使用Arduino IDE开发#
1. Arduino简介#
Arduino是一款开源电子平台,专为DIY爱好者和学习者设计,使他们能够轻松创建互动电子项目。 从2005年发布以来,Arduino因其易用性和灵活性而受到广泛欢迎。Arduino的硬件包括多种型号的开发板,软件上则配备简单易用的Arduino IDE,使用户能够通过C/C++编程语言直接与硬件交互。Arduino平台支持各种传感器和执行器,适用于多个应用领域,包括自动化、机器人、艺术等。因此,它成为了教育、创客运动和原型开发的首选工具。
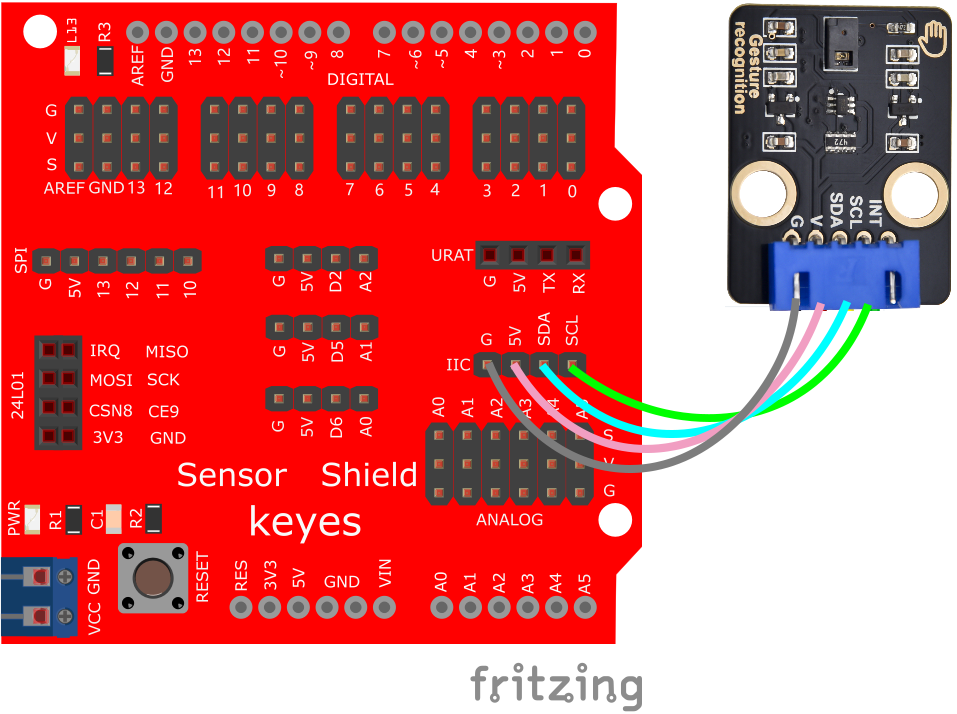
2. 接线图#
3. 导入库文件#
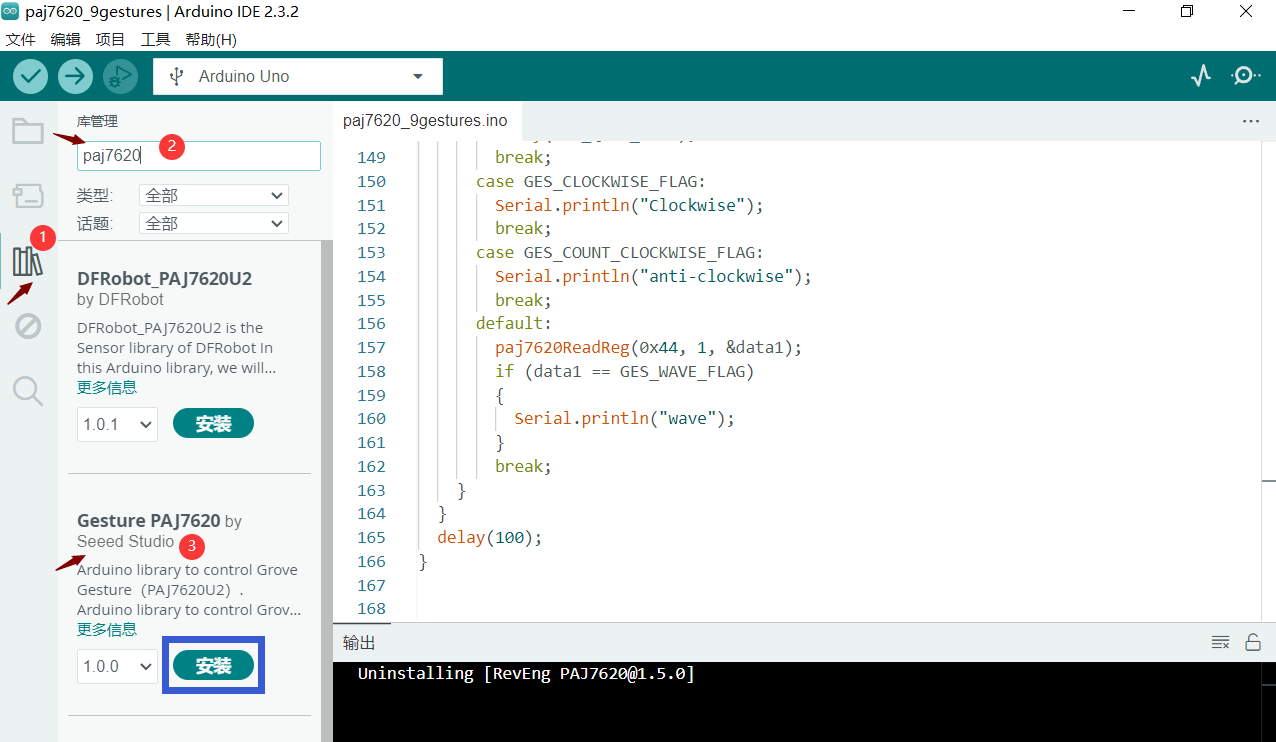
在Arduino编辑器中,通过“项目—导入库—管理库”找到并安装Paj7620库。
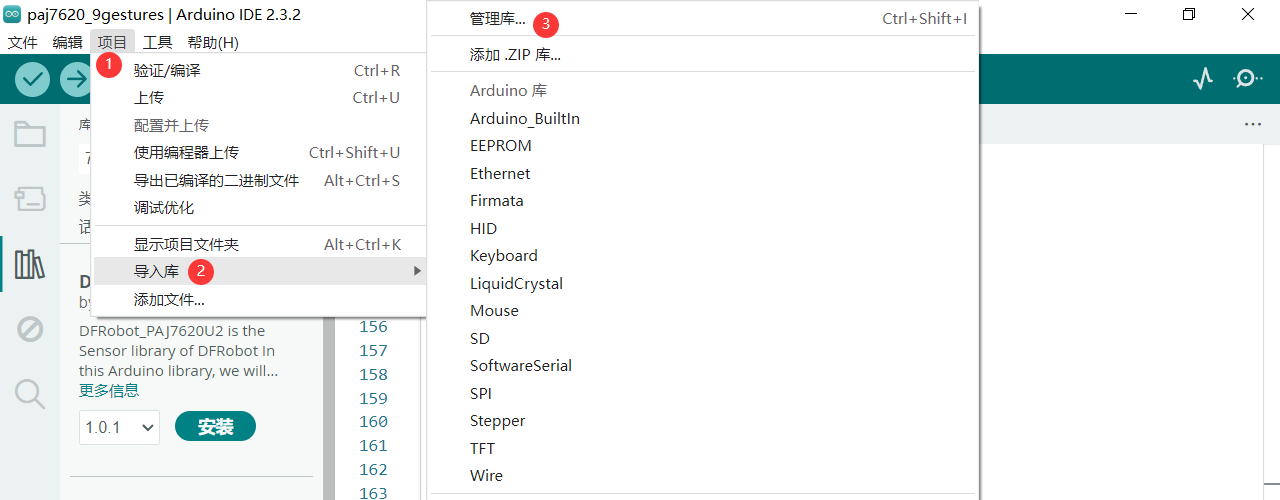
 点击安装
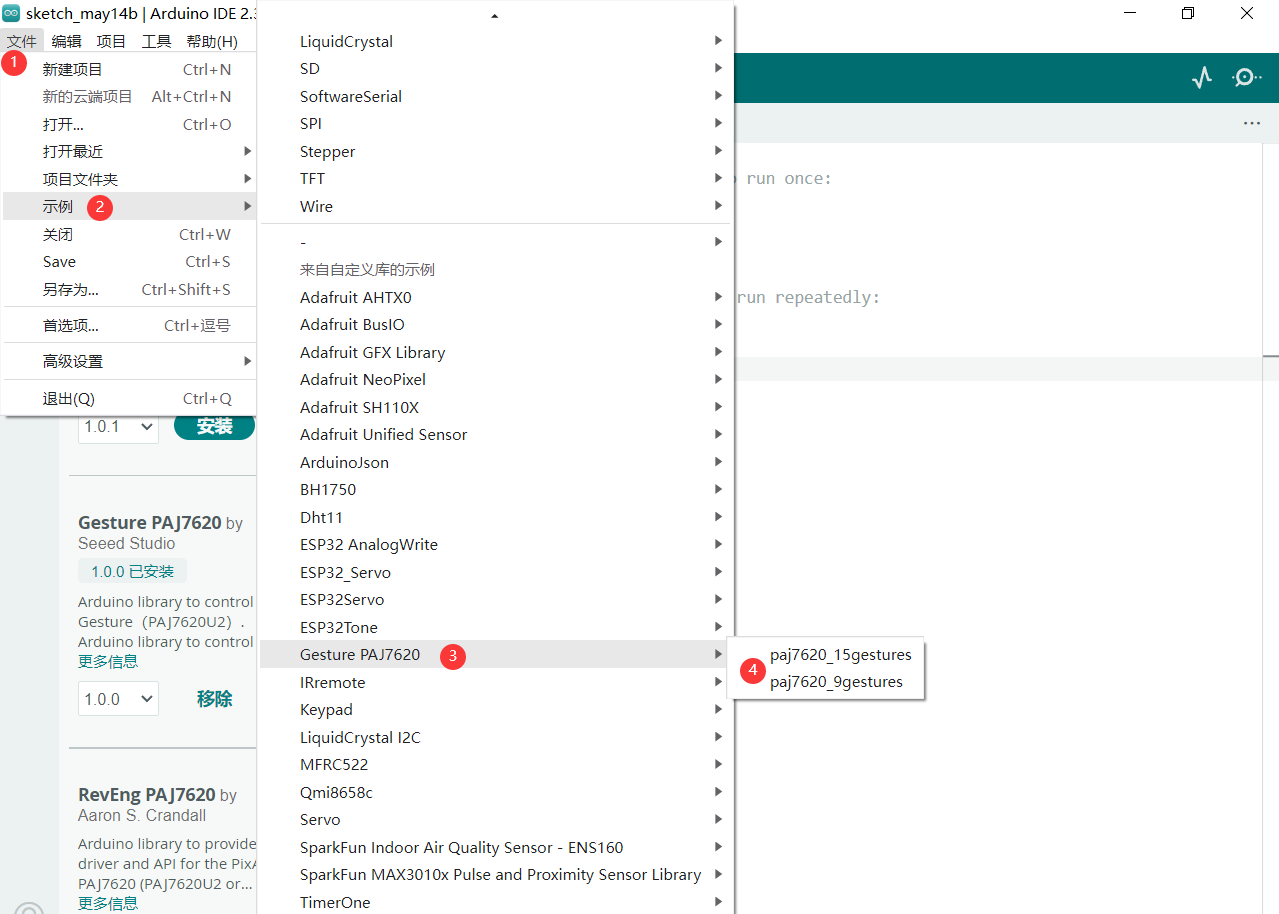
安装后,在示例中会找到“Gesture PAJ7620”示例。该库提供了两个示例脚本,分别用于检测9种和15种手势。需要注意的是,在手势测试时会有0.8秒的反应延迟。
点击安装
安装后,在示例中会找到“Gesture PAJ7620”示例。该库提供了两个示例脚本,分别用于检测9种和15种手势。需要注意的是,在手势测试时会有0.8秒的反应延迟。
4. 测试代码#
#include <Wire.h>
#include "paj7620.h"
/*
注意:当您想要识别前进/后退手势时,您的手势反应时间必须少于 GES_ENTRY_TIME(0.8 秒)。
您也可以根据实际情况调整反应时间。
*/
#define GES_REACTION_TIME 500 // 可调整反应时间,根据实际情况设置。
#define GES_ENTRY_TIME 800 // 当您想识别前进/后退手势时,手势反应时间必须少于 GES_ENTRY_TIME(0.8秒)。
#define GES_QUIT_TIME 1000 // 手势退出时间,设置为 1 秒。
