Pico主板_Python_教程#
1. 树莓派Pico主板:#
1. 简介:#
在我们开始学习keyes 火焰检测套件之前,首先介绍树莓派Pico主板,它是所有项目的核心。
2021年1月底的时候,树莓派基金会发布了一个重磅消息,推出了进军微控制器领域的树莓派Pico。功能强劲,价格便宜的特性让树莓派Pico受到了全世界创客们的关注,下面就来给大家介绍一下树莓派Pico这个小玩意儿。
树莓派Pico主板是一块小小的板子,大小和Arduino Nano 主板差不多,为21mm × 51mm。
树莓派Pico是具有灵活数字接口的低成本高性能微控制器板。它集成了树莓派自己的RP2040微控制器芯片,运行速度高达133 MHz的双核Arm Cortex M0 +处理器,嵌入式264KB SRAM和2MB板载闪存以及26个多功能GPIO引脚。对于软件开发,可以使用树莓派的C/C++SDK或MicroPython。
裸板不带针脚,需要自己焊。这是一块做工精良的电路板,也可以作为SMD元件,直接焊接到印刷电路板上。
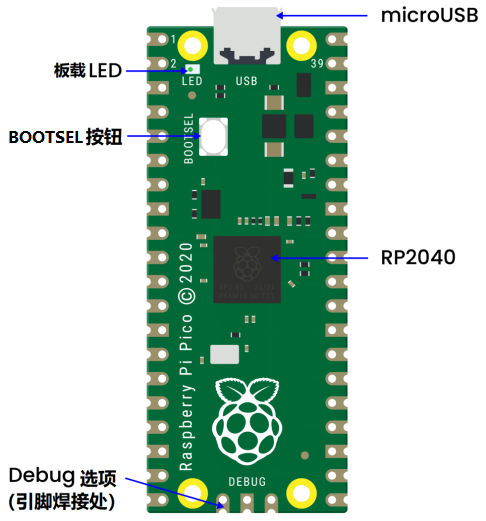
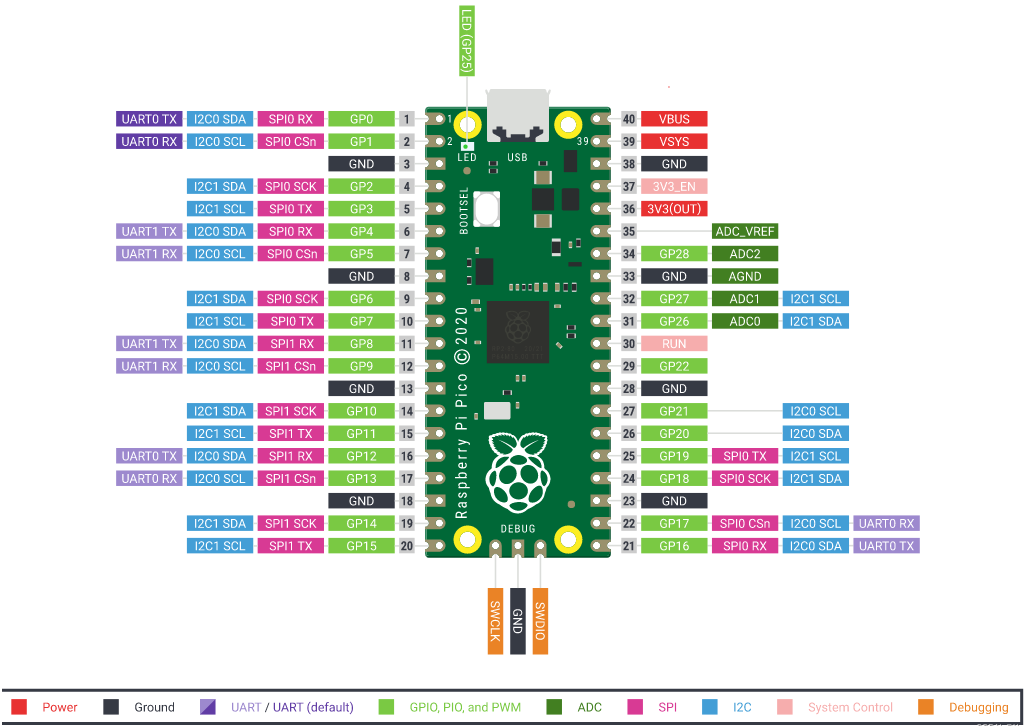
主板上最主要的功能是一端的microUSB连接器。它既用于通信,也用于给Raspberry Pi Pico供电。
在microUSB连接器旁边安装了一个板载LED,它内部连接到GPIO针脚25,这是整个树莓派Pico主板上唯一的LED。开机按钮安装在离LED稍低一点的地方,它可以让你改变树莓派Pico的启动模式,这样你就可以在上面加载MicroPython,进行拖拽式编程。 在板子的底部,你会看到三个连接点,这些连接点是用于串行Debug选项的,我们今天是入门,暂时不探讨这个问题,高级开发者会比较感兴趣。
在板子的中央是整个板子的“大脑”——RP2040 MCU,RP2040能够支持高达16MB的片外闪存,不过在Raspberry Pi Pico中只有4MB。
双核32位ARM Cortex-M0+处理器。
运行在48MHz,但可以超频到133MHz。
30个GPIO引脚(26个暴露)。
可支持USB主机或设备模式。
8个可编程I/O(PIO)状态机。
树莓派Pico主板是一个3.3V的逻辑器件,但由于内置了电压转换器和稳压器,它可以用一系列电源供电。
GND–––地线,8个地线加上3针Debug连接器上的一个附加地线,是方形的,而不是像其他连接的圆形。
VBUS–––这是来自microUSB总线的电源(5V)。如果树莓派Pico主板不是由microUSB连接器供电,那么这里将没有输出。
VSYS–––这是输入电压,范围为2V至5V。板载电压转换器将为树莓派Pico主板将其改为3.3V。
3V3–––这是树莓派Pico主板内部调节器的3.3V输出。只要将负载保持在300MA以下,它就可用于为其他组件供电。
3V3_EN–––你可以使用此输入禁用树莓派Pico主板的内部电压调节器,从而关闭 树莓派Pico主板和由其供电的任何组件。
RUN–––可以启用或禁用RP2040微控制器,也可以将其复位。
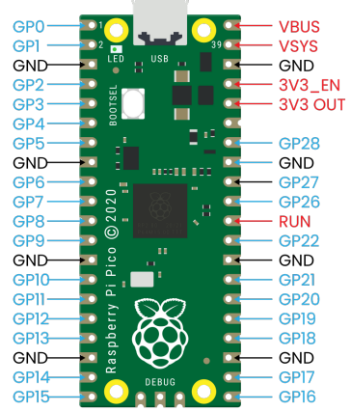
树莓派Pico主板上有26个裸露的GPIO连接,它们的排列顺序很好,在GP22和GP26之间有“空隙”(这些“缺失”的引脚在内部使用)。这些引脚都有多种功能,你可以为PWM配置多达16个引脚。有两个I2C总线,两个UART和两个SPI总线,这些可以配置使用多种GPIO引脚。
树莓派Pico主板有三个模数转换器分别为ADC0-GP26、ADC1-GP27、ADC2-GP28还有一个内部用于板载温度传感器的转换器ADC-VREF。注意:ADC的分辨率为12位。但MicroPython把范围映射到16位,也就是从0到65535,微处理器的工作电压是3.3V,也就是说0对应着0V,65535对应着3.3V。
