4.3.7 超声波传感器#
4.3.7.1 简介#
本教程将为您详细介绍超声波传感器的使用方法和应用技巧。超声波传感器是一种利用超声波测距的电子设备,广泛应用于避障、距离测量和物体检测。教程内容包括超声波传感器的工作原理、引脚功能、电路连接方法以及如何通过微控制器(如ESP32)读取和处理测距数据。您将学习如何编写代码来实现实时距离测量、障碍物检测以及数据滤波和校准。无论您是电子初学者还是有经验的开发者,本教程都将帮助您掌握超声波传感器的应用,为您的项目增添精确的距离感知功能。
4.3.7.2 元件知识#
超声波传感器: 可以检测前方是否存在障碍物,并且检测出传感器与障碍物的详细距离。传感器主要用到CS100A芯片,它同时兼营3.3V与5V工作电压。最大测试距离为3米(实际受各种环境因素的影响,一般很难达到3米的);盲区小于4CM。
它的测距原理和蝙蝠飞行的原理一样,就是超声波模块发送出一种频率很高,人体无法听到的超声波信号。这些超声波的信号若是碰到障碍物,就会立刻反射回来,在接收到返回的信息之后,通过判断发射信号和接收信号的时间差,计算出传感器和障碍物的距离。
超声波参数:
工作电压: DC 3.3V~5V
静态电流: <2mA
工作电流: 50mA~100mA,正常为65mA
最大功率:0.5W
最大探测距离:3m
盲区:小于4cm
感应角度:不大于15度
触发输入信号:10us TTL脉冲
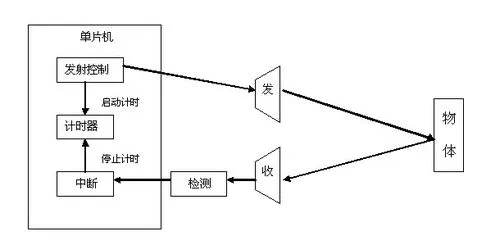
工作原理:
最常用的超声测距的方法是回声探测法。当有脉冲电压触发时(单片机给Trig引脚发送高电平),超声波发射器探头里的晶片就会振动,继而产生超声波。在超声波发射时刻的同时计数器开始计时,超声波在空气中传播,途中碰到障碍物面阻挡就立即反射回来(Echo引脚发送高电平信号给单片机),超声波接收器收到反射回的超声波就立即停止计时。
超声波是一种声波,其声速V与温度有关。一般情况下超声波在空气中的传播速度为340m/s,根据计时器记录的时间t,就可以计算出超声波探头发射点距障碍物面的距离s,即:s=340t/2 。
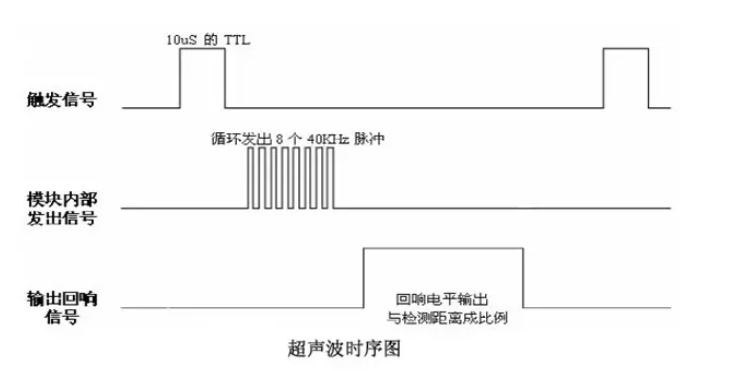
HC-SR04超声波测距模块可提供范围为2厘米至3米的非接触式距离感测功能,测距精度可达高到3mm。超声波传感器包括超声波发射器、超声波接收器与控制电路。其基本工作原理:
(1) 采用IO口Trig触发测距,给至少10us的高电平信号;
(2) 模块自动发送8个40khz的方波,自动检测是否有信号返回;
(3) 有信号返回,通过IO口Echo输出一个高电平,高电平持续的时间就是超声波从发射到返回的时间;
(4) 距离 =(高电平时间 x 声速(340M/S)) / 2
⚠️ 注意:
此模块不应在通电时连接,如有必要,先连接模块的 GND。否则,会影响模块的工作。
被测物体的面积应至少为 0.5 平方米,并尽可能平坦。否则,它会影响结果。
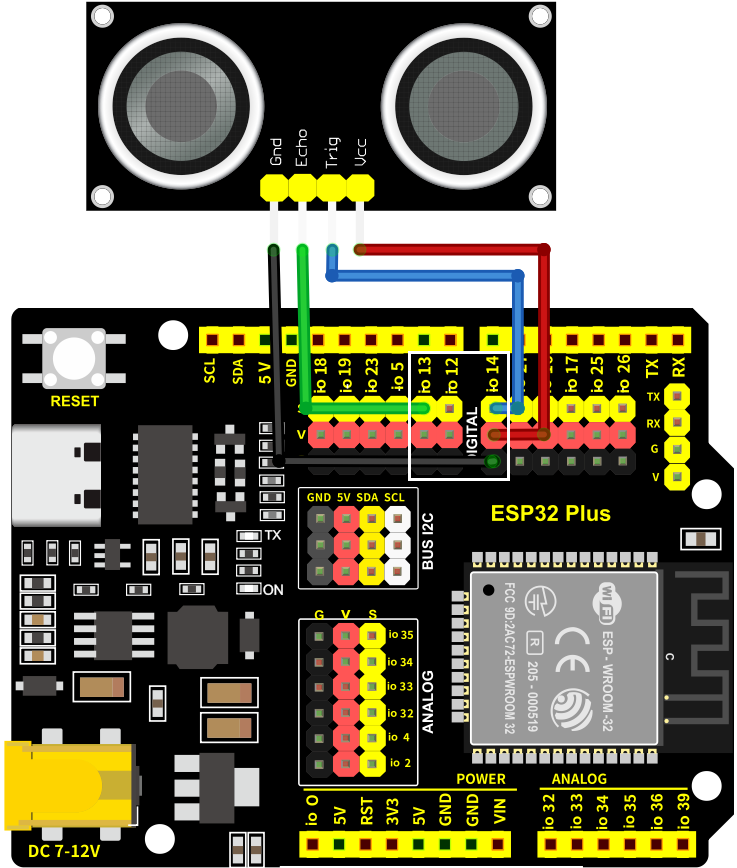
4.3.7.3 接线图#
超声波传感器的Echo引脚连接到io13,Trig引脚连接到io14
