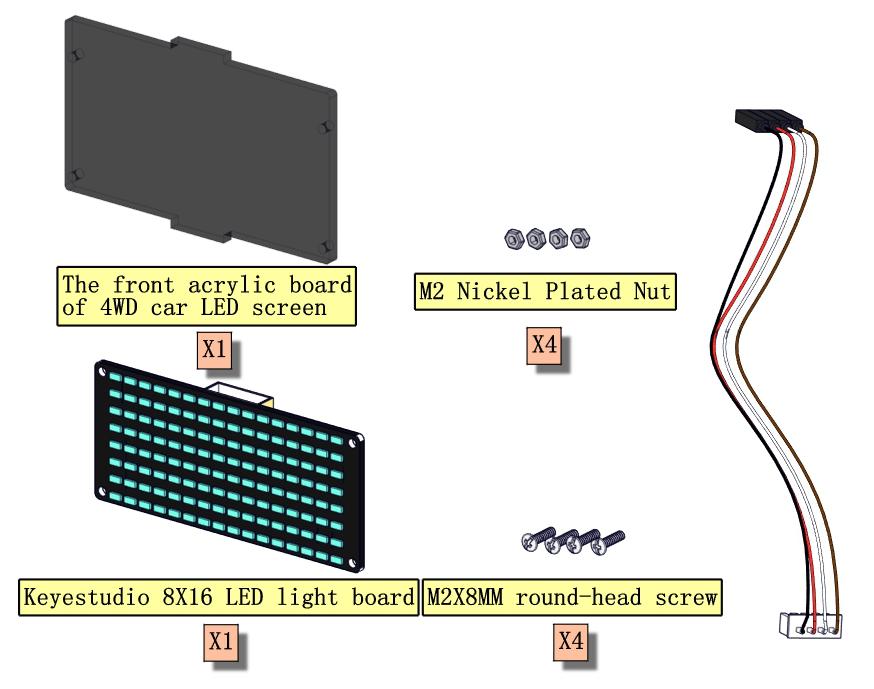
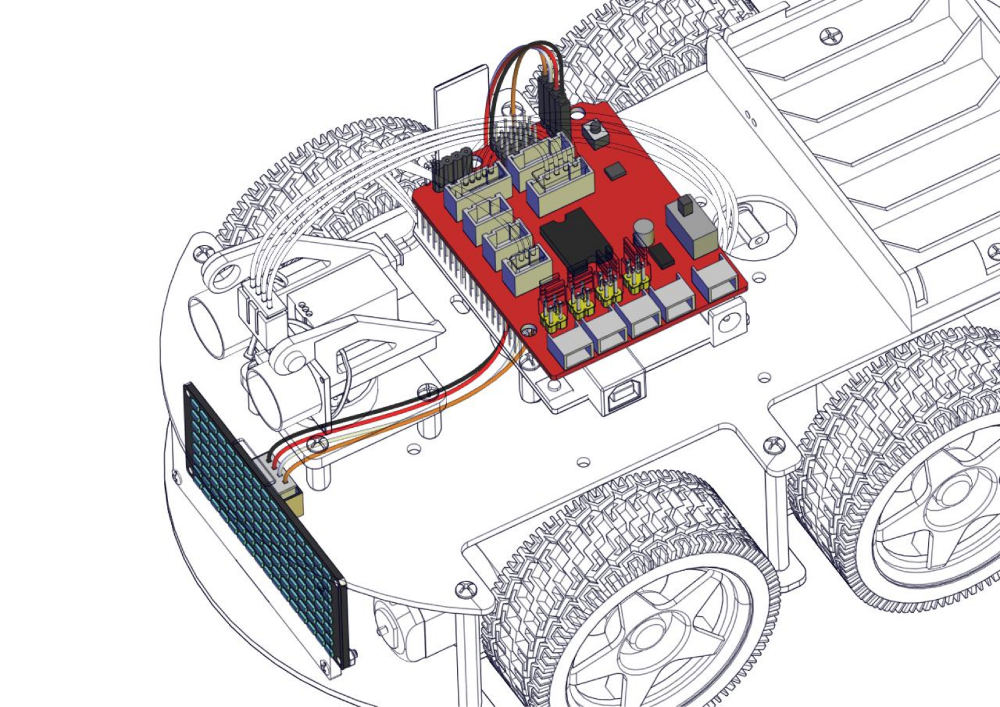
4.3 点阵安装#
安装所需零件
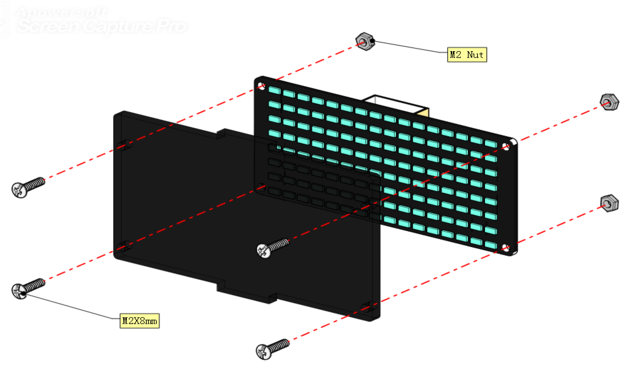
安装
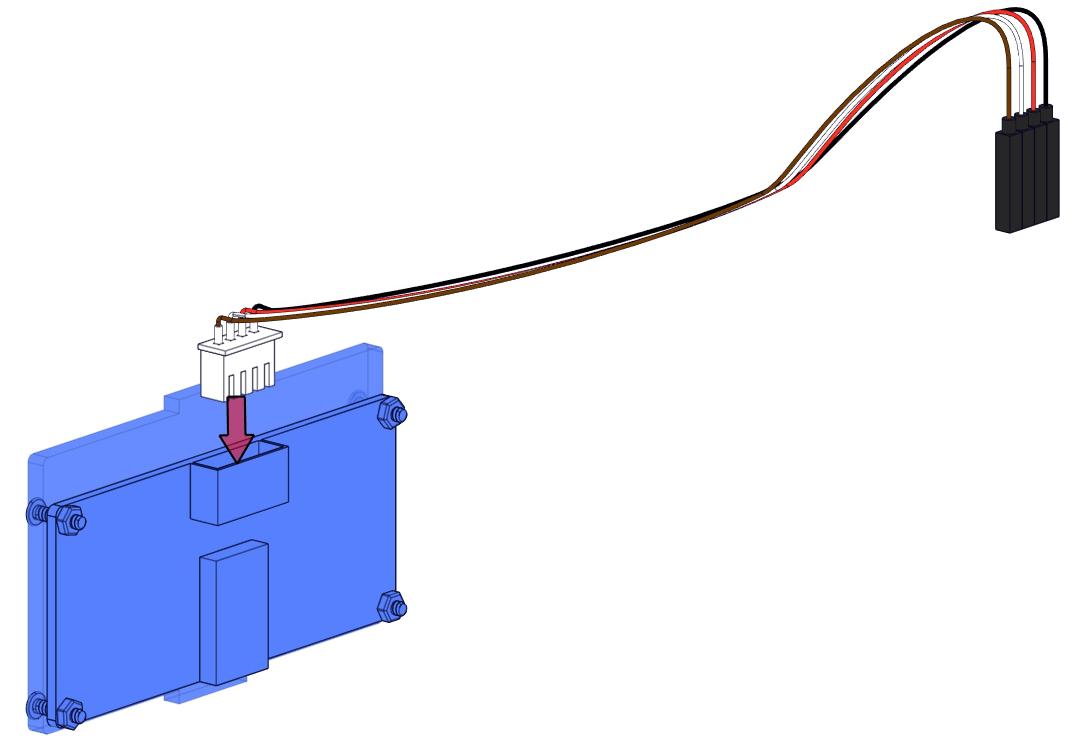
插线
完成