你也可以在ADC_VREF引脚上提供一个外部精密电压参考。其中一个接地点,即33脚上的ADC_GND被用作该参考点的接地点。
树莓派Pico主板的配置 |
|---|
双核 Arm Cortex-M0 + @ 133MHz |
2 个 UART、2 个 SPI 控制器和 2 个 I2C 控制器 |
芯片内置 264KB SRAM 和 2MB 的板载闪存 |
16 个 PWM 通道1 |
通过专用 QSPI 总线支持最高 16MB 的片外闪存 |
USB 1.1 主机和设备支持 |
DMA 控制器 |
8 个树莓派可编程 I/O(PIO)状态机,用于自定义外围设备支持 |
30 个 GPIO 引脚,其中 4 个可用作模拟输入 |
支持 UF2 的 USB 大容量存储启动模式,用于拖放式编程 |
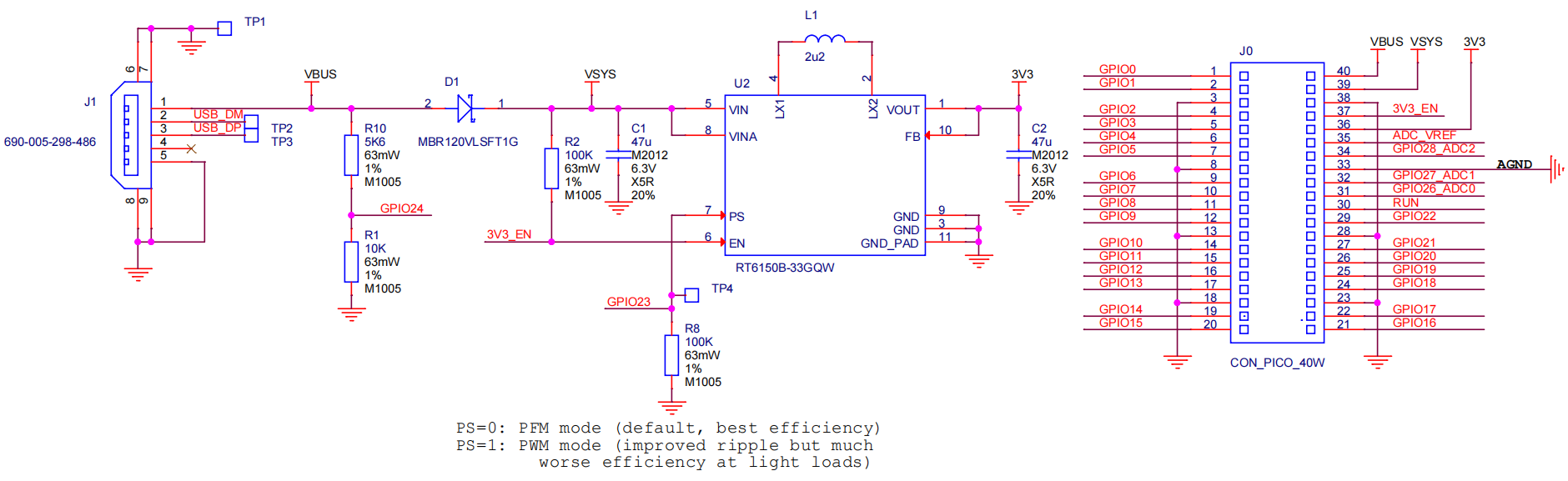
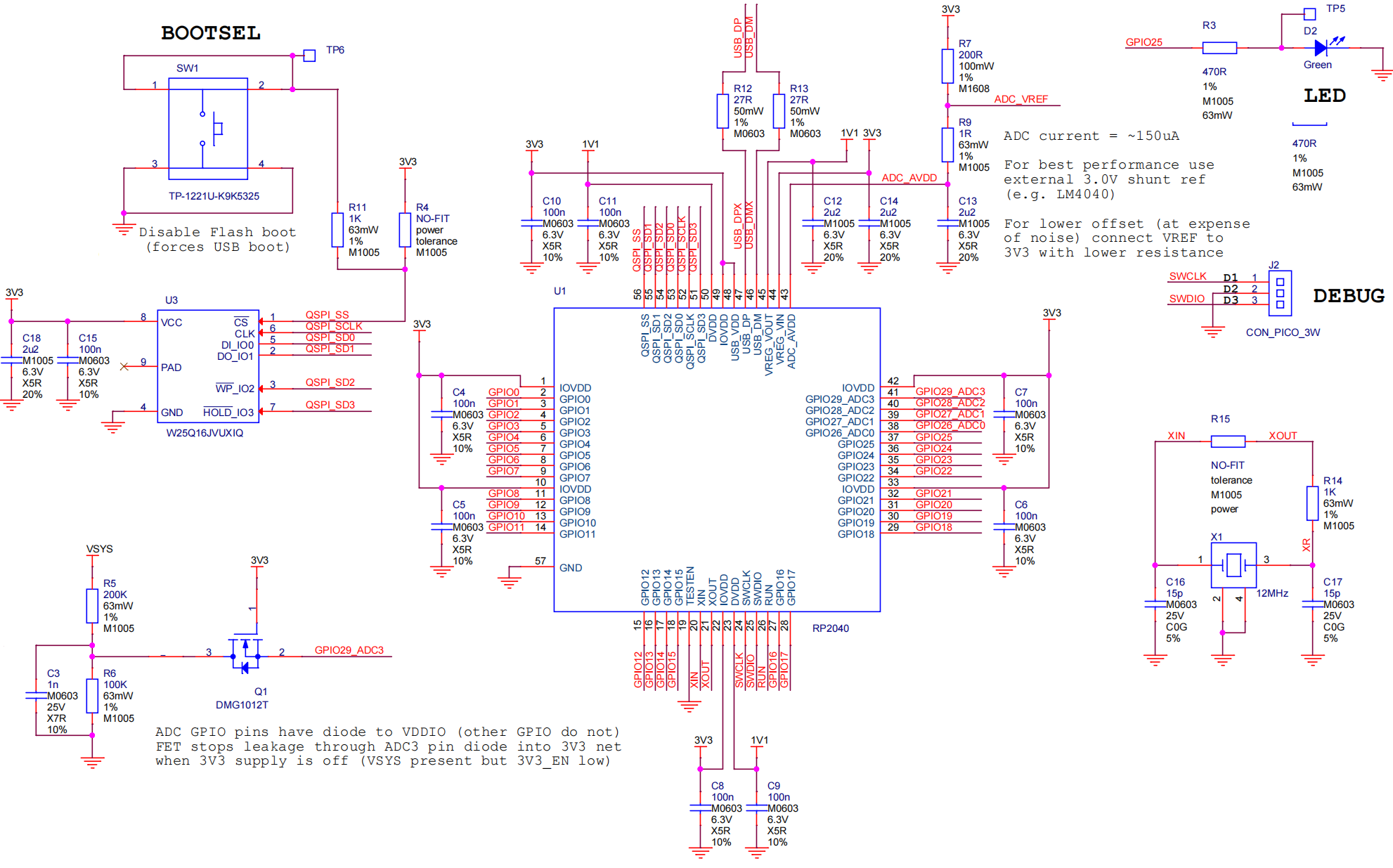
2. 原理图:#
3. 完整引脚图:#
树莓派也在官网发布了一大堆技术文档,还有一本名为《Get Started with MicroPython on Raspberry Pi Pico》的说明书。它有纸质版,也有PDF版下载。
更多详情请了解树莓派官方网站:
2. Thonny IDE 的下载、安装和使用方法#
参考链接:https://www.keyesrobot.cn/projects/Thonny/zh-cn/latest/
注意:Pico主板_Python_教程使用的是Pico-Thonny IDE 的下载、安装和使用方法。
3. 课程#
项目01 Hello World#
1. 项目介绍:#
对于树莓派Pico初学者,我们将从一些简单的东西开始。在这个项目中,您只需要一个树莓派Pico板和MicroUSB线来完成“Hello World!”项目。它不仅是树莓派Pico板和计算机的通信测试,也是树莓派Pico板的初级项目。
2. 项目元件:#
|
|
|---|---|
树莓派Pico主板*1 |
MicroUSB线*1 |


3. 项目接线:#
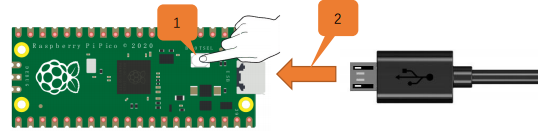
①连接microUSB线一端到你的电脑USB口。
②长按“树莓派Pico主板”上的白色按钮(BOOTSEL)。然后,通过microUSB线另一端将树莓派Pico板与电脑连接。
4. 在线运行代码:#
要在线运行树莓派Pico,你需要把树莓派Pico主板连接到电脑上。这样就可以使用Thonny软件编译或调试程序。
优点: 1. 你们可以使用Thonny软件编译或调试程序。
2. 通过“Shell”窗口,你们可以查看程序运行过程中产生的错误信息和输出结果,并可以在线查询相关功能信息,帮助改进程序。
缺点: 1.要在线运行树莓派Pico,你必须将树莓派Pico主板连接到一台电脑上并和Thonny软件一起运行。
2.如果树莓派Pico主板与电脑断开连接,当它们重新连接时,程序将无法再次运行。
特别注意:本教程中使用的代码保存的路径为:“…\代码集\6.Pico主板_Python_教程”中。
基本操作:
1.打开Thonny软件,并且单击 “打开…”。
“打开…”。
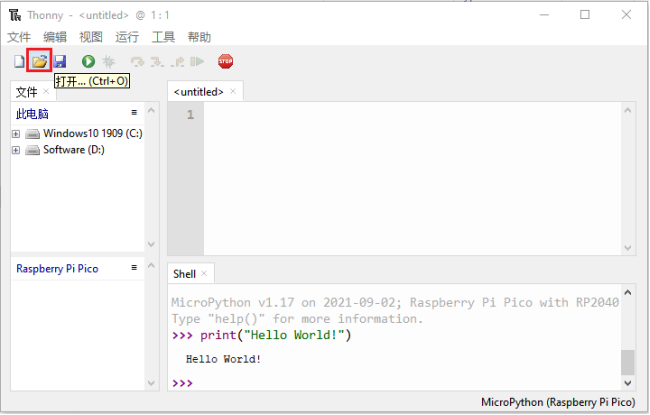
2.在新弹出的窗口中,点击“此电脑”。

3.在新的对话框中,选中“Project_01_HelloWorld.py”,单击“打开”。

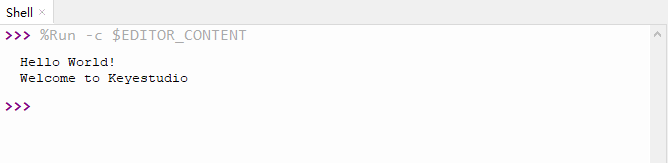
print("Hello World!")