void setup()
{
uint8_t error = 0;
Serial.begin(9600);
Serial.println("\nPAJ7620U2 测试演示:识别9个手势。");
error = paj7620Init(); // 初始化 Paj7620 寄存器
if (error)
{
Serial.print("初始化错误,代码:");
Serial.println(error);
}
else
{
Serial.println("初始化成功");
}
Serial.println("请输入您的手势:\n");
}
void loop()
{
uint8_t data = 0, data1 = 0, error;
error = paj7620ReadReg(0x43, 1, &data); // 从 Bank_0_Reg_0x43/0x44 读取手势结果。
if (!error)
{
switch (data)
{
case GES_RIGHT_FLAG: // 识别右手势
delay(GES_ENTRY_TIME);
paj7620ReadReg(0x43, 1, &data);
if(data == GES_FORWARD_FLAG)
{
Serial.println("前进");
delay(GES_QUIT_TIME);
}
else if(data == GES_BACKWARD_FLAG)
{
Serial.println("后退");
delay(GES_QUIT_TIME);
}
else
{
Serial.println("右");
}
break;
case GES_LEFT_FLAG: // 识别左手势
delay(GES_ENTRY_TIME);
paj7620ReadReg(0x43, 1, &data);
if(data == GES_FORWARD_FLAG)
{
Serial.println("前进");
delay(GES_QUIT_TIME);
}
else if(data == GES_BACKWARD_FLAG)
{
Serial.println("后退");
delay(GES_QUIT_TIME);
}
else
{
