2.3.4 语音播报倾斜#
2.3.4.1 简介#
使用小智语音模块语音控制读取UNO开发板连接的传感器的值,我们先使用一个简单语音控制读取的功能熟悉一下代码以及逻辑。以便后面的课程理解。
2.3.4.2 控制指令表#
接收到UNO开发板发送过来的消息号,语音模块便会播出设置好的语音。
消息号 |
播放语音 |
|---|---|
10 |
警告发生倾斜 |
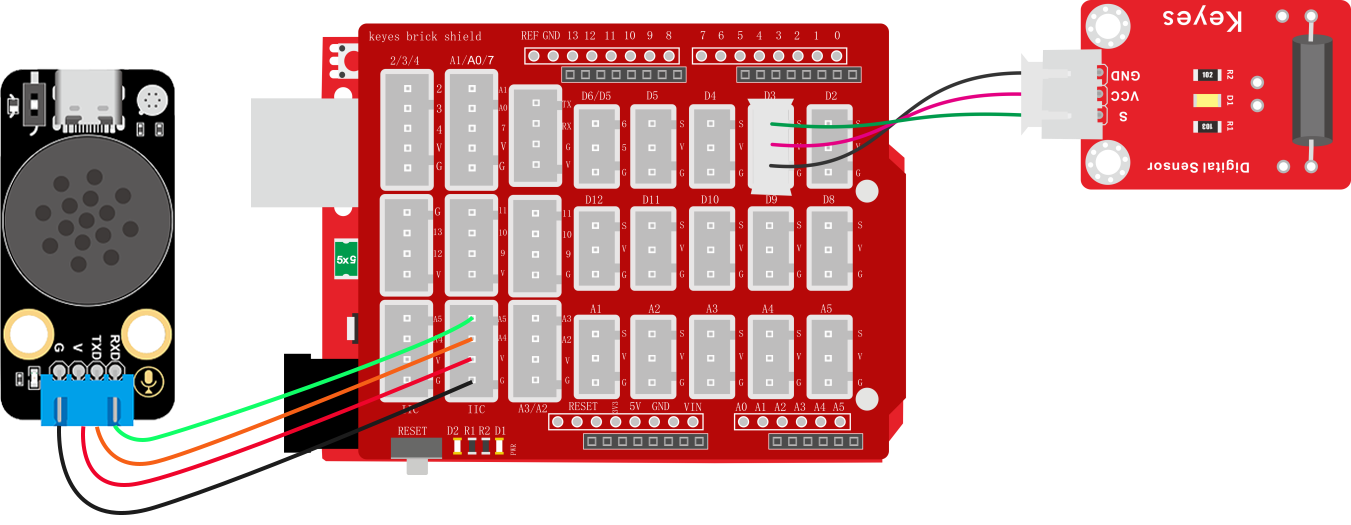
2.3.4.3 接线图#
2.3.4.4 代码#
// 引入SoftwareSerial库,用于创建软串口通信
#include <SoftwareSerial.h>
// 创建软串口对象,使用A5作为RX引脚接收数据,A4作为TX引脚发送数据
SoftwareSerial mySerial(A5, A4);
// 定义变量用于存储从语音模块接收到的控制码
volatile int Voice_Control = 0; // 初始化为0,确保首次判断时不触发任何指令
// 定义倾斜传感器连接的引脚号
int TiltPin = 3;
/*
函数功能:通过串口发送具有固定帧格式的数据包
数据包格式:帧头(0xAA 0x55) + 消息号数据 + 数据1 + 数据2 + 帧尾(0x55 0xAA)
输入参数说明:
---Message_Number :消息号,用于标识命令类型 <必需填写>
---data1 :第一个数据参数 <如果没有数据就输入0>
---data2 :第二个数据参数 <如果没有数据就输入0>
*/
void Uart_SendCmd(int Message_Number, int data1, int data2) {
// 发送帧头:固定字节0xAA和0x55,用于标识数据包的开始
mySerial.write(0XAA);
mySerial.write(0X55);
// 发送消息号,标识具体的命令类型
mySerial.write(Message_Number);
// 发送两个数据参数
mySerial.write(data1);
mySerial.write(data2);
// 发送帧尾:固定字节0x55和0xAA,用于标识数据包的结束
mySerial.write(0X55);
mySerial.write(0XAA);
}
void setup() {
// 初始化硬件串口,用于调试和监控,波特率9600
Serial.begin(9600);
// 初始化软串口,用于与语音模块通信,波特率9600
mySerial.begin(9600);
// 将引脚设置为输入模式,用于检测外部信号
pinMode(TiltPin, INPUT);
}
void loop() {
//读取倾斜传感器的状态并赋值给变量
int TiltValue = digitalRead(TiltPin);
// 持续检查软串口是否有来自语音模块的数据
while (mySerial.available()) {
// 读取一个字节的数据
Voice_Control = mySerial.read();
// 将接收到的数据通过硬件串口输出,便于调试和监控
Serial.println(Voice_Control);
}
//通过变量判断倾斜传感器的状态,等于0倾斜,等于1正常
if (TiltValue == 0) {
// 变量等于0时,通过软串口发送一个命令数据包
// 消息号为10,两个数据参数都为0
Uart_SendCmd(10, 0, 0);
}
}
2.3.4.5 代码说明#
① 导入模拟串口库文件;创建模拟串口对象并设置模拟串口引脚为:RX:A5,TX:A4 ;定义读取倾斜传感器状态的引脚为D3 ;创建一个int类型变量名称为Voice_Control用于存放语音模块发送过来的控制指令
// 引入SoftwareSerial库,用于创建软串口
#include <SoftwareSerial.h>
// 创建软串口对象:RX引脚为A5,TX引脚为A4
// 用于连接语音识别模块