print("Welcome to Keyestudio")
5. 项目现象:#
利用MicroUSB线连接到计算机上电,单击 来执行程序代码。代码开始执行,你会看到的现象是:“Shell”窗口打印出“Hello World!”、“Welcome to Keyestudio”。
来执行程序代码。代码开始执行,你会看到的现象是:“Shell”窗口打印出“Hello World!”、“Welcome to Keyestudio”。
当在线运行时,单击 或按Ctrl+C退出程序。
或按Ctrl+C退出程序。
项目02 点亮LED#
1. 项目介绍:#
在这个项目中,我们将向你展示点亮LED。我们是使用树莓派Pico主板的数字引脚来打开LED,使LED被点亮。
2. 项目元件:#
|
|
|
|---|---|---|
树莓派Pico主板*1 |
面包板*1 |
红色LED*1 |
|
|
|
220Ω电阻*1 |
面包板连接线*2 |
MicroUSB线*1 |


3. 元件知识:#
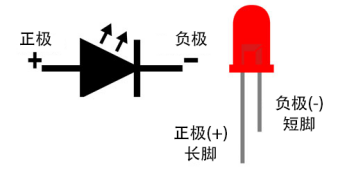
(1)LED

LED是一种被称为“发光二极管”的半导体,是一种由半导体材料(硅、硒、锗等)制成的电子器件。它有正极和负极。短腿为负极,接GND,长腿为正极,接3.3V或5V。
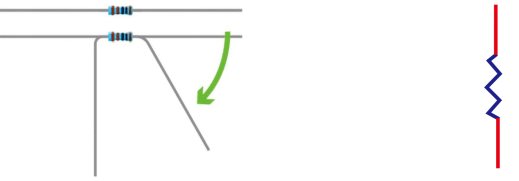
(2)五色环电阻
电阻是电路中限制或调节电流流动的电子元件。左边是电阻器的外观,右边是电阻在电路中表示的符号。电阻®的单位为欧姆(Ω),1 mΩ= 1000 kΩ,1kΩ= 1000Ω。
我们可以使用电阻来保护敏感组件,如LED。电阻的强度(以Ω为单位)用小色环标记在电阻器的主体上。每种颜色代表一个数字,你可以用电阻对照卡查找。
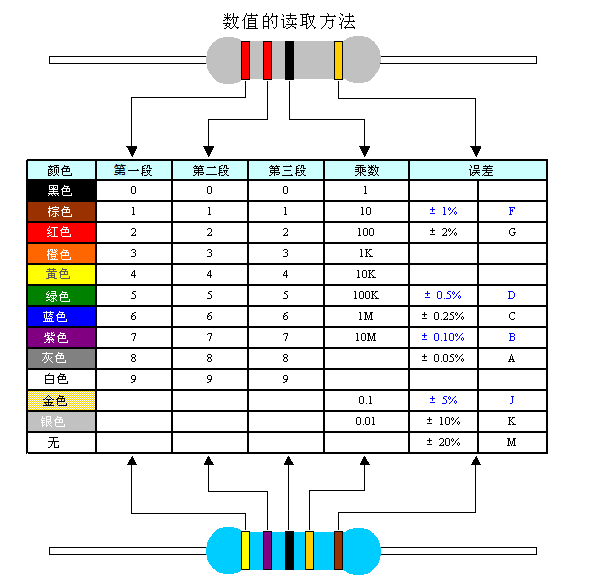
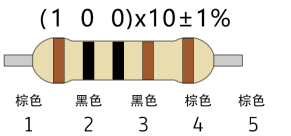
在这个套件中,我们提供了2个具有不同电阻值的五色环电阻。这里以2个五色环电阻为例:
220Ω电阻×10
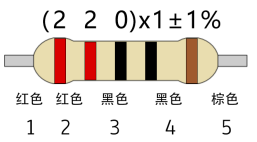
1KΩ电阻×10
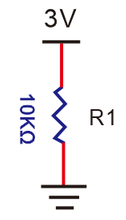
在相同的电压下,会有更小的电流和更大的电阻。电流、电压、电阻之间的联系可以用公式表示:I=U/R。在下图中,目前通过R1的电流: I = U / R = 3 V / 10 KΩ= 0.0003A= 0.3mA。
不要把电阻值很低的电阻直接连接在电源两极,这样会使电流过高而损坏电子元件。电阻是没有正负极之分。
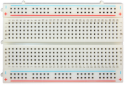
(3)面包板
面包板是实验室中用于搭接电路的重要工具。面包板上有许多孔,可以插入集成电路和电阻等电路元件。熟练掌握面包板的使用方法是提高实验效率,减少实验故障出现几率的重要基础之一。下面就面包板的结构和使用方法做简单介绍。一个典型的面包板如下所示:
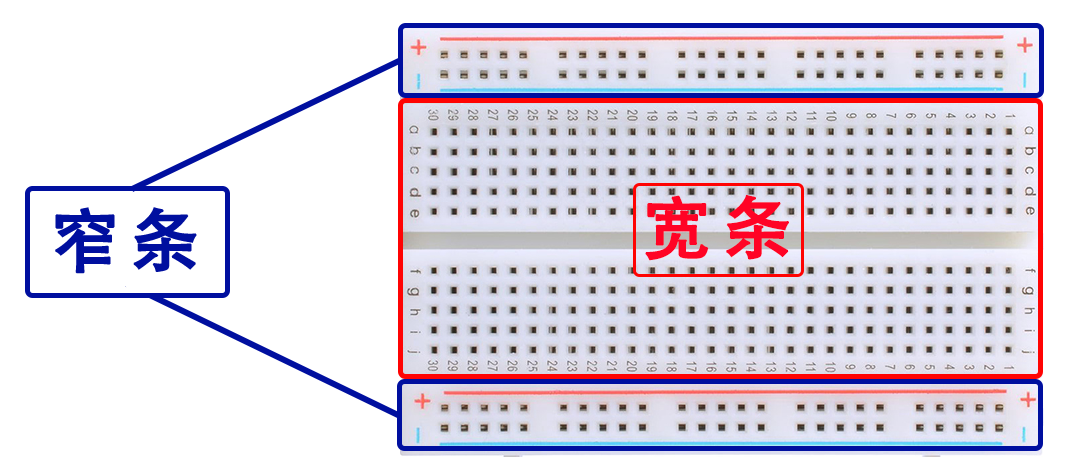
面包板的外观和内部结构如上图所示,常见的最小单元面包板分上、中、下三部分,上面和下面部分一般是由一行或两行的插孔构成的窄条,中间部分是由中间一条隔离凹槽和上下各5 行的插孔构成的条。
在面包板的两个窄条分别有两行插孔,两行之间是不连通的,一般是作为电源引入的通路。上方第一行标有“+”的一行有10组插孔(内部都是连通),均为正极;上方第二行标有“-”的一行有10组插孔,(内部都是连通),均为接地。面包板下方的第一行与第二行结构同上。如需用到整个面包板,通常将“+”与“+”用导线连接起来,“-”与“-”用导线连接起来。
中间部分宽条是由中间一条隔离凹槽和上下各5 行的插孔构成。在同一列中的5 个插孔是互相连通的,列和列之间以及凹槽上下部分则是不连通的。外观及结构如下图:
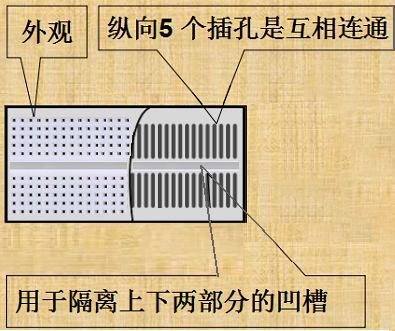
中间部分宽条的连接孔分为上下两部分,是面包板的主工作区,用来插接原件和面包板连接线。在同一列中的5个插孔(即a-b-c-d-e,f-g-h-i-j)是互相连通的;列和列之间以及凹槽上下部分是不连通的。在做实验的时候,通常是使用两窄一宽组成的小单元,在宽条部分搭接电路的主体部分,上面的窄条取一行做电源,下面的窄条取一行做接地。中间宽条用于连接电路,由于凹槽上下是不连通的,所以集成块一般跨插在凹槽上。
(4)电源
树莓派Pico主板需要3.3V-5V电源,在本项目中,我们通过用MicroUSB线将树莓派Pico主板和电脑连起来。
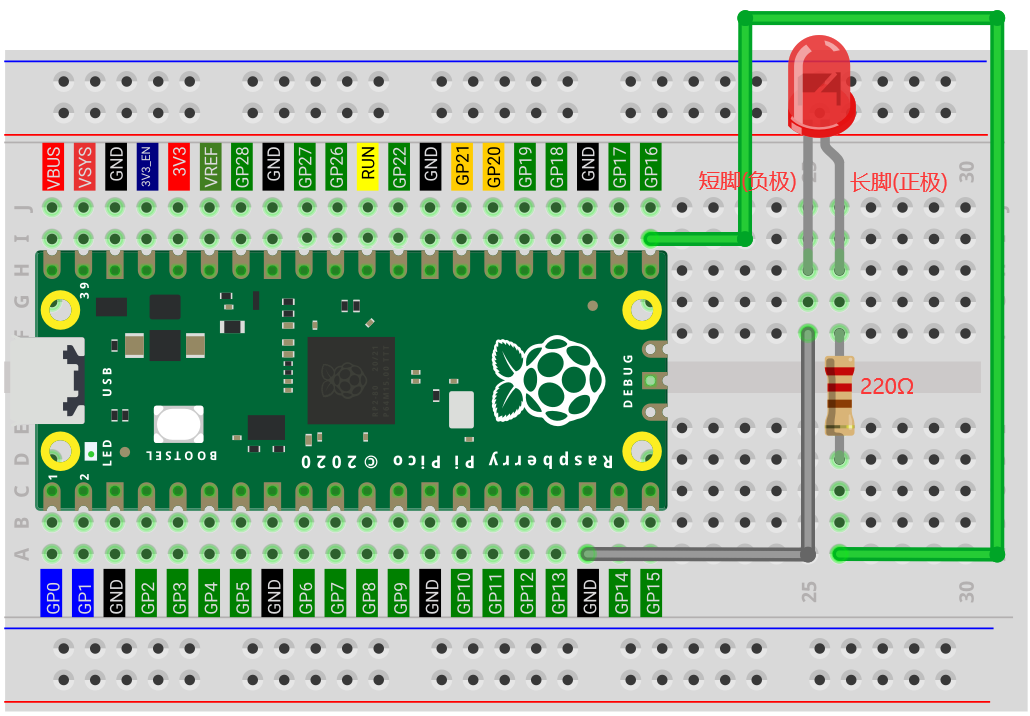
4. 项目接线图:#
5. 在线运行代码:#
特别注意:本教程中使用的代码保存的路径为:“…\代码集\6.Pico主板_Python_教程”中。
1.打开Thonny软件,并且单击“打开…”。
2.在新弹出的窗口中,点击“此电脑”。
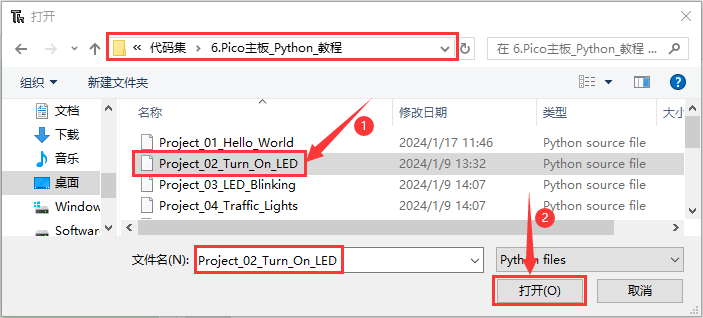
在新的对话框中,选中“Project_02_Turn_On_LED.py”,单击“打开”。
from machine import Pin
import time
led = Pin(16, Pin.OUT) # 从引脚GPIO16创建LED对象,设置引脚GPIO16为输出模式
try:
while True:
led.value(1) # 设置led开启
except:
pass
6. 项目现象:#
按照接线图正确接好模块,利用MicroUSB线连接到计算机上电,单击来执行程序代码。代码开始执行,你会看到的现象是:LED被点亮。
当在线运行时,单击或按Ctrl+C退出程序。
7. 代码说明:#
代码 |
说明 |
|---|---|
from machine import Pin |
machine模块里对树莓派Pico主板的一些配置等已经设置好了,我们需导入它,然后调用。 |
led = Pin(16, Pin.OUT) |
构建一个引脚类实例,我们将其命名为led,16表示我们连接的引脚为GPIO16,Pin.OUT表示引脚16为输出模式,即可以使用value()方法输出高电平(3.3V) :led.value(1),或者低电平(0V) :led.value(0)。 |
while True: |
循环函数,在此函数下面的语句循环执行,除非True变False。 |
项目03 LED闪烁#
1. 项目介绍:#
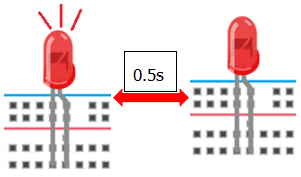
在这个项目中,我们将向你展示LED闪烁效果。我们是使用树莓派Pico主板的数字引脚来打开LED,让它闪烁。
2. 项目元件:#
|
|
|
|---|---|---|
树莓派Pico主板*1 |
面包板*1 |
红色LED*1 |
|
|
|
220Ω电阻*1 |
面包板连接线*2 |
MicroUSB线*1 |
3. 项目接线图:#
4. 在线运行代码:#