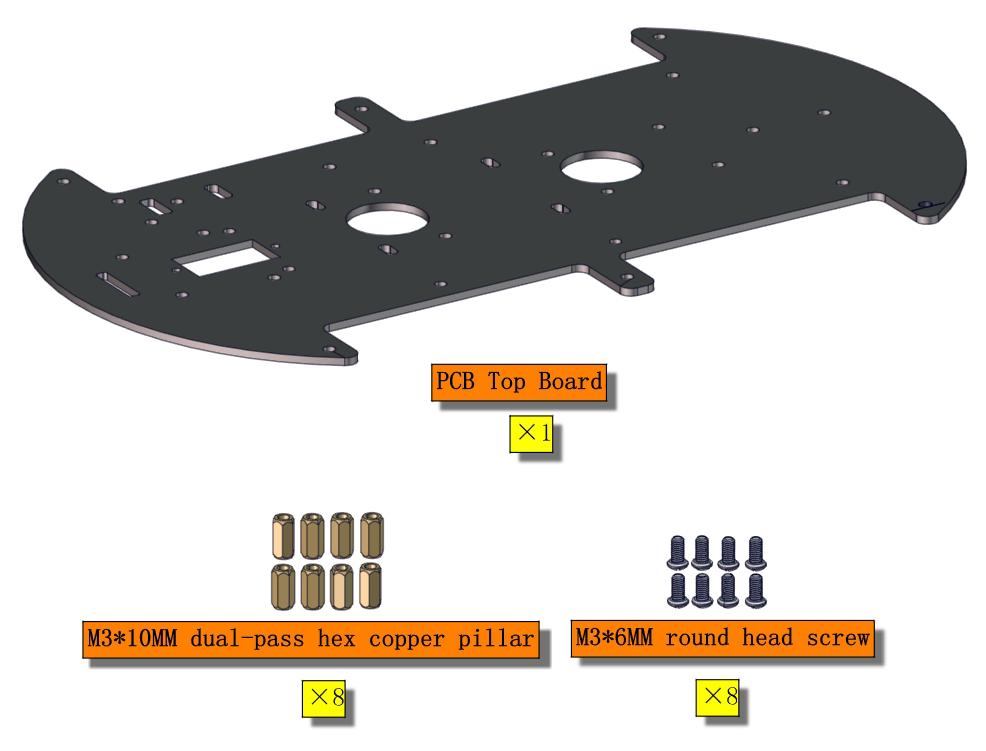
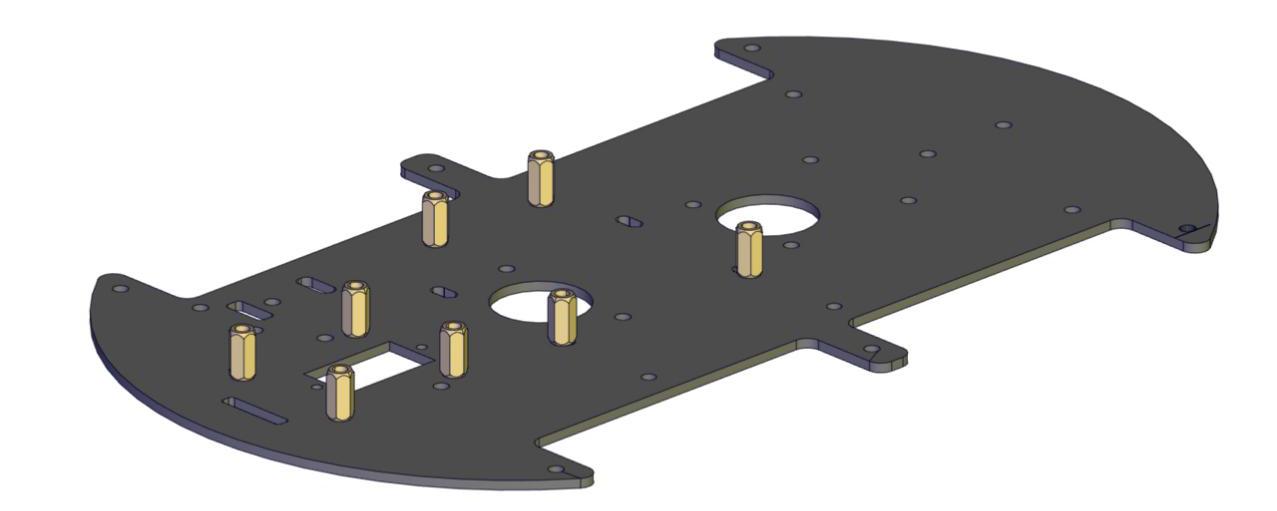
4.4 M3x10铜柱安装#
安装所需零件
安装<h1 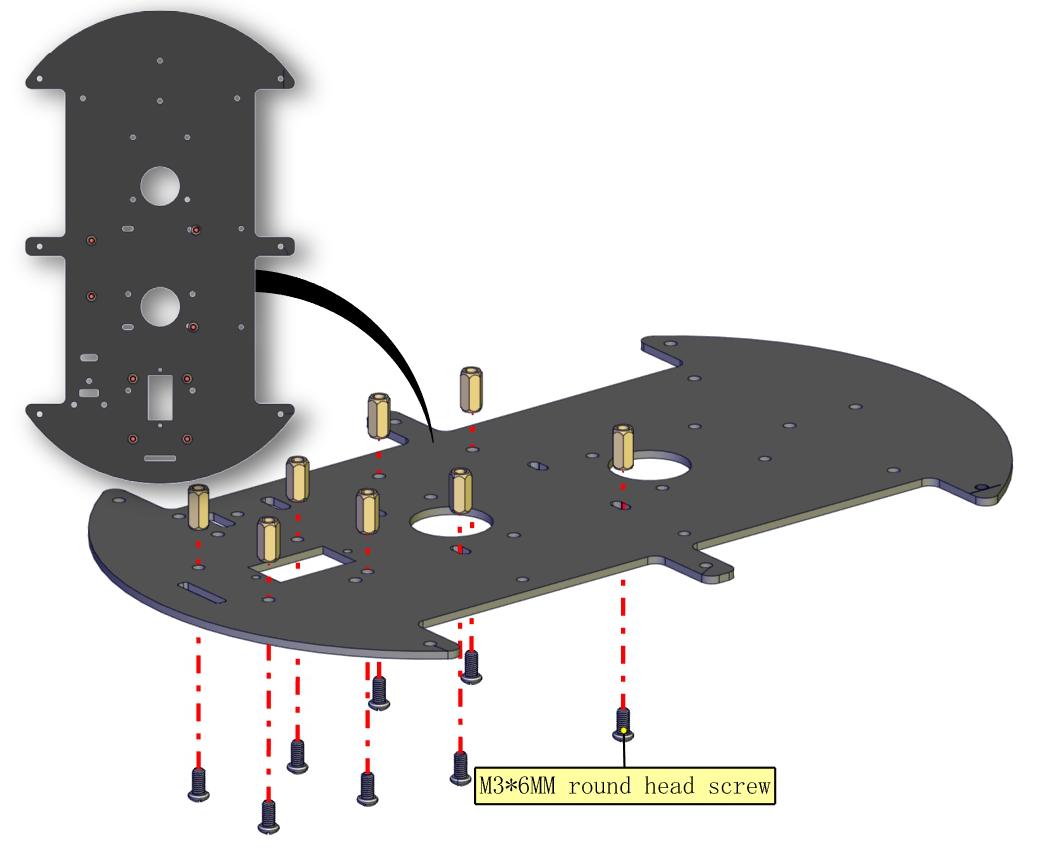
完成
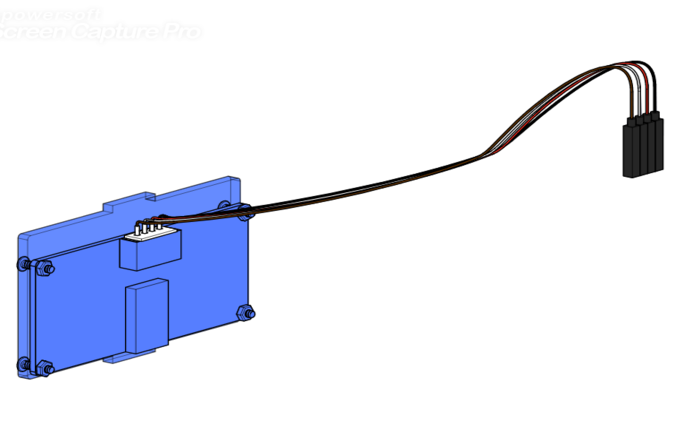
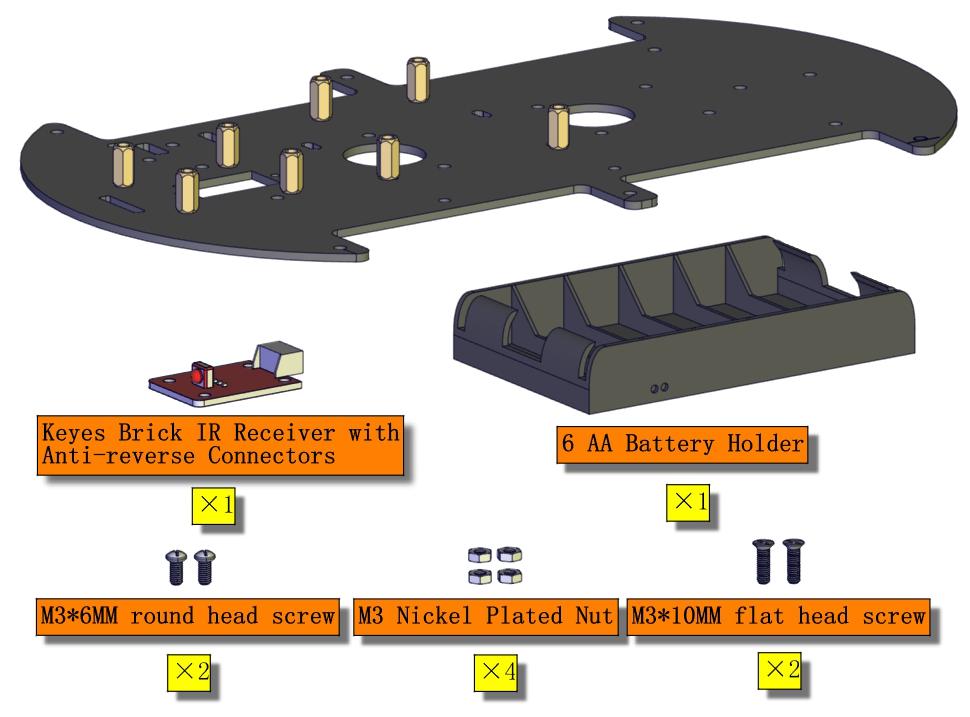
