4.3.5 舵机模块#
4.3.5.1 简介#
本教程将为您详细介绍舵机模块的使用方法和应用技巧。舵机是一种能够精确控制角度的电机,广泛应用于机器人、遥控模型和自动化设备中。教程内容包括舵机的工作原理、引脚功能、电路连接方法以及如何通过微控制器(如ESP32)控制舵机的转动角度。您将学习如何编写代码来实现舵机的精确位置控制、平滑运动以及多舵机协同工作。无论您是电子初学者还是有经验的开发者,本教程都将帮助您掌握舵机模块的应用,为您的项目增添灵活的机械控制功能。
4.3.5.2 元件知识#

控制原理:舵机的转动的角度是通过调节PWM(脉冲宽度调制)信号的占空比来实现的,标准PWM(脉冲宽度调制)信号的周期固定为20ms(50Hz),理论上脉宽分布应在1ms到2ms 之间,但是,事实上脉宽可由0.5ms 到2.5ms 之间,脉宽和舵机的转角0°~180°相对应。有一点值得注意的地方,由于舵机牌子不同,对于同一信号,不同牌子的舵机旋转的角度也会有所不同。
引脚介绍:
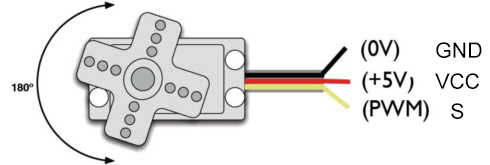
GND: 一个接地的引脚,棕色
VCC: 一个连接到+5V电源的引脚,红色
S: 信号端的引脚,PWM信号控制,橙色
内部结构图:
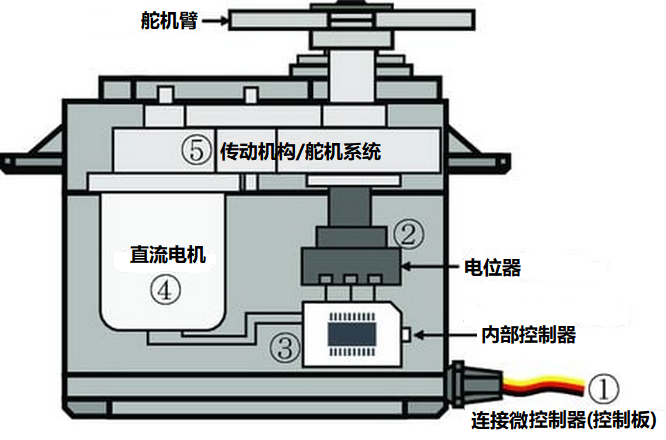
信号线:接收来自微控制器的控制信号;
电位器:可以测量输出轴的位置量,属于整个舵机机构的反馈部分;
内部控制器:处理来自外部控制的信号,驱动电机以及处理反馈的位置信号,是整个伺服机构的核心;
直流电机:作为执行机构,输出多少转速,转矩,位置;
传动机构/舵机系统:该机构根据一定传动比,将电机输出的行程缩放到最终输出的角度上。
驱动舵机:
通过向舵机的信号信号线发送PWM信号来控制舵机的输出量,PWM脉冲的占空比直接决定了输出轴的位置。
例如(这里以180°舵机为例):
当我们向180°舵机发送脉冲宽度为1.5毫秒(ms)的信号时,舵机的输出轴将移至中间位置(90度);
脉冲宽度为
0.5ms时,舵机的输出轴将移至最小的位置(0度);脉冲宽度为
2.5ms时,舵机的输出轴将移至最大的位置(180度)。
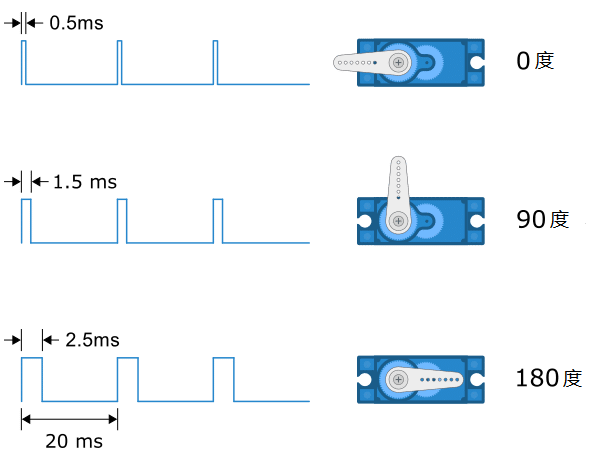
舵机的周期通常为20毫秒,希望以50Hz的频率产生脉冲,但是许多伺服器在40至200 Hz的范围内也都能正常工作。
注: 不同类型和品牌的舵机之间最大位置和最小位置的角度可能会不同。许多舵机仅旋转约170度(或者只有90度),但宽度为1.5ms的伺服脉冲通常会将伺服设置为中间位置(通常是指定全范围的一半)。
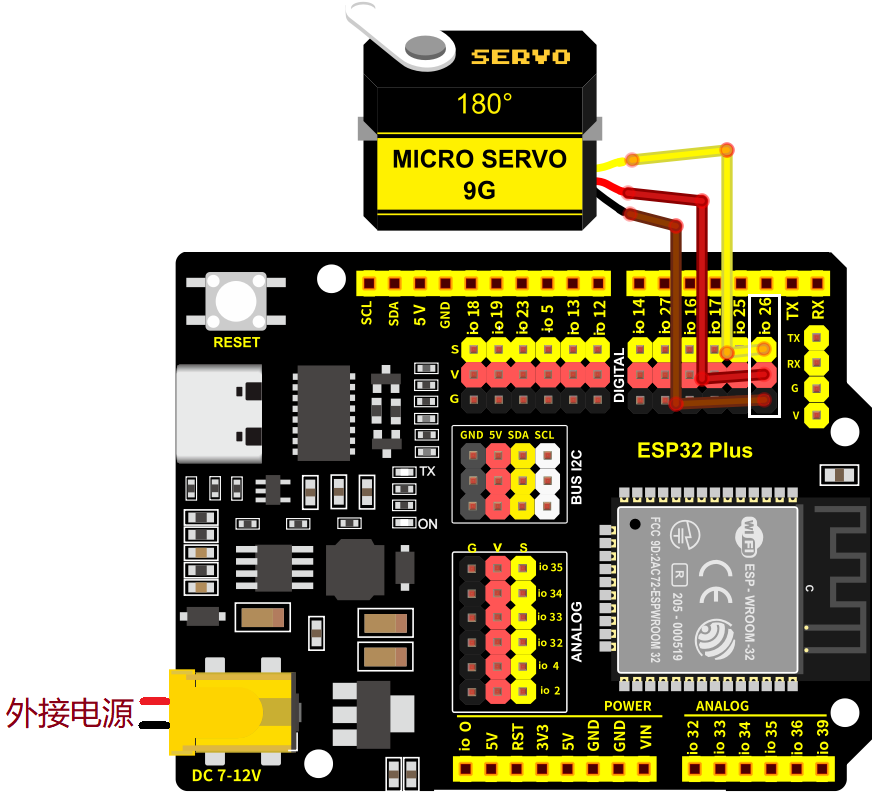