特别注意:本教程中使用的代码保存的路径为:“…\代码集\6.Pico主板_Python_教程”中。
1.打开Thonny软件,并且单击“打开…”。
2.在新弹出的窗口中,点击“此电脑”。
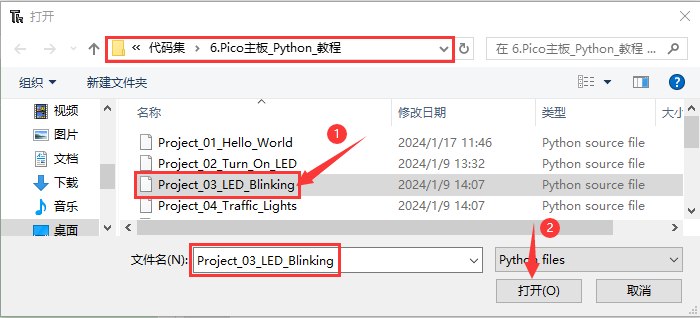
在新的对话框中,选中“Project_03_LED_Blinking.py”,单击“打开”。
from machine import Pin
import time
led = Pin(16, Pin.OUT) # 从引脚GPIO16创建LED对象,设置引脚GPIO16为输出模式
try:
while True:
led.value(1) # 设置led开启
time.sleep(0.5) # 延时 0.5秒
led.value(0) # 设置led关闭
time.sleep(0.5) # 延时 0.5秒
except:
pass
5. 项目现象:#
按照接线图正确接好各元器件,利用USB线连接到计算机上电,单击来执行程序代码。代码开始执行,你会看到的现象是:LED闪烁。
当在线运行时,单击或按Ctrl+C退出程序。
6. 代码说明:#
代码 |
说明 |
|---|---|
from machine import Pin |
machine模块里对树莓派Pico主板的一些配置等已经设置好了,我们需导入它,然后调用。 |
led = Pin(16, Pin.OUT) |
构建一个引脚类实例,我们将其命名为led,16表示我们连接的引脚为GPIO16,Pin.OUT表示引脚16为输出模式,即可以使用value()方法输出高电平(3.3V) :led.value(1),或者低电平(0V) :led.value(0)。 |
while True: |
循环函数,在此函数下面的语句循环执行,除非True变False。 |
time.sleep(0.5) |
time模块主要是用于时间延迟设置。括号里是0.5,延时0.5秒。 |
项目04 交通灯#
1. 项目介绍:#
交通灯在我们的日常生活中很普遍。根据一定的时间规律,交通灯是由红、黄、绿三种颜色组成的。每个人都应该遵守交通规则,这可以避免许多交通事故。在这个项目中,我们将使用树莓派Pico主板和一些led(红,黄,绿)来模拟交通灯。
2. 项目元件:#
|
|
|
|
|---|---|---|---|
树莓派Pico主板*1 |
面包板*1 |
红色LED*1 |
黄色LED*1 |
|
|
|
|
绿色LED*1 |
220Ω电阻*3 |
面包板连接线若干 |
MicroUSB线*1 |


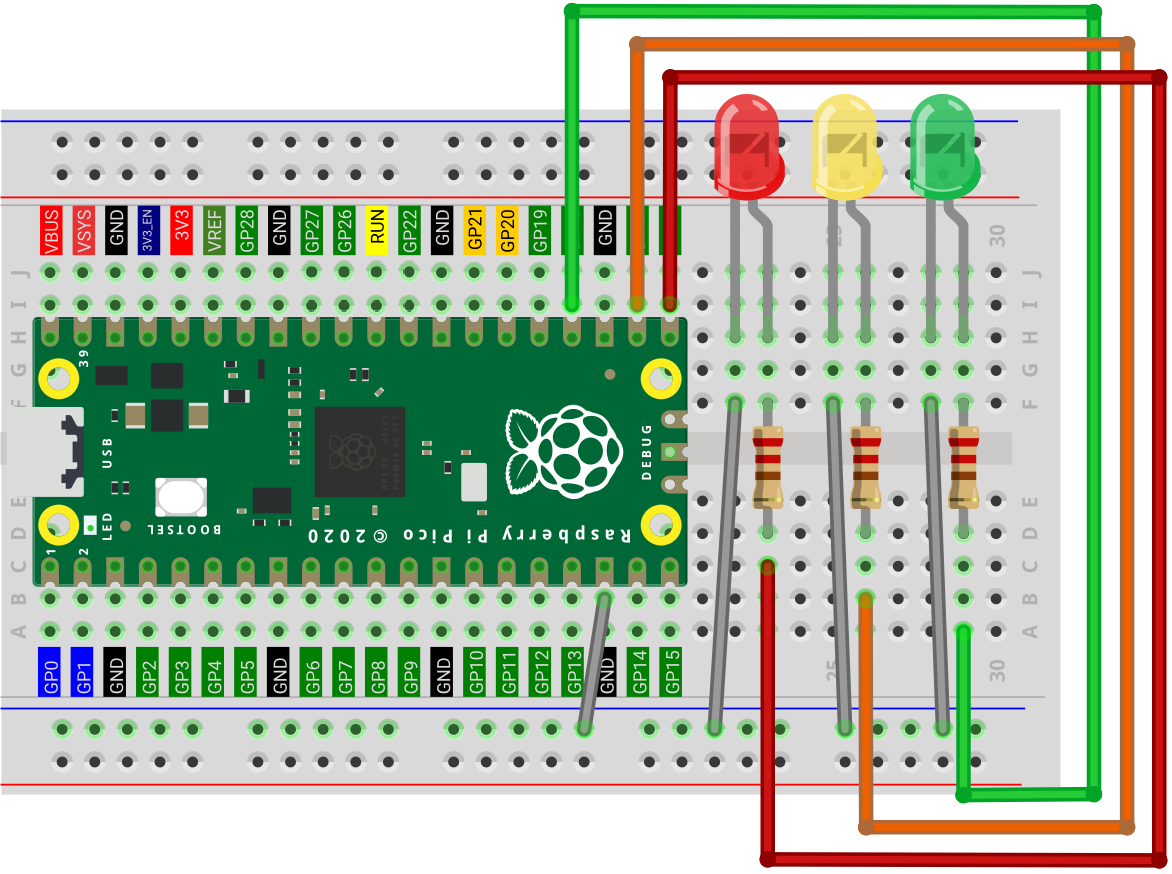
3. 项目接线图:#
4. 在线运行代码:#
特别注意:本教程中使用的代码保存的路径为:“…\代码集\6.Pico主板_Python_教程”中。
1.打开Thonny软件,并且单击“打开…”。
2.在新弹出的窗口中,点击“此电脑”。
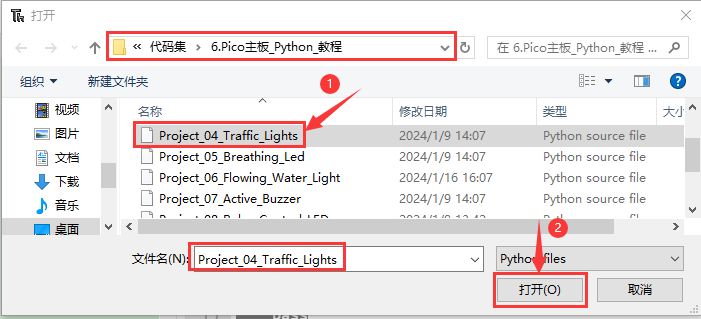
在新的对话框中,选中“Project_04_Traffic_Lights.py”,单击“打开”。
from machine import Pin
import time
led_red = machine.Pin(16, machine.Pin.OUT) # 从引脚GPIO16创建红色led对象,设置引脚GPIO16为输出模式
led_yellow = machine.Pin(17, machine.Pin.OUT) # 从引脚GPIO17创建黄色led对象,设置引脚GPIO17为输出模式
led_green = machine.Pin(18, machine.Pin.OUT) # 从引脚GPIO18创建绿色led对象,设置引脚18输出模式
while True:
led_green.value(1) # 设置绿色led灯亮
time.sleep(5) # 延时 5秒
led_green.value(0) # 设置绿色led关闭
led_yellow.value(1)
time.sleep(0.5)
led_yellow.value(0)
time.sleep(0.5)
led_yellow.value(1)
time.sleep(0.5)
led_yellow.value(0)
time.sleep(0.5)
led_yellow.value(1)
time.sleep(0.5)
led_yellow.value(0)
time.sleep(0.5)
led_red.value(1)
time.sleep(5)
led_red.value(0)
5. 项目现象:#
按照接线图正确接好各元器件,利用MicroUSB线连接到计算机上电,单击来执行程序代码。代码开始执行,你会看到的现象是:1.首先,绿灯会亮5秒,然后熄灭;2.其次,黄灯会闪烁3次,然后熄灭;3.然后,红灯会亮5秒,然后熄灭;4.继续运行上述1-3个步骤。
当在线运行时,单击或按Ctrl+C退出程序。
6. 代码说明:#
可以参照项目03的代码说明,这里就不多做介绍了。
项目05 呼吸灯#
1. 项目介绍:#
在之前的研究中,我们知道LED有亮/灭状态,那么如何进入中间状态呢? 如何输出一个中间状态让LED“半亮”? 这就是我们将要学习的。呼吸灯,即LED由灭到亮,再由亮到灭,就像“呼吸”一样。那么,如何控制LED的亮度呢? 我们将使用树莓派Pico主板的PWM来实现这个目标。
2. 项目元件:#
|
|
|
|---|---|---|
树莓派Pico主板*1 |
面包板*1 |
红色LED*1 |
|
|
|
220Ω电阻*1 |
面包板连接线*2 |
MicroUSB线*1 |
3. 元件知识:#

模拟信号 & 数字信号
模拟信号在时间和数值上都是连续的信号。相反,数字信号或离散时间信号是由一系列数字组成的时间序列。生活中的大多数信号都是模拟信号,一个熟悉的模拟信号的例子是:全天的温度是连续不断变化的,而不是突然从0到10的瞬间变化。然而,数字信号的值可以瞬间改变。这个变化用数字表示为1和0(二进制代码的基础)。如下图所示,我们可以更容易地看出它们的差异。
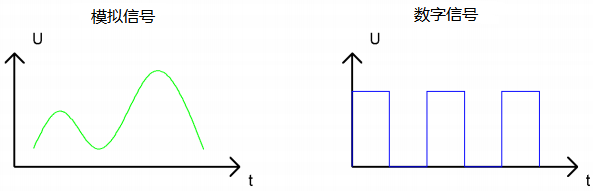
在实际应用中,我们经常使用二进制作为数字信号,即一系列的0和1。由于二进制信号只有两个值(0或1),因此具有很大的稳定性和可靠性。最后,可以将模拟信号和数字信号相互转换。
PWM:
脉宽调制(PWM)是一种利用数字信号控制模拟电路的有效方法。普通处理器不能直接输出模拟信号。PWM技术使这种转换(将数字信号转换为模拟信号)非常方便。PWM技术利用数字引脚发送一定频率的方波,即高电平和低电平的输出,交替持续一段时间。每一组高电平和低电平的总时间一般是固定的,称为周期(注:周期的倒数是频率)。高电平输出的时间通常称为脉宽,占空比是脉宽(PW)与波形总周期(T)之比的百分比。高电平输出持续时间越长,占空比越长,模拟信号中相应的电压也就越高。下图显示了对应于脉冲宽度0%-100%的模拟信号电压在0V-3.3V(高电平为3.3V)之间的变化情况.
