4.4.10 水位监测系统#
请注意,使用设备时不要让水从水池和土壤池中溢出。如果水洒到其他传感器上,会导致短路,影响设备正常工作。另外,如果水洒到电池上,会导致发热和爆炸等危险。因此,请在使用设备时格外小心,尤其是幼儿使用时一定要在家长的监护下进行。为确保设备的安全运行,请遵循相关使用指南和安全规范。
4.4.10.1 简介#
本课程介绍如何使用ESP32开发板、水位传感器、智能语音模块、无源蜂鸣器、继电器、水泵和LCD1602显示屏,构建一个智能水源水位自动监测报警系统。其主要功能是监测水位变化,同时通过智能语音模块发出类似于“当前水位是多少” 等命令词时,语音播报水位多少,这样可以及时发现问题并采取措施避免灾害发生。该系统广泛应用于水利工程、城市排水、环境监测等领域。
水位自动监测报警系统,主要功能是监测水位变化,及时发现问题并采取措施避免灾害发生。该系统广泛应用于水利工程、城市排水、环境监测等领域。
4.4.10.2 接线图#
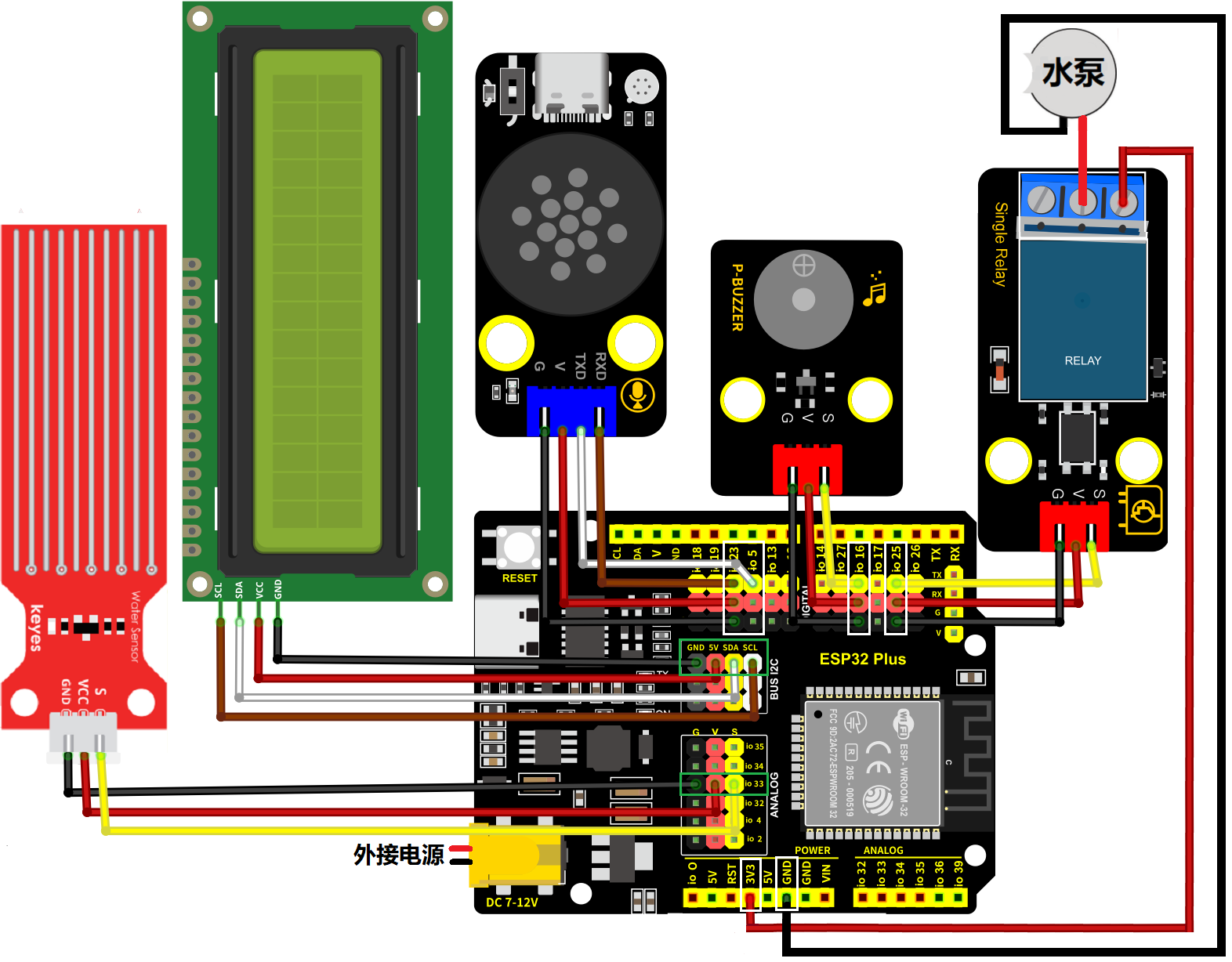
水位传感器的S引脚连接到io33
无源蜂鸣器的S引脚连接到io16
智能语音模块的TXD引脚连接到io5,RXD引脚连接到io23
LCD1602模块连接到 BUS I2C(SDA连接(SDA:IO21)、SCL连接(SCL:IO22)
继电器模块的S引脚连接到io25;继电器的NO端,连接到ESP32主板上的3V3引脚
水泵:
红色线连接到继电器的COM端,如图所示
黑色线连接到ESP32主板上的GND引脚,如图所示
⚠️ 特别注意:智慧农场已经组装好了,这里不需要把水位传感器、无源蜂鸣器、LCD1602模块、继电器、水泵和智能语音模块拆下来又重新组装和接线,这里再次提供接线图,是为了方便您编写代码!