Serial.println("左");
}
break;
case GES_UP_FLAG: // 识别上手势
delay(GES_ENTRY_TIME);
paj7620ReadReg(0x43, 1, &data);
if(data == GES_FORWARD_FLAG)
{
Serial.println("前进");
delay(GES_QUIT_TIME);
}
else if(data == GES_BACKWARD_FLAG)
{
Serial.println("后退");
delay(GES_QUIT_TIME);
}
else
{
Serial.println("上");
}
break;
case GES_DOWN_FLAG: // 识别下手势
delay(GES_ENTRY_TIME);
paj7620ReadReg(0x43, 1, &data);
if(data == GES_FORWARD_FLAG)
{
Serial.println("前进");
delay(GES_QUIT_TIME);
}
else if(data == GES_BACKWARD_FLAG)
{
Serial.println("后退");
delay(GES_QUIT_TIME);
}
else
{
Serial.println("下");
}
break;
case GES_FORWARD_FLAG: // 识别前进手势
Serial.println("前进");
delay(GES_QUIT_TIME);
break;
case GES_BACKWARD_FLAG: // 识别后退手势
Serial.println("后退");
delay(GES_QUIT_TIME);
break;
case GES_CLOCKWISE_FLAG: // 识别顺时针手势
Serial.println("顺时针");
break;
case GES_COUNT_CLOCKWISE_FLAG: // 识别逆时针手势
Serial.println("逆时针");
break;
default:
paj7620ReadReg(0x44, 1, &data1);
if (data1 == GES_WAVE_FLAG) // 识别挥手手势