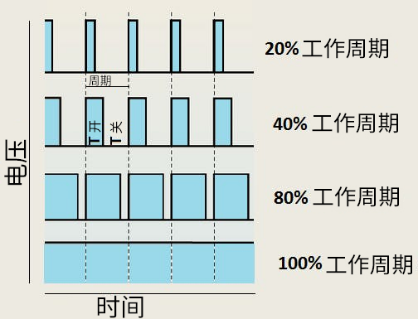
PWM占空比越长,输出功率越高。既然我们了解了这种关系,我们就可以用PWM来控制LED的亮度或直流电机的速度等等。从上面可以看出,PWM并不是真实的模拟信号,电压的有效值等于相应的模拟信号。因此,我们可以控制LED和其他输出模块的输出功率,以达到不同的效果。
树莓派Pico主板与PWM
树莓派Pico主板有16个PWM通道,每个PWM通道可以独立控制频率和占空比,时钟频率范围为7Hz到125MHz。树莓派Pico主板上的16个PWM通道都可以配置为PWM输出。
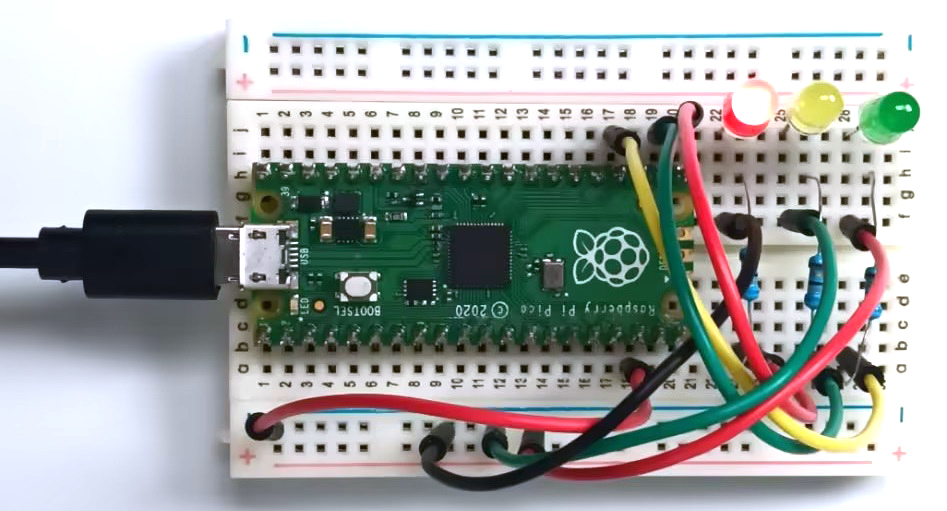
4. 项目接线图:#
5. 在线运行代码:#
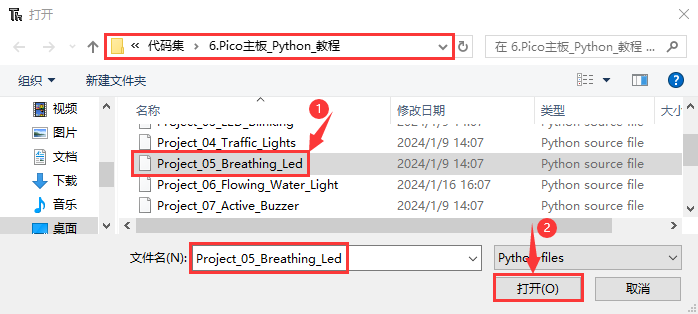
特别注意:本教程中使用的代码保存的路径为:“…\代码集\6.Pico主板_Python_教程”中。
1.打开Thonny软件,并且单击“打开…”。
2.在新弹出的窗口中,点击“此电脑”。
在新的对话框中,选中“Project_05_Breathing_Led.py”,单击“打开”。
#MicroPython实现Raspberry Pi Pico板控制LED实现呼吸灯的程序示例
import time
from machine import Pin,PWM
PWM_PulseWidth=0
#利用外接LED,构建PWM对象PWM LED
pwm_LED=PWM(Pin(16))
#设置LED的PWM频率
pwm_LED.freq(500)
while True:
while PWM_PulseWidth<65535:
PWM_PulseWidth=PWM_PulseWidth+50
time.sleep_ms(1) #延时 1 毫秒
pwm_LED.duty_u16(PWM_PulseWidth)
while PWM_PulseWidth>0:
PWM_PulseWidth=PWM_PulseWidth-50
time.sleep_ms(1)
pwm_LED.duty_u16(PWM_PulseWidth)
6. 项目现象:#
按照接线图正确接好各元器件,利用MicroUSB线连接到计算机上电,单击来执行程序代码。代码开始执行,你会看到的现象是:电路中的LED从暗逐渐变亮,再从亮逐渐变暗,就像呼吸一样。

当在线运行时,单击或按Ctrl+C退出程序。
7. 代码说明:#
代码 |
说明 |
|---|---|
PWM_PulseWidth=0 |
设置PWM初始值为0 |
pwm_LED=PWM(Pin(16)) |
LED的PWM引脚为GPIO16 |
pwm_LED.freq(500) |
设置LED频率为500 |
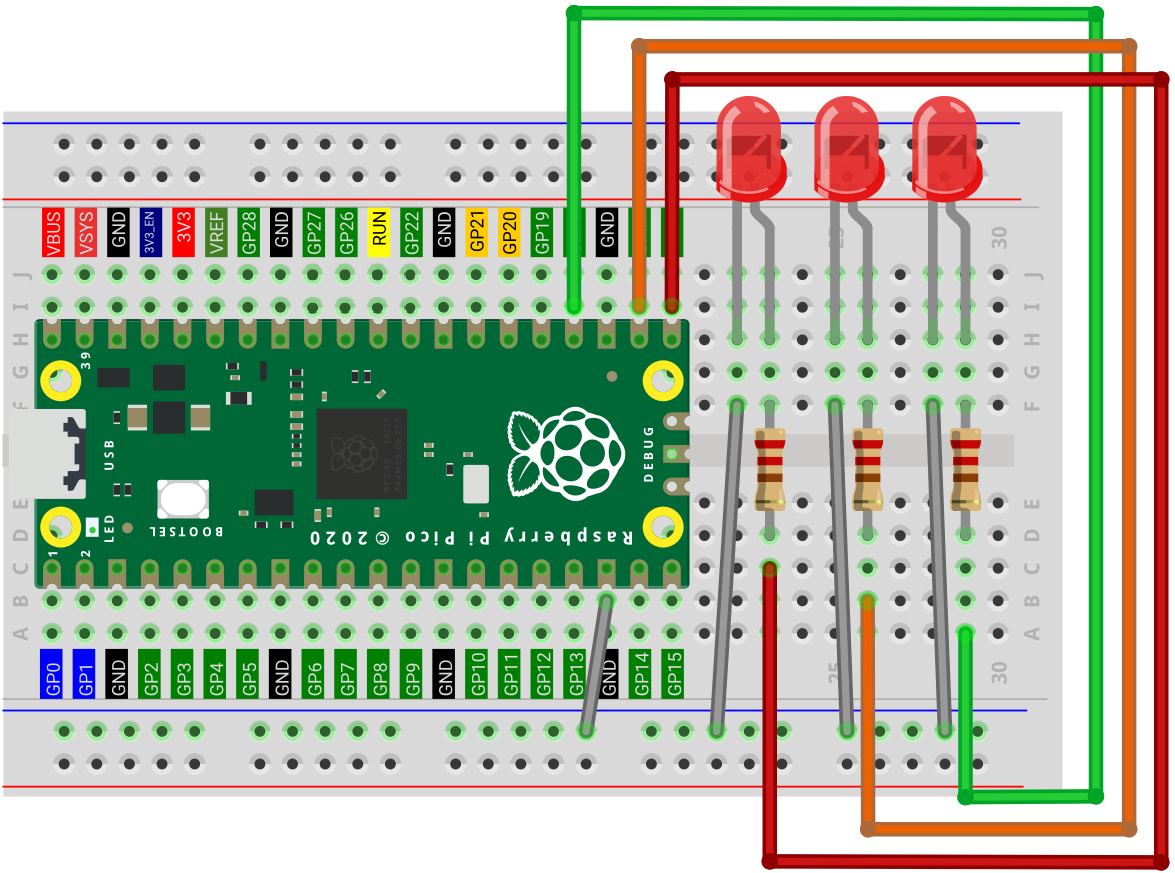
项目06 流水灯#
1. 项目介绍:#
在日常生活中,我们可以看到许多由不同颜色的led组成的广告牌。他们不断地改变灯光(像流水一样)来吸引顾客的注意。在这个项目中,我们将使用树莓派Pico主板控制3个LED灯实现流水的效果。
2. 项目元件:#
|
|
|
|---|---|---|
树莓派Pico主板*1 |
面包板*1 |
红色LED*3 |
|
|
|
220Ω电阻*3 |
面包板连接线若干 |
MicroUSB线*1 |
3. 项目接线图:#
4. 在线运行代码:#
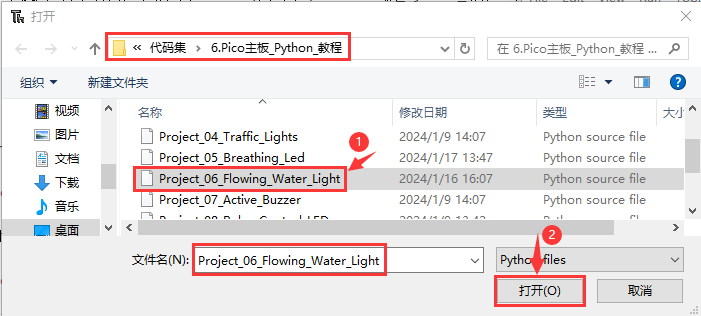
特别注意:本教程中使用的代码保存的路径为:“…\代码集\6.Pico主板_Python_教程”中。
1.打开Thonny软件,并且单击“打开…”。
2.在新弹出的窗口中,点击“此电脑”。
在新的对话框中,选中“Project_06_Flowing_Water_Light.py”,单击“打开”。
from machine import Pin
import time
#使用阵列定义3个连接到LED的GPIO端口,方便操作.