4.3.5.3 接线图#
舵机的黄色线连接到io26
⚠️ 特别注意:智慧农场已经组装好了,这里不需要把舵机拆下来又重新组装和接线,这里再次提供接线图,是为了方便您编写代码!
4.3.5.4 实验代码#
⚠️ 特别注意: 上传代码前要添加库文件,库文件存放在Arduino_库文件文件夹中名为ESP32Servo.zip。
代码文件在Arduino_代码文件夹中,代码文件为4_3_5_Servo,如下图所示:

鼠标双击4_3_5_Servo.ino即可在Arduino IDE中打开。
/*
* 文件名 : Servo
* 功能 : 舵机转动
* 编译IDE:ARDUINO 2.3.6
* 作者 : https://www.keyesrobot.cn/
*/
#include <ESP32Servo.h> //需要导入ESP32开发板的舵机库
Servo myservo; // 创建舵机对象来控制舵机,在ESP32上可以创建16个舵机对象
int pos = 0; // 定义变量存储舵机位置
// ESP32上推荐的PWM GPIO引脚包括2、4、12-19、21-23、25-27、32-33
int servoPin = 26;
void setup() {
myservo.attach(servoPin); // 将引脚26上的舵机连接到舵机对象上
myservo.write(180);
delay(1000);
}
void loop() {
for (pos = 180; pos >= 80; pos -= 1) { // 从180度到80度
myservo.write(pos); // 告诉舵机到变量“pos”的位置
delay(15); // 每次等待15ms让舵机到达对应的位置
}
for (pos = 80; pos <= 180; pos += 1) { // 从80度到180度
// 每次15度
myservo.write(pos); //告诉舵机到变量“pos”的位置
delay(15); // 每次等待15ms让舵机到达对应的位置
}
}
4.3.5.5 实验结果#
按照接线图接好线,外接电源,选择好正确的开发板板型(ESP32 Dev Module)和 适当的串口端口(COMxx),然后单击按钮 上传代码。上传代码成功后可以看到饲料盒在慢慢打开,慢慢关闭,实现可控制的。
上传代码。上传代码成功后可以看到饲料盒在慢慢打开,慢慢关闭,实现可控制的。
注意:SG90舵机是180度,在套件中的饲料盒较小,SG90舵机只需旋转100度,就能完全关闭饲料盒。
80度:完全打开。
120度:打开一半。
180度:关闭。
⚠️ 注意:请勿将手指伸入到饲料盒中,谨防夹伤!请勿将其他物体堵住饲料盒盖,以免弄坏舵机。