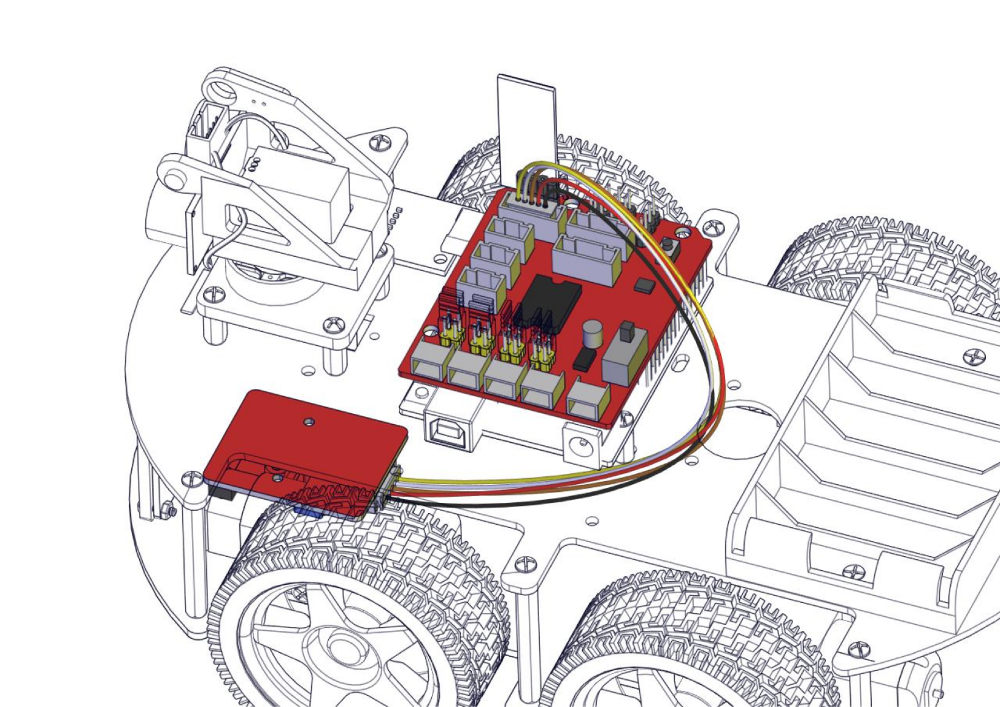
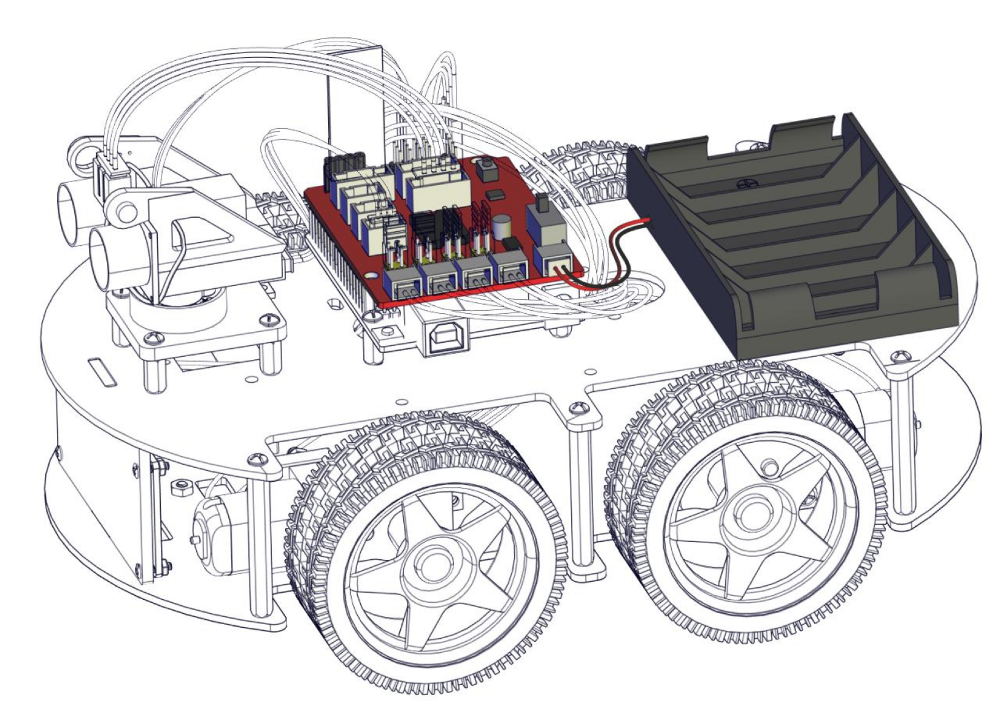
4.5 电池盒与红外接收安装#
安装所需零件
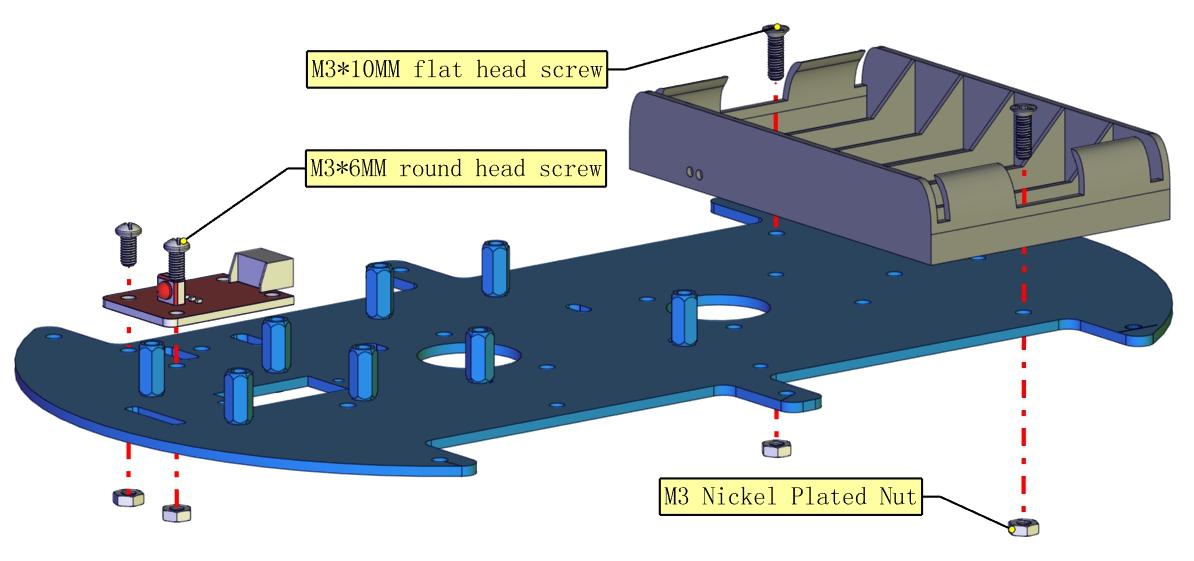
安装
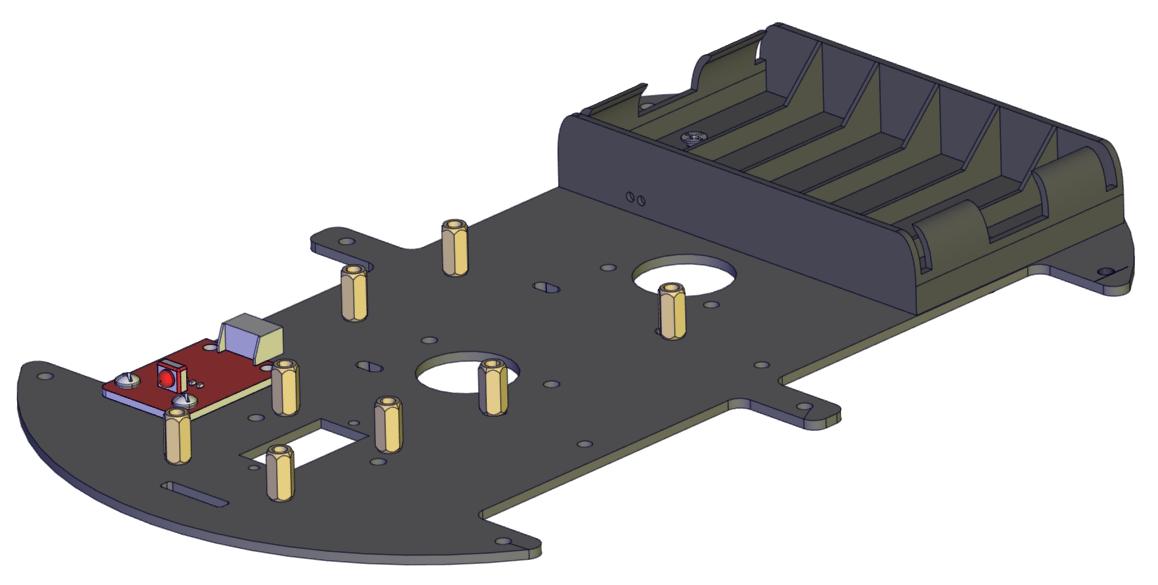
完成