pins = [16, 17, 18]
#使用两个for循环,分别从左到右打开led,然后从右到左返回.
def showLed():
for pin in pins:
print(pin)
led = Pin(pin, Pin.OUT)
led.value(1)
time.sleep_ms(100)
led.value(0)
time.sleep_ms(100)
for pin in reversed(pins):
print(pin)
led = Pin(pin, Pin.OUT)
led.value(1)
time.sleep_ms(100)
led.value(0)
time.sleep_ms(100)
while True:
showLed()
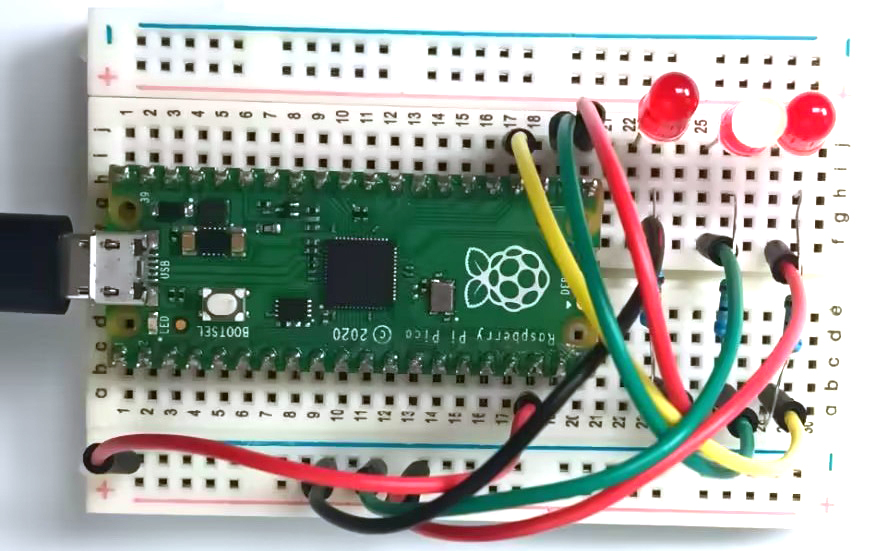
5. 项目现象:#
按照接线图正确接好各元器件,利用MicroUSB线连接到计算机上电,单击来执行程序代码。代码开始执行,你会看到的现象是:电路中的3个LED分别从左到右闪烁,然后从右到左闪烁,循环进行。
当在线运行时,单击或按Ctrl+C退出程序。
6. 代码说明:#
代码 |
说明 |
|---|---|
for pin in pins |
表示变量pin从16开始,每次自加1,到小于19的最大整数,也就是18。即第一次i为16,第二次i为17,第三次i为18,此时跳出for循环,所以for循环下面的语句执行三次,每一次都是led亮0.1秒,灭0.1秒。 |
def showLed(): |
定义一种函数showLed() |
print(pin) |
打印引脚 |
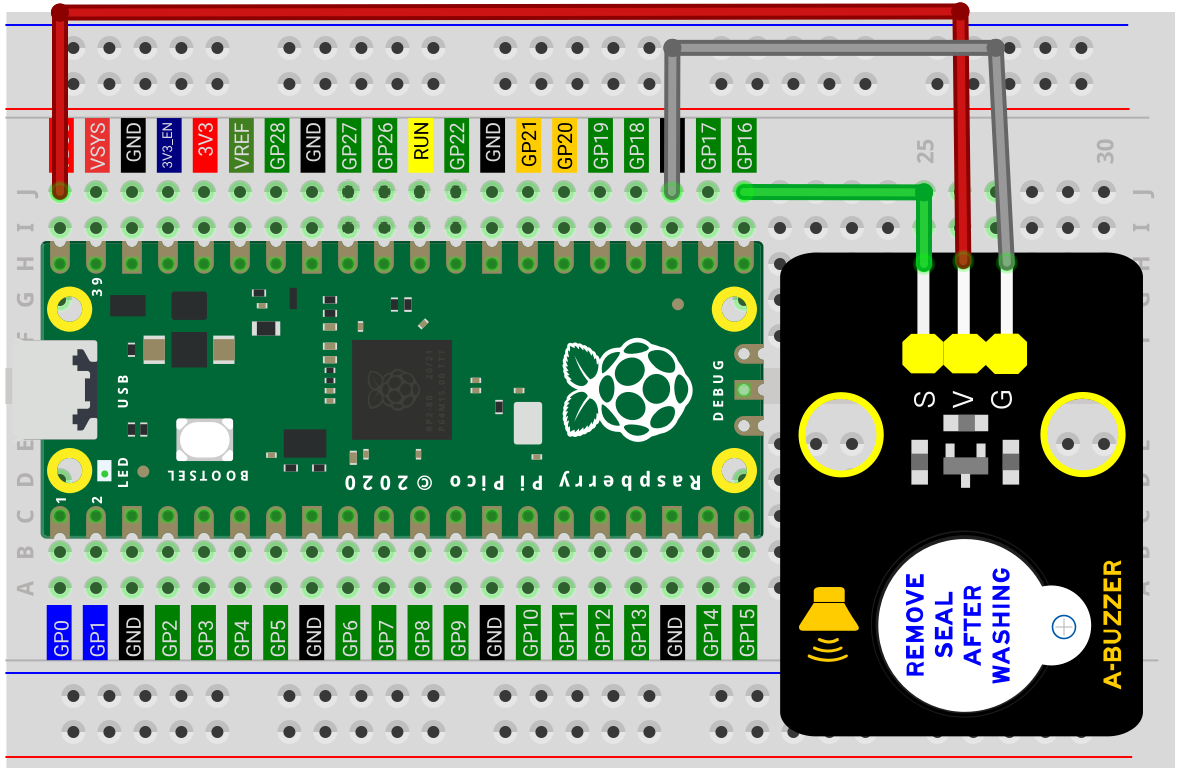
项目07 有源蜂鸣器#
1. 项目介绍:#
有源蜂鸣器模块上有一个发声元件----有源蜂鸣器。它被广泛用作电脑、打印机、报警器、电子玩具、电话、计时器等的发声元件。它有一个内在的振动源,需连接3.3V~5V电源,即可持续发出嗡嗡声。在这个项目中,我们将使用树莓派Pico主板控制有源蜂鸣器发出“滴滴”声。
2. 项目元件:#
|
|
|
|
|
|---|---|---|---|---|
树莓派Pico主板*1 |
面包板*1 |
有源蜂鸣器*1 |
公对母杜邦线若干 |
MicroUSB线*1 |

3. 元件知识:#
注意:本教程使用的是有源蜂鸣器。

有源蜂鸣器和无源蜂鸣器的“源”不是指电源,而是指震荡源。
有源蜂鸣器:内部自带震荡源,所以一触发就能发声,发声频率固定。有源蜂鸣器的优点是程序控制方便,声压高。有源自激型蜂鸣器工作发声原理如下:直流电源输入经过振荡系统的放大和取样电路在谐振装置作用下产生声音信号。
模块参数:
工作电压: DC 3.3 ~ 5V
工作温度:-10°C ~ +50°C
控制信号:数字信号
尺寸:32 mm x 23.8 mm x 12.3 mm
定位孔大小:直径为 4.8 mm
无源蜂鸣器: 内部不带震荡源,如果直接通直流电信号无源蜂鸣器是没有声音的,因为磁路恒定,振动膜片一直处在吸附状态,不能振动发音。根据不同需求,一般我们通过方波去驱动,然后通过更换方波的频率来实现不同音效。
总结:有源蜂鸣器内部带震荡源,发声频率固定。无源内部不带震荡源,通过方波去驱动,发音频率可改变。
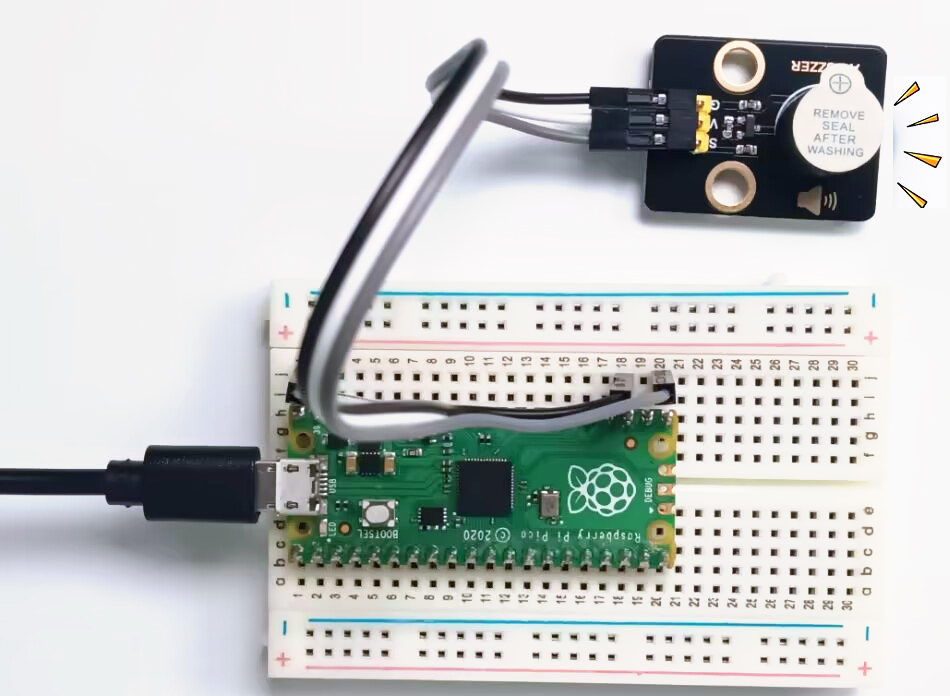
4. 项目接线图:#
5. 在线运行代码:#
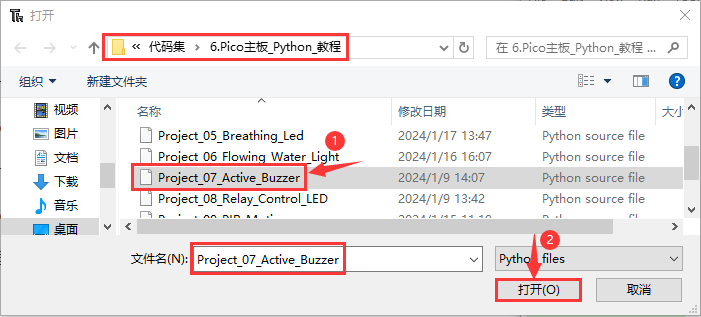
特别注意:本教程中使用的代码保存的路径为:“…\代码集\6.Pico主板_Python_教程”中。
1.打开Thonny软件,并且单击“打开…”。