⚠️ 特别注意:智慧农场已经组装好了,这里不需要把超声波传感器拆下来又重新组装和接线,这里再次提供接线图,是为了方便您编写代码!
4.3.7.4 实验代码#
代码文件在Arduino_代码文件夹中,代码文件为4_3_7_Read_Distance,如下图所示:

鼠标双击4_3_7_Read_Distance.ino即可在Arduino IDE中打开。
/*
* 文件名 : Read_Distance
* 功能 : 读取超声波传感器检测到的距离值
* 编译IDE:ARDUINO 2.3.6
* 作者 : https://www.keyesrobot.cn/
*/
// 定义超声波传感器的引脚
const int trigPin = 14; //trig接GPIO14
const int echoPin = 13; //echo接GPIO13
// 读取传感器数据的功能原型
float readSensorData();
void setup() {
// 以9600波特率开始串行通信
Serial.begin(9600);
// 设置echoPin为输入模式,trigPin为输出模式
pinMode(trigPin, OUTPUT);
pinMode(echoPin, INPUT);
// 打印传感器信息到串行监视器
Serial.println("Ultrasonic sensor:");
}
void loop() {
// 读取超声波传感器的距离值
float distance = readSensorData();
// 将测量到的距离打印到串行监视器上
Serial.print("distance: ");
Serial.print(distance);
Serial.println(" cm");
// 读数之间的延迟
delay(100);
}
// 从超声波传感器读取数据的功能
float readSensorData() {
// 在发送高信号之前触发低信号
digitalWrite(trigPin, LOW);
delayMicroseconds(2);
// 给trigPin发送一个10微秒的高信号
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
// 返回低信号
digitalWrite(trigPin, LOW);
// 测量回声屏上高信号的持续时间
unsigned long microsecond = pulseIn(echoPin, HIGH);
// 用声速计算距离(29.00µs / cm)
float distance = microsecond / 29.00 / 2;
// 返回计算出的距离
return distance;
}
4.3.7.5 实验结果#
按照接线图接好线,外接电源,选择好正确的开发板板型(ESP32 Dev Module)和 适当的串口端口(COMxx),然后单击按钮 上传代码。上传代码成功后,单击Arduino IDE右上角的
上传代码。上传代码成功后,单击Arduino IDE右上角的 打开串口监视器窗口并设置串口波特率为
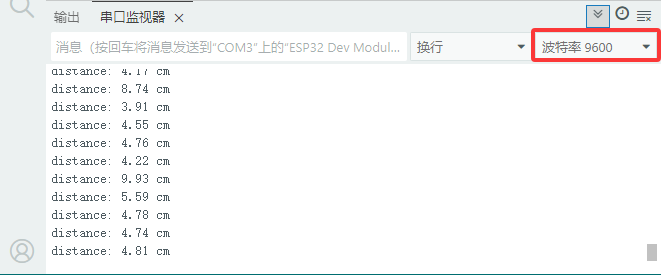