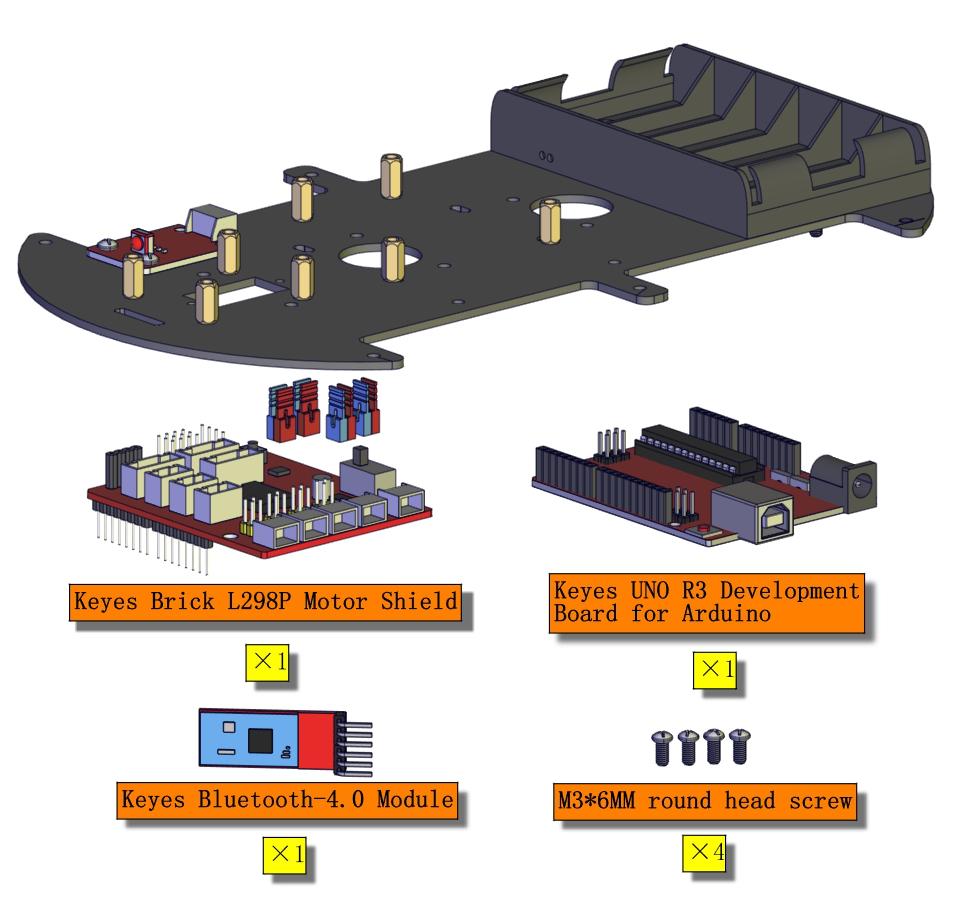
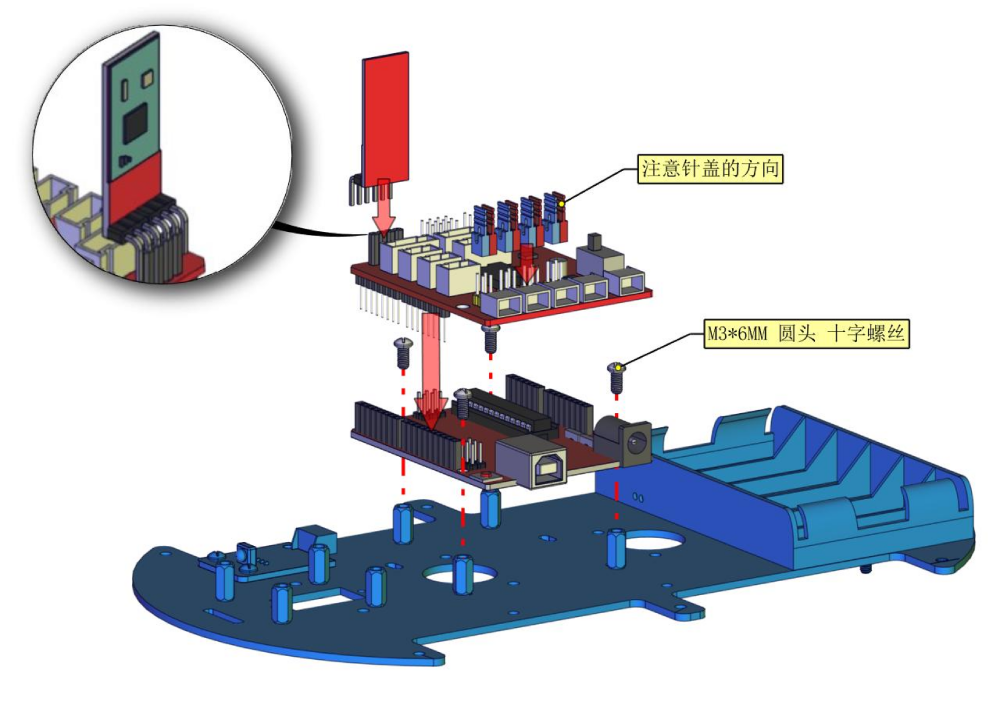
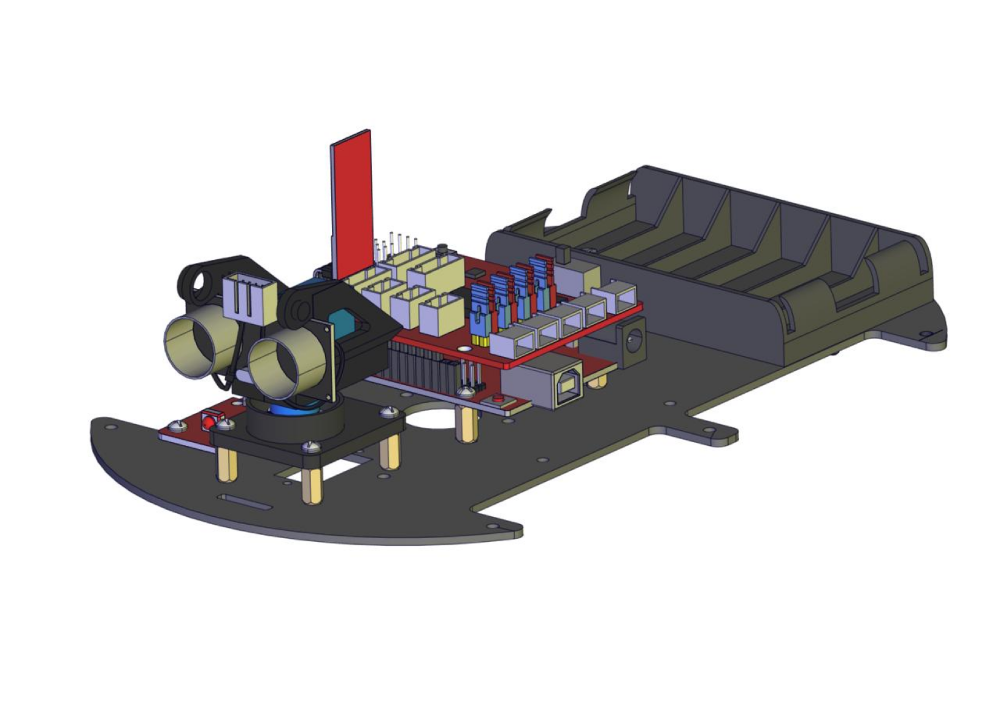
4.6 扩展板、UNO板与蓝牙安装#
安装所需零件
安装
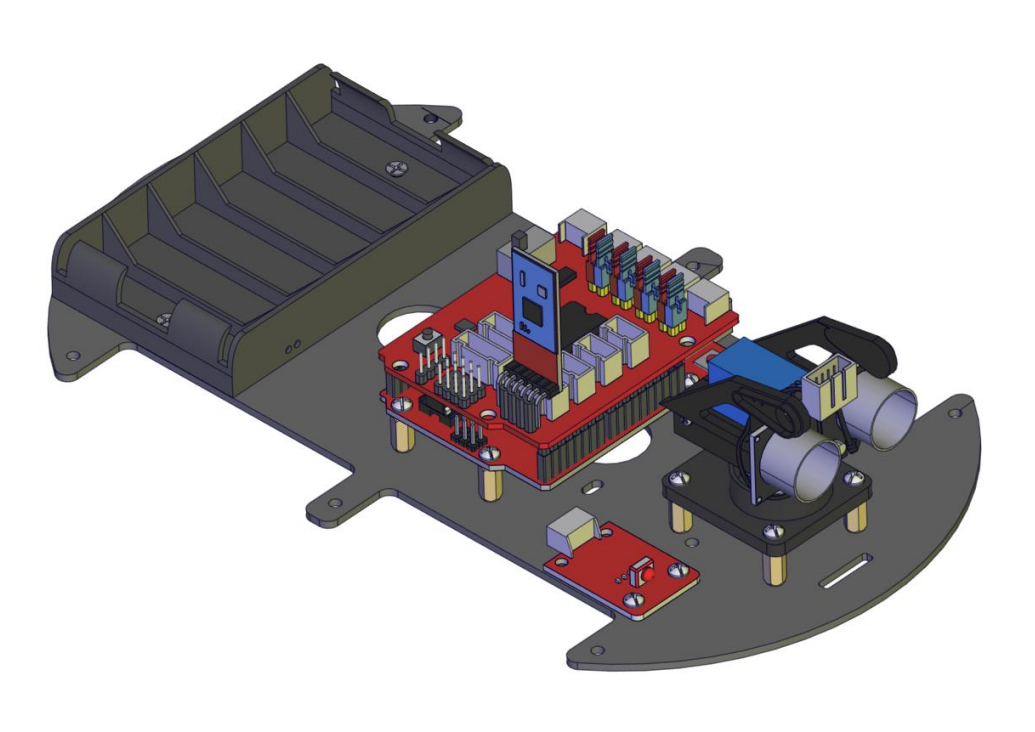
完成