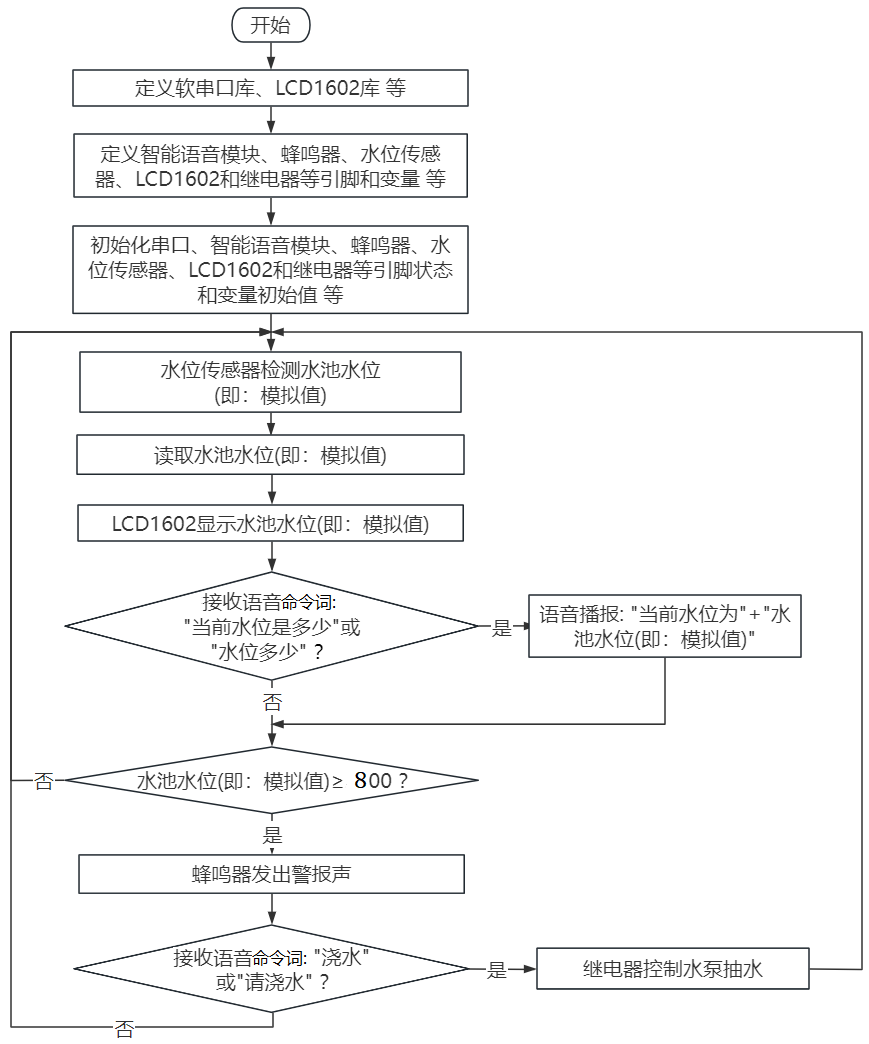
4.4.10.3 代码流程图#
4.4.10.4 实验代码#
代码文件在Arduino_代码文件夹中,代码文件为4_4_10_Water-Level-Testing-System,如下图所示:

鼠标双击4_4_10_Water-Level-Testing-System.ino即可在Arduino IDE中打开。
⚠️ 注意:代码中的条件阈值可以根据实际情况自行设置。
/*
* 文件名 : Water-Level-Testing-System
* 功能 : 结合水位传感器,语音控制模块、LCD1602、继电器、水泵和无源蜂鸣器模拟水位监测系统
* 编译IDE:ARDUINO 2.3.6
* 作者 : https://www.keyesrobot.cn/
*/
// 导入库文件
#include <SoftwareSerial.h>
#include <Wire.h>
#include <LiquidCrystal_I2C.h>
// 定义引脚常量
const int RX_PIN = 23; // 引脚 GPIO23 为 RX
const int TX_PIN = 5; // 引脚 GPIO5 为 TX
const int BuzzerPin = 16; // 定义无源蜂鸣器引脚
const int WaterLevelPin = 33; // 定义水位传感器的引脚
const int RelayPin = 25; // 定义继电器引脚
LiquidCrystal_I2C lcd(0x27,16,2); // 定义LCD地址和行列
SoftwareSerial mySerial(RX_PIN, TX_PIN); // 定义软件串口引脚(RX, TX)
// 定义变量
volatile int Waterlevel;
volatile int yuyin;
// 串口发送消息最大长度
#define UART_SEND_MAX 32
#define UART_MSG_HEAD_LEN 2
#define UART_MSG_FOOT_LEN 2
// 串口发送消息号
#define U_MSG_bozhensgshu 1
#define U_MSG_boxiaoshu 2
#define U_MSG_bobao1 3
#define U_MSG_bobao2 4
#define U_MSG_bobao3 5
#define U_MSG_bobao4 6
#define U_MSG_bobao5 7
#define U_MSG_bobao6 8
#define U_MSG_bobao7 9
#define U_MSG_bobao8 10
#define U_MSG_bobao9 11
#define U_MSG_bobao10 12
#define U_MSG_bobao11 13
#define U_MSG_bobao12 14
#define U_MSG_bobao13 15
#define U_MSG_bobao14 16
#define U_MSG_bobao15 17
#define U_MSG_bobao16 18
#define U_MSG_bobao17 19
#define U_MSG_bobao18 20
// 串口消息参数类型
typedef union {
double d_double;
int d_int;
unsigned char d_ucs[8];
char d_char;
unsigned char d_uchar;
unsigned long d_long;
short d_short;
float d_float;}uart_param_t;
// 串口发送函数实现
void _uart_send_impl(unsigned char* buff, int len) {
// TODO: 调用项目实际的串口发送函数
for(int i=0;i<len;i++){
mySerial.write (*buff++);
}
}
// 串口通信消息尾
const unsigned char g_uart_send_foot[] = {
0x55, 0xaa