{
Serial.println("挥手");
}
break;
}
}
delay(100); // 等待 100 毫秒
}
4. 代码说明#
这段代码通过 Paj7620 传感器识别手势并输出相应的指令。这个传感器能够识别多种手势,包括上下左右、前进、后退等。
代码结构#
头文件引入
#include <Wire.h> #include "paj7620.h"
Wire.h: 这个库用于通过 I2C 总线与设备通信。paj7620.h: 这是 Paj7620 传感器的库,包含与该传感器的交互函数。
常量定义
#define GES_REACTION_TIME 500 // 可调整反应时间,根据实际情况设置。 #define GES_ENTRY_TIME 800 // 回应前进/后退手势的时间限制(0.8秒)。 #define GES_QUIT_TIME 1000 // 退出的时间(1秒)。
GES_REACTION_TIME: 手势识别的反应时间,可以根据需要调整。GES_ENTRY_TIME: 调整的时间限制,确保手势在此时间内得到响应。GES_QUIT_TIME: 识别后所需等待的时间。
初始化设置
void setup() { uint8_t error = 0; Serial.begin(9600); Serial.println("\nPAJ7620U2 测试演示:识别9个手势。"); error = paj7620Init(); // 初始化 Paj7620 寄存器 if (error) { Serial.print("初始化错误,代码:"); Serial.println(error); } else { Serial.println("初始化成功"); } Serial.println("请输入您的手势:\n"); }
setup()函数用于初始化代码运行时的设置。开启串口通信并设置波特率为9600。
调用
paj7620Init()函数来初始化传感器的寄存器。如果返回错误,则输出错误编码;否则,输出初始化成功的信息。
主循环