SoftwareSerial mySerial(A5, A4);
// 定义倾斜传感器连接的引脚号
int TiltPin = 3;
// 定义变量用于存储从语音模块接收到的控制码
volatile int Voice_Control = 0; // 初始化为0,确保首次判断时不触发任何指令
② 创建发送消息号到语音模块的函数,函数名称为“Uart_SendCmd” ; 为函数添加输入参数,第一个参数为整数类型名称为Message_Number(是用来存放需要发送消息号的),第二个参数为整数类型名称为data1(是用来存放需要发送的数据的),第三个参数为整数类型名称为data2(也是用来存放需要发送的数据的,与dsta1不同的是,如果消息号对应一个数据那就data2为0即可,如果对应两个数据就启用data2,如时钟需要数据时,数据分的时候就要用到两个数据位)
/*
函数功能:通过串口发送具有固定帧格式的数据包
数据包格式:帧头(0xAA 0x55) + 消息号数据 + 数据1 + 数据2 + 帧尾(0x55 0xAA)
输入参数说明:
---Message_Number :消息号,用于标识命令类型 <必需填写>
---data1 :第一个数据参数 <如果没有数据就输入0>
---data2 :第二个数据参数 <如果没有数据就输入0>
*/
void Uart_SendCmd(int Message_Number, int data1, int data2) {
// 发送帧头:固定字节0xAA和0x55,用于标识数据包的开始
mySerial.write(0XAA);
mySerial.write(0X55);
// 发送消息号,标识具体的命令类型
mySerial.write(Message_Number);
// 发送两个数据参数
mySerial.write(data1);
mySerial.write(data2);
// 发送帧尾:固定字节0x55和0xAA,用于标识数据包的结束
mySerial.write(0X55);
mySerial.write(0XAA);
}
③ 设置串口波特率为9600 ; 设置模拟串口波特率为9600 ;将读取倾斜传感器状态的引脚设置为输出模式
// 初始化硬件串口,用于调试和监控,波特率9600
Serial.begin(9600);
// 初始化软串口,用于与语音模块通信,波特率9600
mySerial.begin(9600);
// 将引脚设置为输入模式,用于检测外部信号
pinMode(TiltPin, INPUT);
④ 添加一个int类型变量设置变量名称为TiltValue并将读取到的倾斜传感器的值赋值给这个变量;使用if判断模拟串口中是否有数据发送过来 ;如果有数据发送过来就读取数据并将数据赋值给变量Voice_Control ;使用串口换行打印变量Voice_Control的值(只能使用串口打印模拟串口不行)方便观察接收到的指令值
//读取倾斜传感器的状态并赋值给变量
int TiltValue = digitalRead(TiltPin);
// 持续检查软串口是否有来自语音模块的数据
while (mySerial.available()) {
// 读取一个字节的数据
Voice_Control = mySerial.read();
// 将接收到的数据通过硬件串口输出,便于调试和监控
Serial.println(Voice_Control);
}
⑤ 使用if语句对变量TiltValue的值进行判断如果等于0,就发送消息号让语音模块播报倾斜警告的语音,播报倾斜警告语音的消息号为10
//通过变量判断倾斜传感器的状态,等于0倾斜,等于1正常
if (TiltValue == 0) {
// 变量等于0时,通过软串口发送一个命令数据包
// 消息号为10,两个数据参数都为0
Uart_SendCmd(10, 0, 0);
}
2.3.4.6 代码结果#
上传代码成功后,将倾斜模块向一遍倾斜如果倾斜传感器返回的数字信号为0,则语音模块就回发出"警告,发生倾斜"