};
// 十六位整数转32位整数
void _int16_to_int32(uart_param_t* param) {
if (sizeof(int) >= 4)
return;
unsigned long value = param->d_long;
unsigned long sign = (value >> 15) & 1;
unsigned long v = value;
if (sign)
v = 0xFFFF0000 | value;
uart_param_t p; p.d_long = v;
param->d_ucs[0] = p.d_ucs[0];
param->d_ucs[1] = p.d_ucs[1];
param->d_ucs[2] = p.d_ucs[2];
param->d_ucs[3] = p.d_ucs[3];
}
// 浮点数转双精度
void _float_to_double(uart_param_t* param) {
if (sizeof(int) >= 4)
return;
unsigned long value = param->d_long;
unsigned long sign = value >> 31;
unsigned long M = value & 0x007FFFFF;
unsigned long e = ((value >> 23 ) & 0xFF) - 127 + 1023;
uart_param_t p0, p1;
p1.d_long = ((sign & 1) << 31) | ((e & 0x7FF) << 20) | (M >> 3);
param->d_ucs[0] = p0.d_ucs[0];
param->d_ucs[1] = p0.d_ucs[1];
param->d_ucs[2] = p0.d_ucs[2];
param->d_ucs[3] = p0.d_ucs[3];
param->d_ucs[4] = p1.d_ucs[0];
param->d_ucs[5] = p1.d_ucs[1];
param->d_ucs[6] = p1.d_ucs[2];
param->d_ucs[7] = p1.d_ucs[3];
}
// 串口通信消息头
const unsigned char g_uart_send_head[] = {
0xaa, 0x55
};
// 播报函数7
void _uart_bobao7() {
uart_param_t param;
int i = 0;
unsigned char buff[UART_SEND_MAX] = {0};
for (i = 0; i < UART_MSG_HEAD_LEN; i++) {
buff[i + 0] = g_uart_send_head[i];
}
buff[2] = U_MSG_bobao7;
for (i = 0; i < UART_MSG_FOOT_LEN; i++) {
buff[i + 3] = g_uart_send_foot[i];
}
_uart_send_impl(buff, 5);
}
// 播报整数
void _uart_bozhensgshu(int zhengshu) {
uart_param_t param;
int i = 0;
unsigned char buff[UART_SEND_MAX] = {0};
for (i = 0; i < UART_MSG_HEAD_LEN; i++) {
buff[i + 0] = g_uart_send_head[i];
}
buff[2] = U_MSG_bozhensgshu;
param.d_int = zhengshu;
_int16_to_int32(¶m);
buff[3] = param.d_ucs[0];
buff[4] = param.d_ucs[1];
buff[5] = 0;
buff[6] = 0;
for (i = 0; i < UART_MSG_FOOT_LEN; i++) {
buff[i + 7] = g_uart_send_foot[i];
}
_uart_send_impl(buff, 9);
}