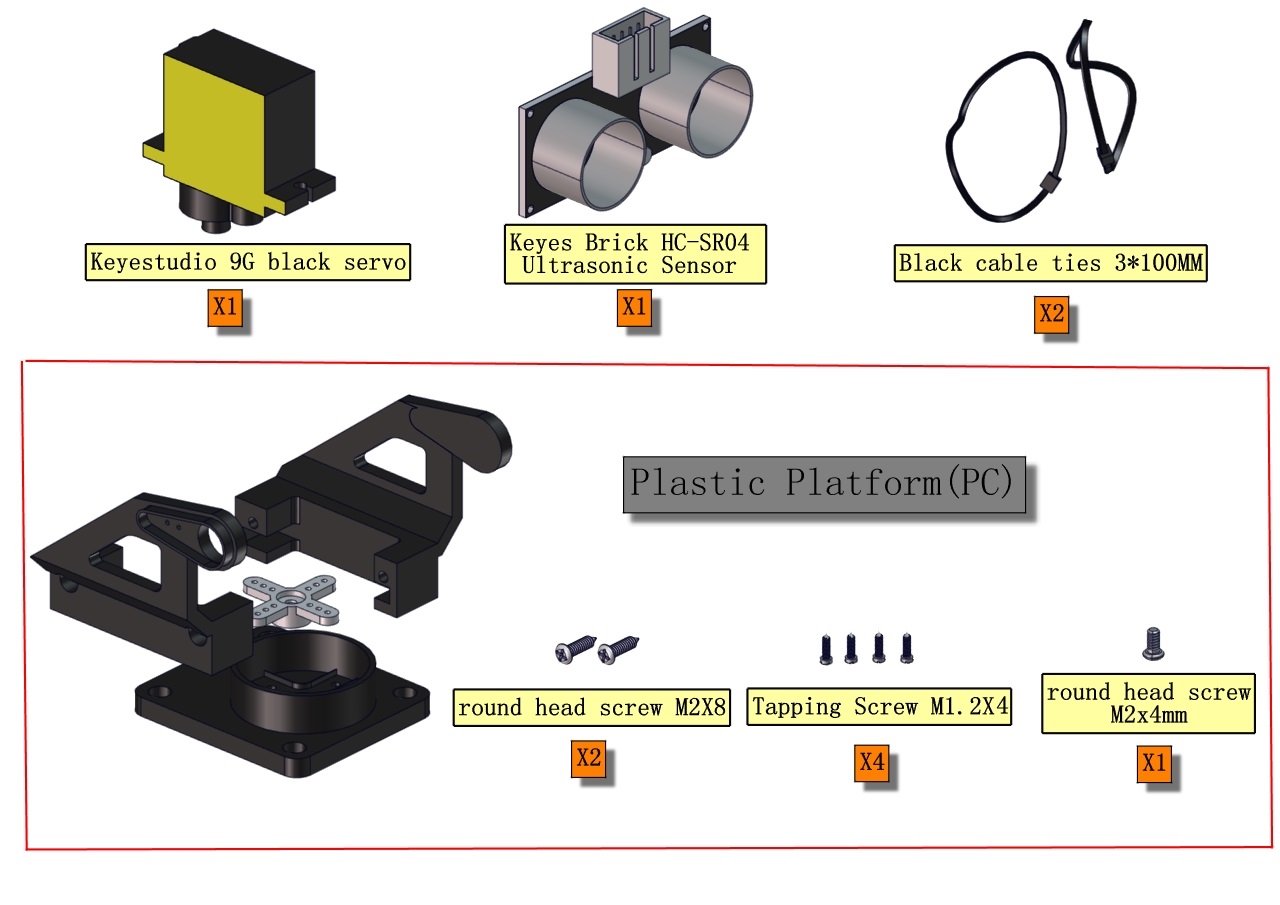
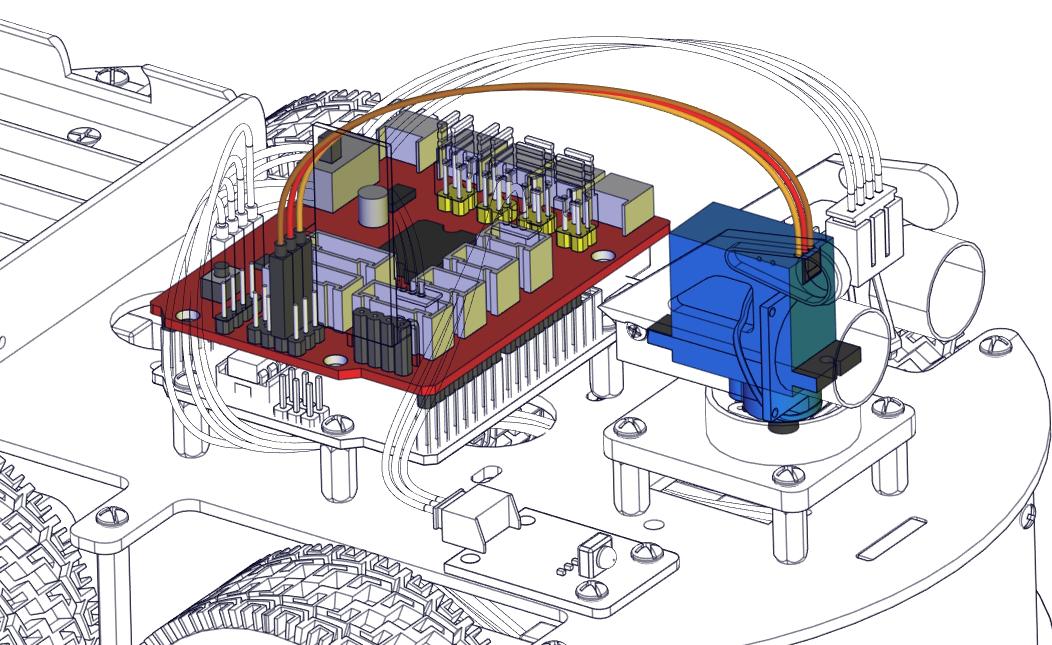
4.7 舵机安装#
安装所需零件
分步安装1
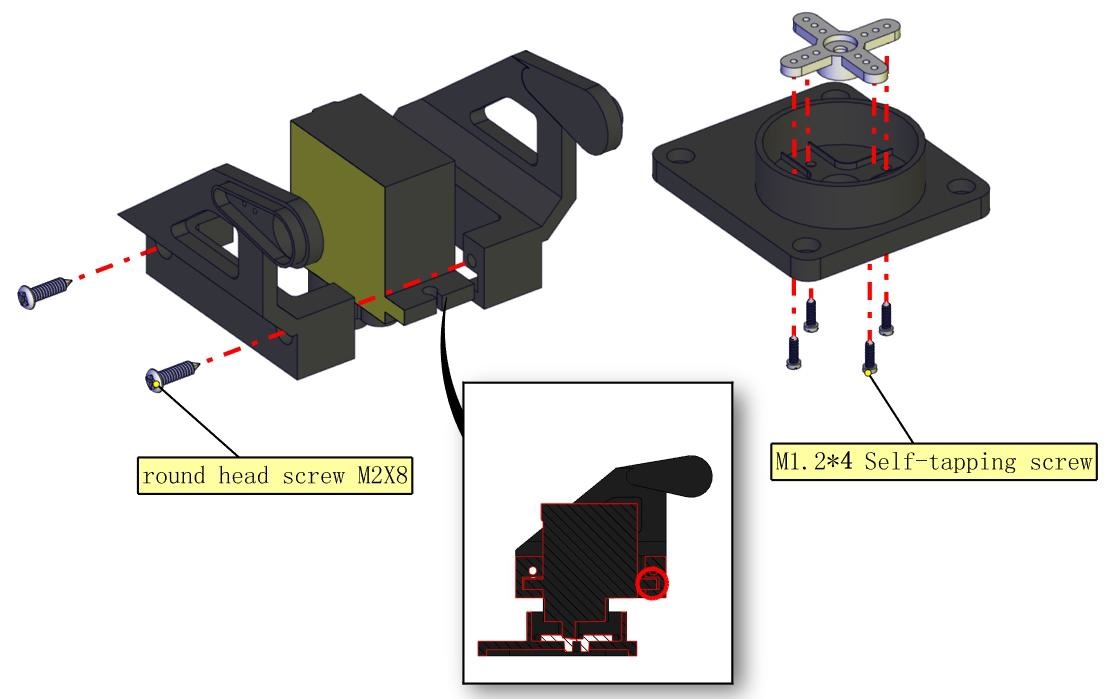
完成上述步骤后,必须要调整舵机角度到90度,才能继续以下步骤。
调整舵机代码如下:
#include <Servo.h> // 包含舵机库
Servo myservo; // 创建舵机对象