2.在新弹出的窗口中,点击“此电脑”。
在新的对话框中,选中“Project_07_Active_Buzzer.py”,单击“打开”。
from machine import Pin
import time
buzzer = Pin(16, Pin.OUT) # 从引脚GPIO16创建蜂鸣器对象,设置引脚GPIO16为输出模式
try:
while True:
buzzer.value(1) # 设置蜂鸣器开启
time.sleep(0.5) # 延时 0.5秒
buzzer.value(0) # 设置蜂鸣器关闭
time.sleep(0.5) # 延时 0.5秒
except:
pass
6. 项目现象:#
按照接线图正确接好模块,利用MicroUSB线连接到计算机上电,单击来执行程序代码。代码开始执行,你会看到的现象是:有源蜂鸣器发出“滴滴”声。
当在线运行时,单击或按Ctrl+C退出程序。
7. 代码说明:#
可以参照项目03的代码说明,这里就不多做介绍了。
项目08 继电器控制LED#
1. 项目介绍:#
在日常生活中,我们一般使用交流来驱动电气设备,有时我们会用开关来控制电器。如果将开关直接连接到交流电路上,一旦发生漏电,人就有危险。从安全的角度考虑,我们特别设计了这款具有NO(常开)端和NC(常闭)端的继电器模块。在这节课我们将学习一个比较特殊、好用的开关,就是继电器模块,使用继电器模块控制LED灯亮灭。
2. 项目元件:#
|
|
|
|
|
|---|---|---|---|---|
树莓派Pico主板*1 |
面包板*1 |
继电器模块*1 |
红色LED*1 |
一字螺丝刀*1 |
|
|
|
|
|
公对母杜邦线若干 |
MicroUSB线*1 |
220Ω电阻*1 |
面包板连接线若干 |

3. 元件知识:#

继电器: 继电器能兼容多种单片机控制板,是用小电流去控制大电流运作的一种“自动开关”。它可以让单片机控制板驱动3A以下负载,如LED灯带、直流马达、微型水泵、电磁阀可插拔式接口设计,方便使用。继电器有3个接线柱用于外接电路,分别为NO、COM和NC端(背后丝印)。

模块参数:
工作电压: DC 5V
工作电流: 50 mA
最大功率: 0.25 W
控制信号: 数字信号
触电电流: 小于 3 A
工作温度:-10°C ~ +50°C
尺寸:47.6mm x 23.8mm x 19mm
定位孔大小:直径为4.8mm
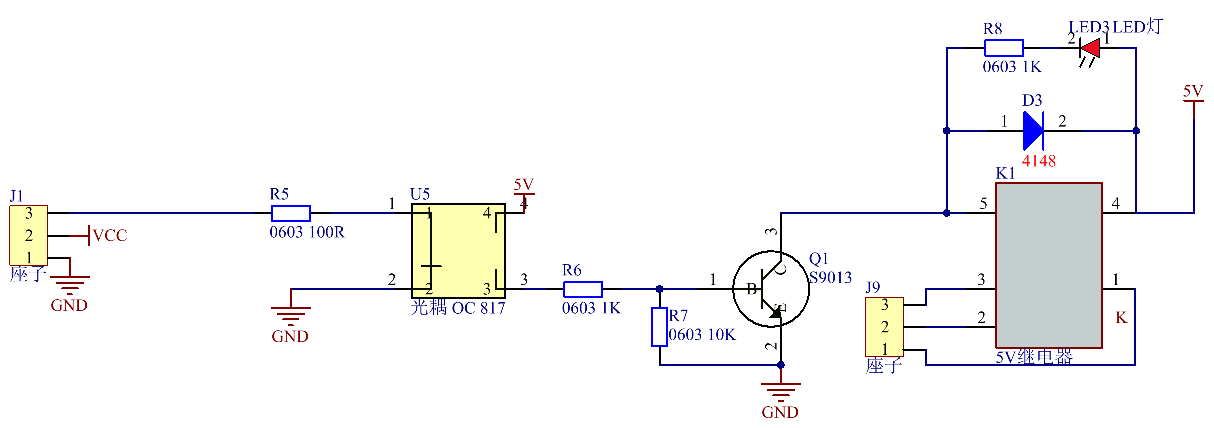
模块原理图:
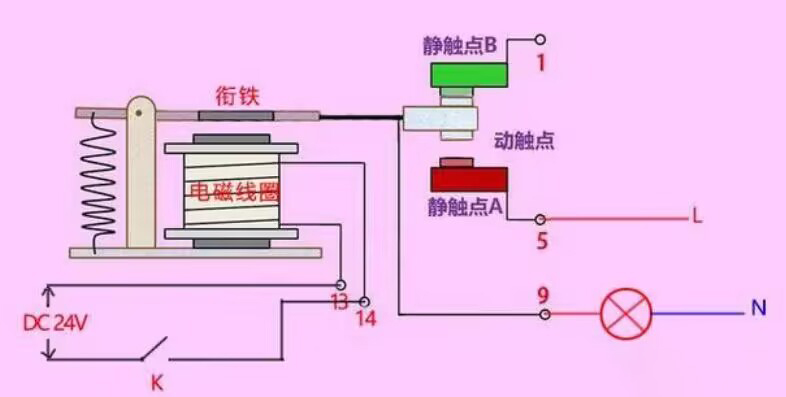
一个继电器拥有一个动触点以及两个静触点A和B。
当开关K断开时,继电器线路无电流通过,此时动触点与静触点B相接触,上半部分的电路导通。静触点B被称为常闭触点(NC)。常闭——NC(normal close)通常情况下是关合状态,即线圈未得电的情况下闭合的。
当开关K闭合时,继电器电路通过电流产生磁力,此时动触点与静触点A相接触,下半部分电路导通。静触点A被称为常开触点(NO)。常开——NO(normal open)通常情况下是断开状态,即线圈未得电的情况下断开的。
而动触点也被称为公共触点(COM)。
继电器简单来说就是一个开关,VCC表示电源正极、GND表示电源负极、IN表示信号输入脚,COM表示公共端,NC(normal close)表示常闭端,NO(normal open)表示常开端。
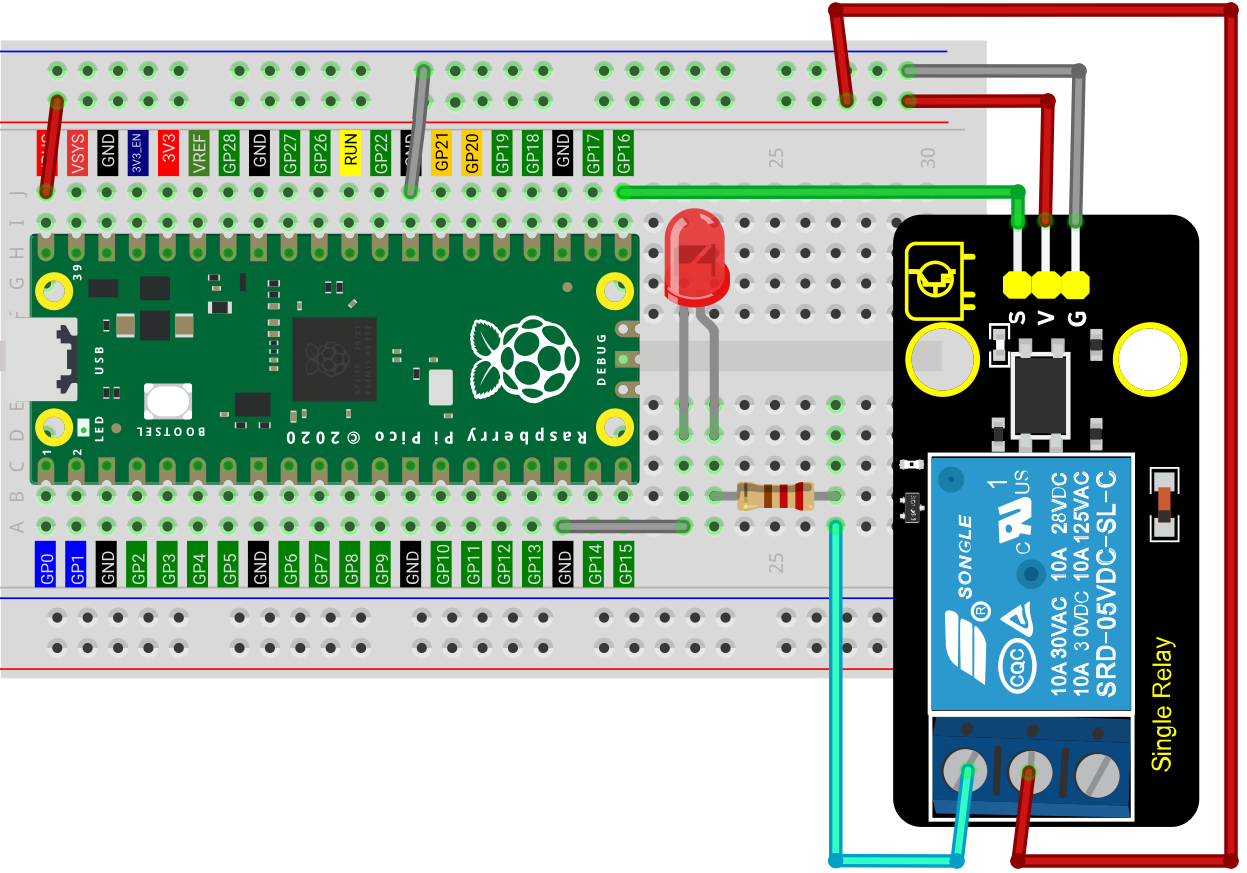
4. 项目接线图:#