打开串口监视器窗口并设置串口波特率为9600,即可通过串口打印窗口查看超声波测距的距离值,调整超声波与障碍物的距离便能观察到距离变化。
串口现象图:
4.3.7.6 代码说明#
Serial.begin(9600); // 启动串口监视器,设置波特率为9600
功能:启动Arduino的串口通信
参数:
9600表示数据传输速率(比特/秒),一般波特率为9600或115200必须放在
setup()函数内需要配套使用
Serial.print()输出数据
pinMode(echoPin, INPUT); // 设置超声波的echoPin引脚为输入模式
pinMode()→ Arduino专用函数,用于设置引脚工作模式echoPin→ 要设置的引脚INPUT→ 设置为输入模式(读取引脚的模拟值)
val = digitalRead(echoPin); // 读取值并将其赋值给变量val
digitalRead()→ 数字输入读取函数,读取括号中引脚的高低电平(LOW或HIGH)。官方介绍:digitalRead() | Arduino DocumentationechoPin→ 连接超声波的echoPin引脚val→ 存储结果的变量(距离值)
Serial.print(distance); // 打印变量distance的值
使用串口打印变量distance的值,打印方式是不换行打印
Serial.println("Ultrasonic sensor"); // 打印 字符串 Ultrasonic sensor
使用串口打印字符串"Ultrasonic sensor",打印方式是换行打印,注意换行打印与不换行打印的函数不一样
if (val == 0) { // 读取到低电平,并打印出相关的信息
...
}
else { // 读取高电平
...
}
if→ 条件判断语句val == 0→ 判断条件(val是否等于0),如果val等于0则执行if下方的代码,val不等于0则执行else下方的代码else→ 当条件不成立时执行
float distance = readSensorData(); // 用于存储超声波的距离值
定义一个名为"distance"的float类型的变量值,它可以存放小数
官方介绍:float | Arduino Documentation
float readSensorData() {
...
}
超声波测距函数,这个函数是自定义函数,目的是方便读取超声波距离并且使代码简单化。
delayMicroseconds(2);
微秒延时函数,官方介绍:delayMicroseconds() | Arduino Documentation
1s = 1000ms ; 1ms = 1000us
unsigned long microsecond = pulseIn(echoPin, HIGH);
读取引脚脉冲函数。官方介绍:pulseIn() | Arduino Documentation
return distance;
返回函数,终止函数并将值从函数返回给调用函数。官方介绍:return | Arduino Documentation