void setup() {
myservo.attach(); // 将舵机信号线连接到数字引脚9(可以根据实际连接修改)
myservo.write(90); // 设置舵机初始位置为90度
delay(1000); // 等待1秒让舵机有时间转动到指定位置
}
void loop() {
// 这里不需要做任何事情
}
分步安装2
完成
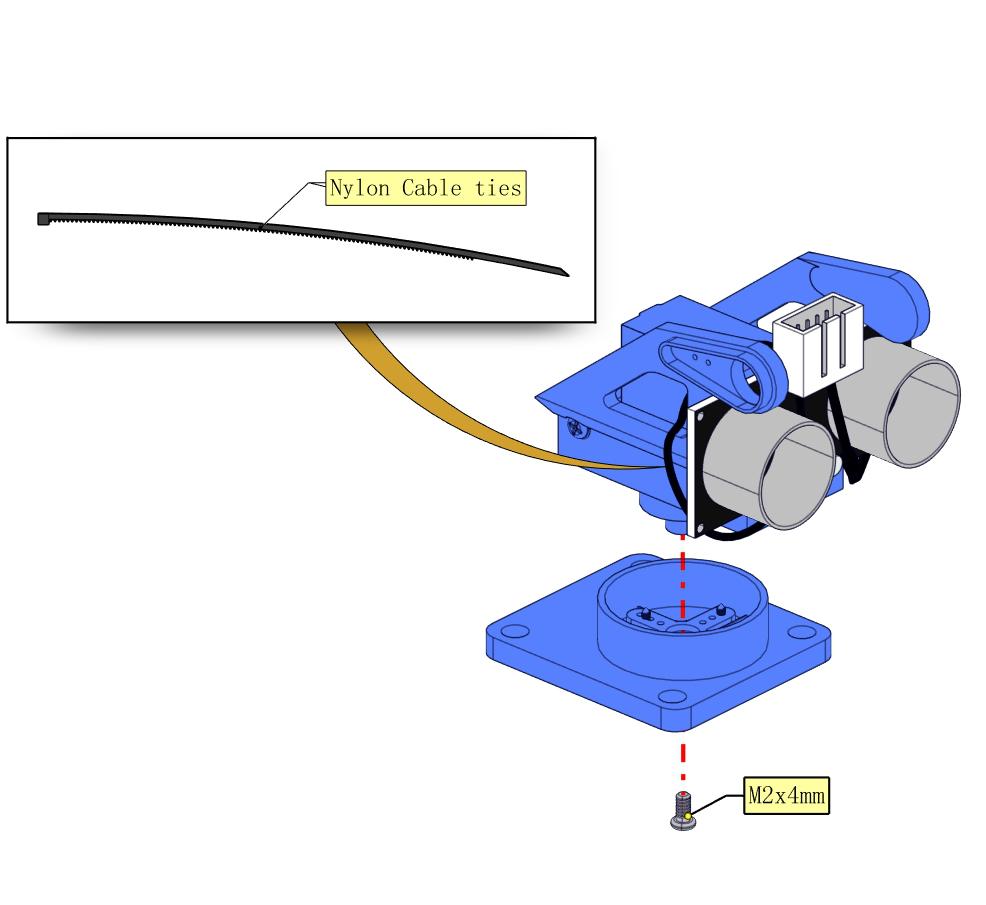