void setup(){
Serial.begin(9600); // 硬件串口(与电脑通信)
mySerial.begin(9600); // 软件串口(与外设通信)
pinMode(BuzzerPin,OUTPUT); // 设置无源蜂鸣器引脚为输出模式
pinMode(WaterLevelPin,INPUT); // 设置水位传感器引脚输入模式
pinMode(RelayPin,OUTPUT); // 设置继电器引脚为输出模式
Wire.begin(21,22); // 打开LCD通信引脚
Waterlevel = 0; // 定义变量Waterlevel初始值为0
yuyin = 0; // 定义变量yuyin初始值为0
lcd.init(); // 初始化LCD
lcd.backlight(); // 打开LCD背光
lcd.display(); // 打开LCD显示
lcd.clear(); // LCD清屏
}
void loop(){
Waterlevel = analogRead(WaterLevelPin); // 获取水位传感器的模拟值
// 在LCD对应位置显示水位相关信息
lcd.setCursor(0, 0);
lcd.print("Water Level:");
lcd.setCursor(0, 1);
lcd.print(Waterlevel);
if (mySerial.available() > 0) { // 接收语音控制模块的外设数据(命令参数)
yuyin = mySerial.read(); // 将接收到的外设数据(命令参数)进行赋值
Serial.println(yuyin); // 串口打印收到的外设数据(命令参数)
if (yuyin == 52) { // 进行判断,接收到的外设数据(命令参数)为52,检测水池水位并且进行语音播报
yuyin = 0;
delay(2000);
_uart_bobao7();
delay(2000);
_uart_bozhensgshu(Waterlevel);
delay(2000);
}
}
if (Waterlevel >= 800) { // 当检测到水池水位高于800时
tone(BuzzerPin,659);
delay(100);
tone(BuzzerPin,532);
delay(100);
tone(BuzzerPin,659);
delay(100);
noTone(BuzzerPin); // 关闭蜂鸣器
if (yuyin == 9) { // 进行判断,接收到的外设数据(命令参数)为9,继电器控制水泵抽水
yuyin = 0;
delay(1000);
digitalWrite(RelayPin,HIGH); // 打开继电器
delay(400); // 灌溉的延时
digitalWrite(RelayPin,LOW); // 关闭继电器
delay(700);
}
}
delay(500);
lcd.clear(); // 清除LCD显示
}
4.4.10.5 实验结果#
按照接线图接好线,外接电源,选择好正确的开发板板型(ESP32 Dev Module)和 适当的串口端口(COMxx),然后单击按钮 上传代码。上传代码成功后,将水位传感器的水位检测区插入水中(或者:用湿漉的手去触碰传感器的水位检测区,来模拟水位),LCD1602模块显示屏实时显示水位信息。
上传代码。上传代码成功后,将水位传感器的水位检测区插入水中(或者:用湿漉的手去触碰传感器的水位检测区,来模拟水位),LCD1602模块显示屏实时显示水位信息。
对着智能语音模块上的麦克风,使用唤醒词 “你好,小智” 或 “小智小智” 来唤醒智能语音模块,同时喇叭播放回复语 “有什么可以帮到您”。
智能语音模块唤醒后,对着麦克风说:“当前水位是多少” 或 “水位多少” 等命令词时,接着语音播报 “正在为您读入水位” + “当前水位为” + “水位传感器检测到的水位模拟值”。
当水位传感器检测到的水池水位模拟值高于设定的阈值时,蜂鸣器会发出警报声音,唤醒智能语音模块,对着麦克风说:“浇水” 或 “请浇水” 等命令词时,喇叭播放对应的回复语 “已开始浇水”,同时打开继电器控制水泵抽水。