Python#
1. MicroPython编程软件介绍#
MicroPython是一个旨在在微控制器和嵌入式系统上运行Python编程语言的实现。它设计用于运行在资源受限的设备上,并且提供了与硬件直接交互的简便方法。MicroPython不仅支持常见的Python功能,还提供了用于控制硬件的API,使得在单板计算机(如树莓派Pico)上的编程变得简单和直观。
MicroPython适合于教育、原型开发和物联网应用,帮助开发者和学生快速实现硬件控制和信号处理。
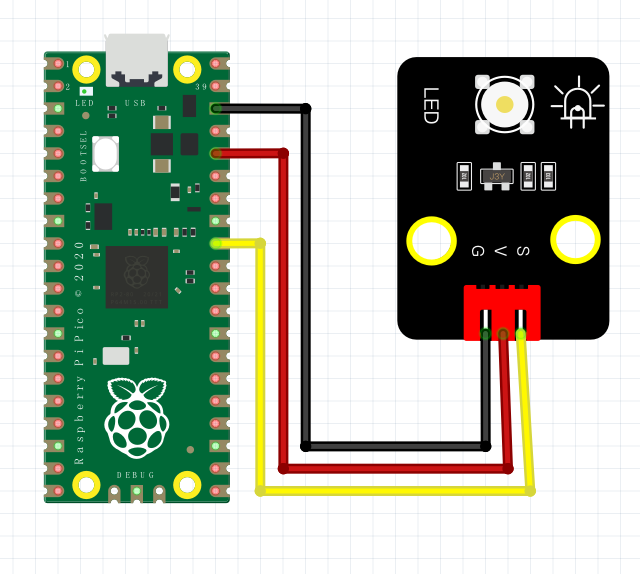
2. 连接图#
3. 测试代码#
import machine
import utime
led_onboard = machine.Pin(27, machine.Pin.OUT)
while True:
led_onboard.value(1)
utime.sleep(2)
led_onboard.value(0)
utime.sleep(2)
4. 代码介绍#
import machine
机器库包含MicroPython需要与Pico和其他MicroPython兼容的设备通信的所有指令,扩展了物理计算的语言。import utime
“utime”库处理所有与时间有关的事情,从测量时间到将延迟插入到程序中,单位为秒。led_onboard = machine.Pin(27, machine.Pin.OUT)
第一个参数27是您正在设置的引脚的编号;第二个参数machine.Pin.OUT指示Pico,该引脚应作为输出使用。utime.sleep(2)
这调用utime库中的sleep函数,暂停程序输入的秒数——在本例中为2秒。
5. 测试结果#
烧录好测试代码,按照接线图连接好线;上电后,LED模块上的LED闪烁,亮2秒,灭2秒,循环交替。
6. 加强训练(呼吸灯)#
本部分涉及到PWM(脉宽调制)控制方式:
代码示例:
import utime
from machine import Pin, PWM
PWM_PulseWidth = 0
# 使用树莓派Pico板上LED,构建PWM对象pwm_LED
pwm_LED = PWM(Pin(27))
# 设置pwm_LED频率
pwm_LED.freq(500)
while True:
while PWM_PulseWidth < 65535: # 循环条件为PWM_PulseWidth的值小于65535
PWM_PulseWidth += 50 # 每次循环都加50
utime.sleep_ms(1) # 延时1ms
pwm_LED.duty_u16(PWM_PulseWidth) # 给引脚赋值
while PWM_PulseWidth > 0: # 循环条件为PWM_PulseWidth的值大于0
PWM_PulseWidth -= 50 # 每次循环都减50
utime.sleep_ms(1) # 延时1ms
pwm_LED.duty_u16(PWM_PulseWidth) # 给引脚赋值
**结果:**上传代码后,LED会由暗变亮然后再由亮变到暗,这样我们便得到了一个呼吸灯。(如果没有实现这个功能,先检查LED的S端是否接在27脚)