4.8 舵机固定#
安装所需零件
安装
完成
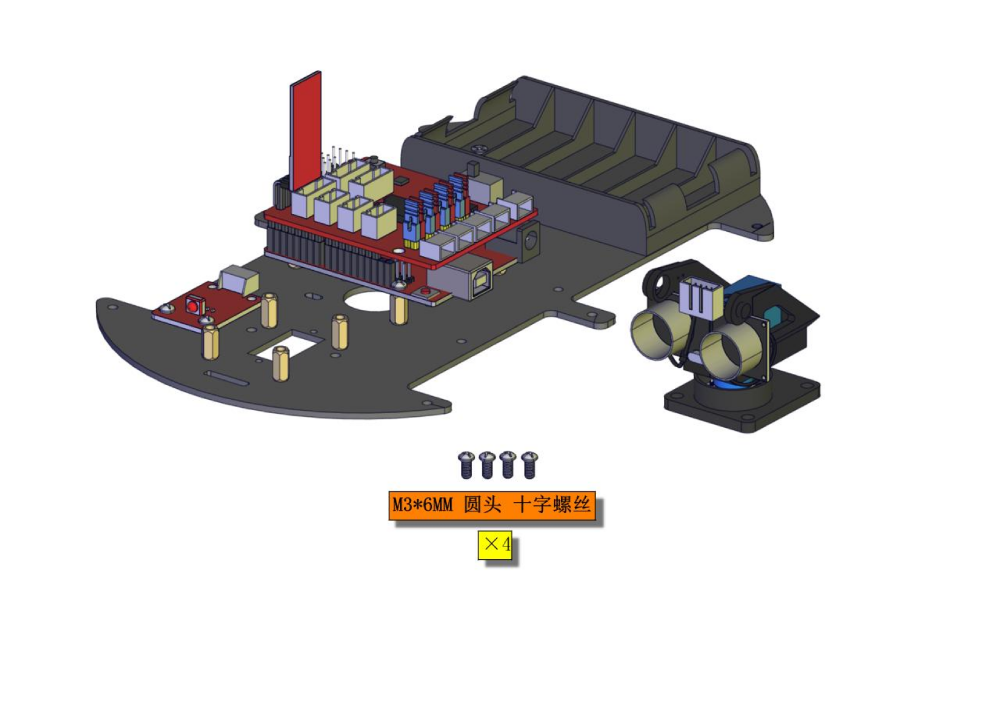
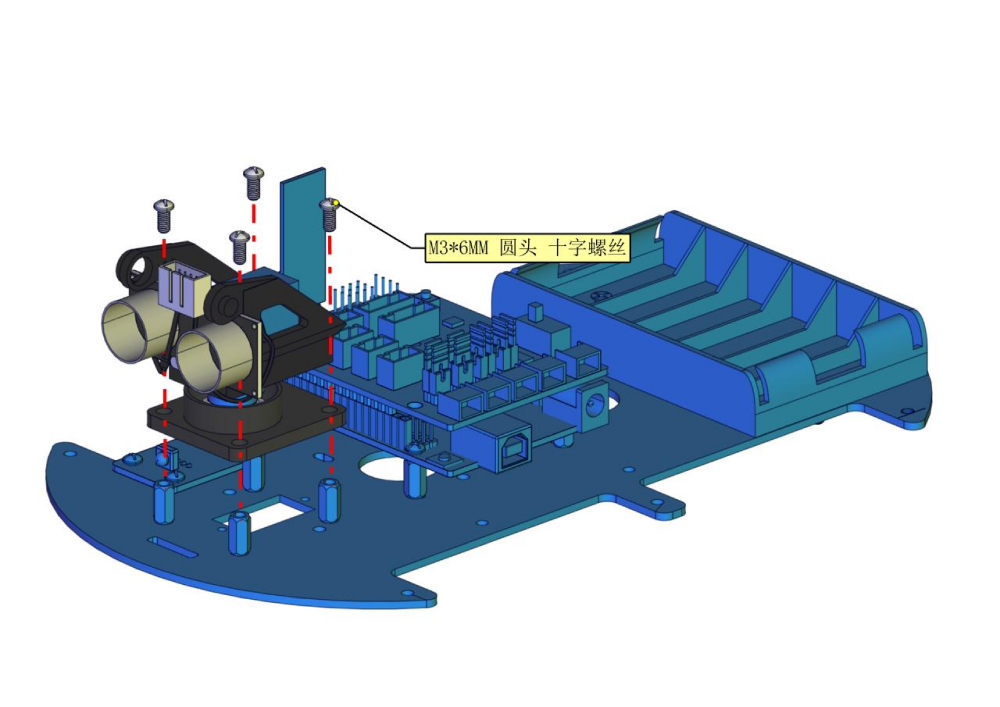
4.9 整车安装#
安装所需零件
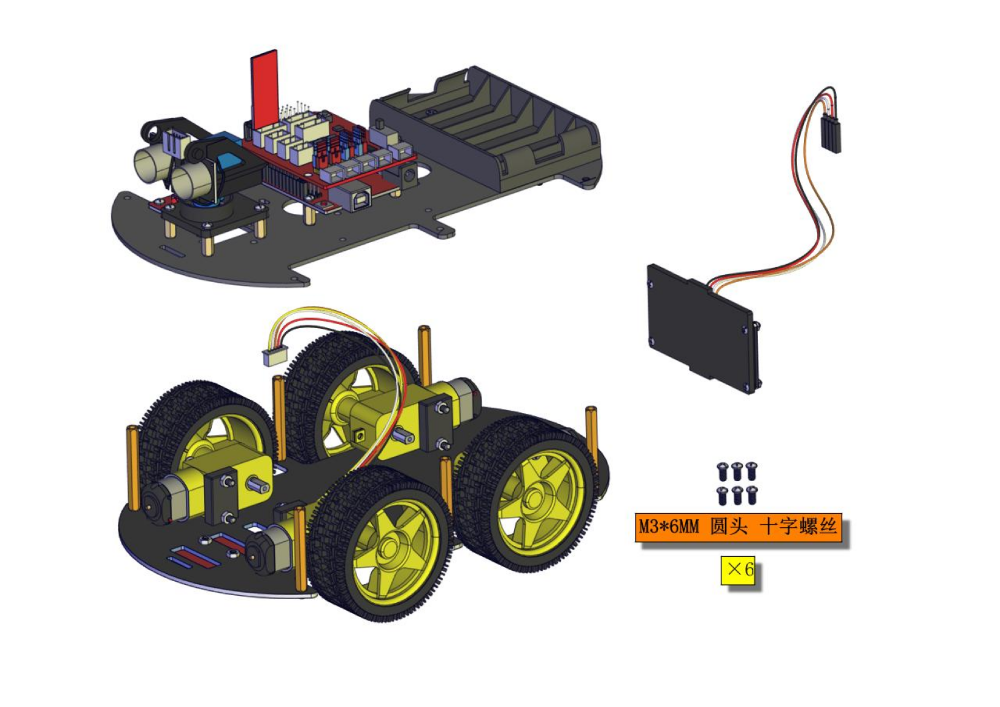
安装(安装前先穿线)