void loop() { uint8_t data = 0, data1 = 0, error; error = paj7620ReadReg(0x43, 1, &data); // 从 Bank_0_Reg_0x43/0x44 读取手势结果。 if (!error) { switch (data) { // 各种手势处理... } } delay(100); // 等待 100 毫秒 }
loop()函数是程序的主循环,会不断执行。读取传感器的手势数据(寄存器
0x43)并存储在变量data中。如果读取成功,不同的
case会根据返回的手势数据执行相应的动作。
手势识别和输出#
在主循环中,通过 switch 语句处理不同的手势识别。下面是一些手势及其相应的逻辑:
右手势
case GES_RIGHT_FLAG: delay(GES_ENTRY_TIME); paj7620ReadReg(0x43, 1, &data); if(data == GES_FORWARD_FLAG) { Serial.println("前进"); delay(GES_QUIT_TIME); } else if(data == GES_BACKWARD_FLAG) { Serial.println("后退"); delay(GES_QUIT_TIME); } else { Serial.println("右"); } break;
当检测到右手势后,程序会等待
GES_ENTRY_TIME毫秒,之后再次读取手势数据。如果是“前进”或“后退”的手势,则分别输出相应的信息,并在输出后再等待
GES_QUIT_TIME毫秒。如果检测到的手势不是“前进”或“后退”,则输出“右”。
其他手势
各个手势(左、上、下、前进、后退、顺时针、逆时针)使用类似的逻辑进行处理。
挥手手势
default: paj7620ReadReg(0x44, 1, &data1); if (data1 == GES_WAVE_FLAG) { Serial.println("挥手"); } break;
如果未检测到特定手势,程序会检查是否为挥手手势,并输出相关信息。
5. 测试结果#
按照接线图连接模块并烧录程序,上电后,打开串口监视器并设置波特率为9600,当在模块前方展示手势时,串口监视器将实时显示对应的手势识别结果,如“前进”、“后退”等。