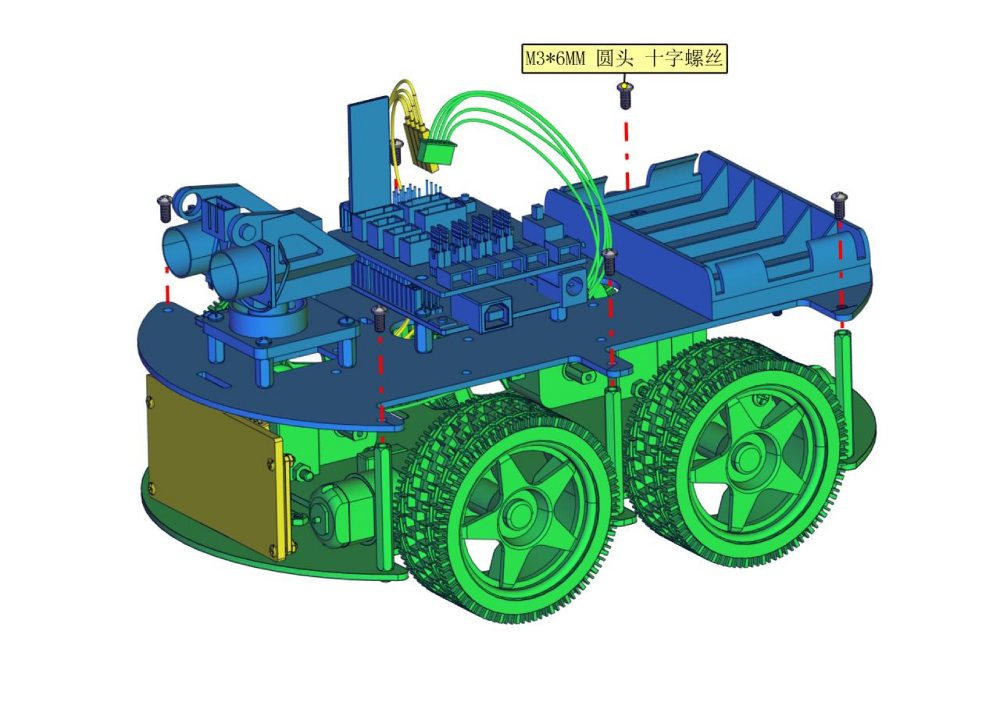
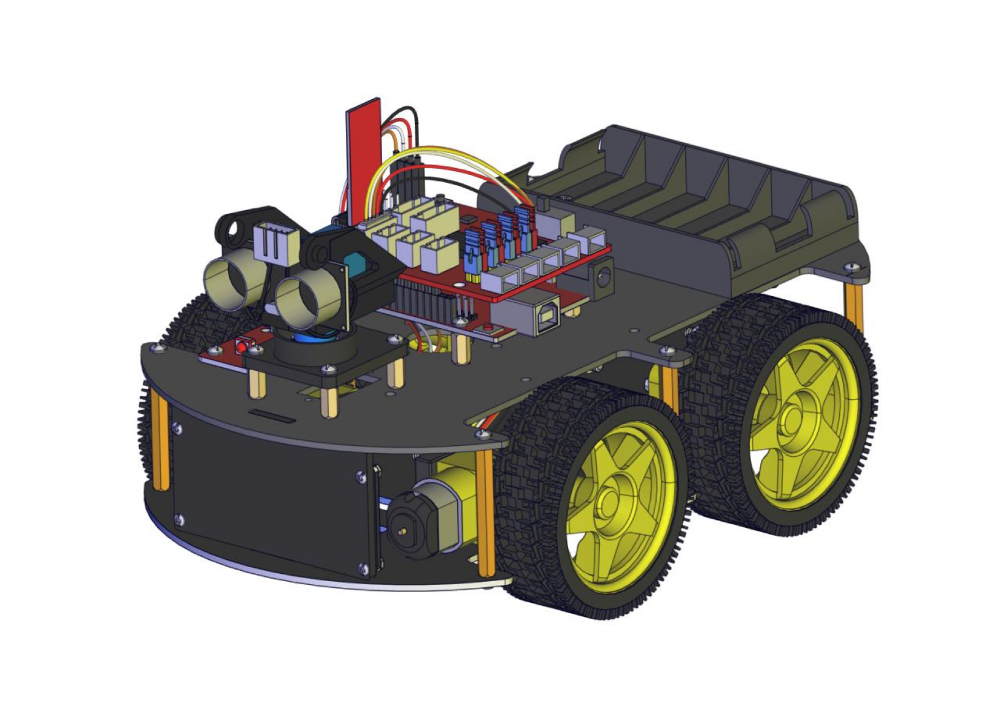
完成
4.10 线材连接#
LED屏接线图
循迹传感器接线图
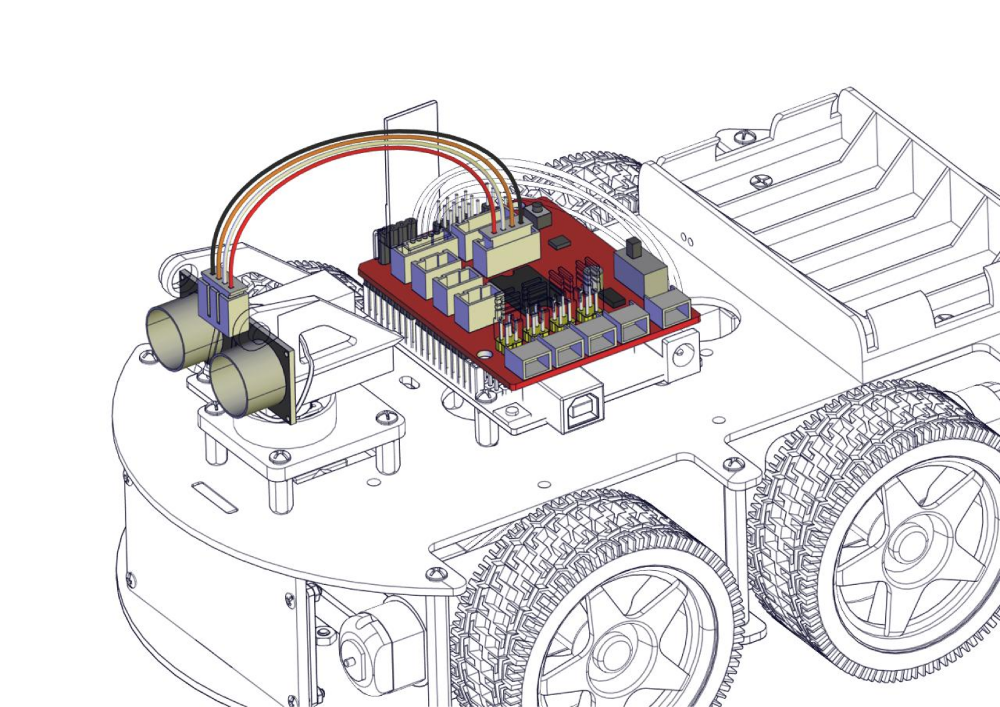
超声波接线图
舵机接线图
红外传感器接线图
M1位电机接线图
M2位电机接线图
M3位电机接线图
M4位电机接线图
电池盒接线图
完成渲染效果图