**特别注意:** 接线前,需要用一字螺丝刀将继电器模块的NO端口和COM端口处的螺丝扭松,将面包板连接线的一端插入NO端口和COM端口处;接好线后,再用一字螺丝刀将NO端口和COM端口处的螺丝扭紧。
5. 在线运行代码:#
特别注意:本教程中使用的代码保存的路径为:“…\代码集\6.Pico主板_Python_教程”中。
1.打开Thonny软件,并且单击“打开…”。
2.在新弹出的窗口中,点击“此电脑”。
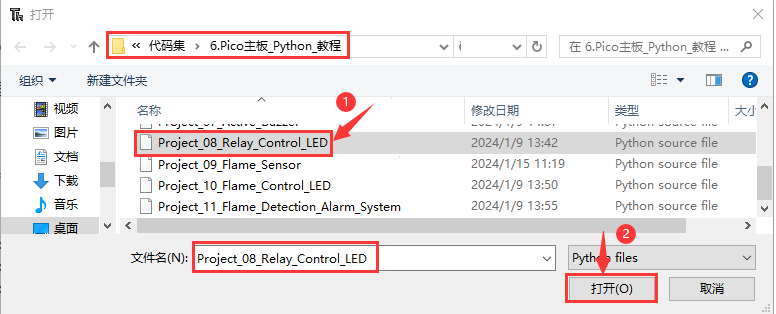
在新的对话框中,选中“Project_08_Relay_Control_LED.py”,单击“打开”。
from machine import Pin
import time
# 从引脚GPIO16创建继电器,设置引脚GPIO16为输出模式
relay = Pin(16, Pin.OUT)
# 继电器断开,继电器上COM、NO连接,COM、NC断开.
def relay_on():
relay(1)
# 继电器闭合,继电器上的COM和NO断开,COM和NC连接.
def relay_off():
relay(0)
# 循环,继电器开启1秒,关闭1秒
while True:
relay_on()
time.sleep(1)
relay_off()
time.sleep(1)
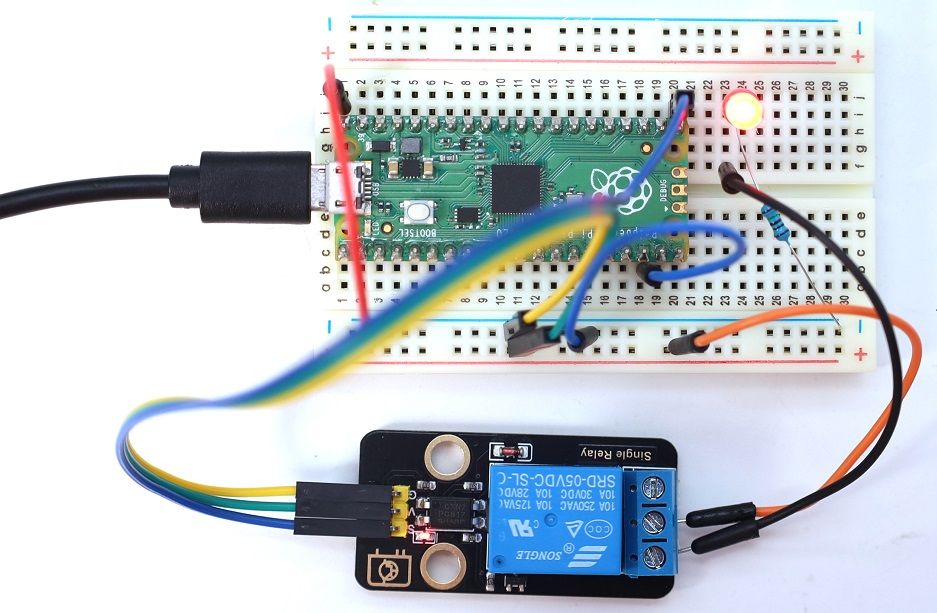
6. 项目现象:#
按照接线图正确接好模块和各元器件,利用MicroUSB线连接到计算机上电,单击来执行程序代码。代码开始执行,你会看到的现象是:继电器将循环开与关,开启1秒LED点亮1秒,关闭1秒LED熄灭1秒。同时可以听到继电器开与关的声音,还可以看到继电器上的指示灯指示状态的变化。
当在线运行时,单击或按Ctrl+C退出程序。
7. 代码说明:#
可以参照项目03和项目06的代码说明,这里就不多做介绍了。
项目09 火焰传感器#
1. 项目介绍:#
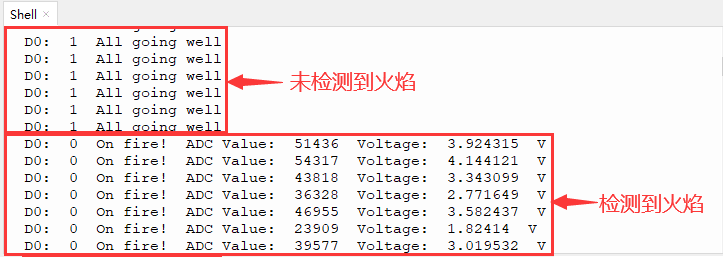
火焰传感器模块有两个信号输出端,分别可输出数字信号与模拟信号。在本项目中,我们分别读取传感器的数字信号、ADC值和电压值,并将测试结果在Shell窗口中打印显示出来。
2. 项目元件:#
|
|
|
|
|
|---|---|---|---|---|
树莓派Pico主板*1 |
面包板*1 |
火焰感器模块*1 |
公对母杜邦线若干 |
MicroUSB线*1 |
3. 元件知识:#

火焰传感器: 它对火焰光谱特别灵敏,且灵敏度可调。性能稳定,是救火机器人的必备部件。火焰传感器上有一个远红外火焰探头,起着非常重要的作用,它可以用作机器人的眼睛来寻找火源或足球。利用它可以制作灭火机器人、足球机器人等。
模块参数:
工作电压: DC 3.3 ~ 5V
工作电流: 1.2MA
最大功率: 0.006W
感应距离: 0~60mm
输出信号:模拟信号和数字信号
工作温度:-10°C ~ +50°C
尺寸:32 mm x 23.8 mm x 9.2 mm
定位孔大小:直径为 4.8 mm
模块原理图:
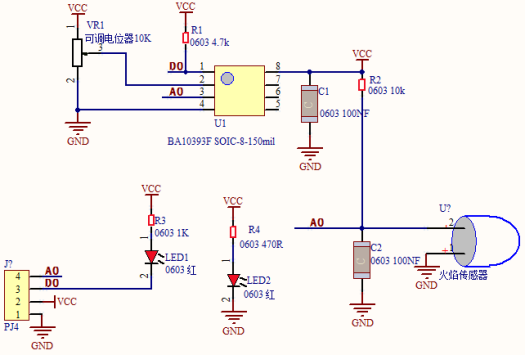
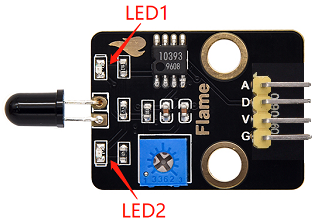
红外火焰传感器能够探测到波长在700纳米~1000纳米范围内的红外光,探测角度为60,其中红外光波长在880纳米附近时,其灵敏度达到最大。从电路原理图我们可以看到,上电后红色LED2先点亮,红色LED1处于熄灭状态,检测到火焰时,数字信号端D0输出低电平,红色LED1将点亮。红外火焰探头将外界红外光的强弱变化转化为电流的变化,通过A/D转换器反映为0~255范围内数值的变化。外界红外光越强,数值越小;红外光越弱,数值越大。
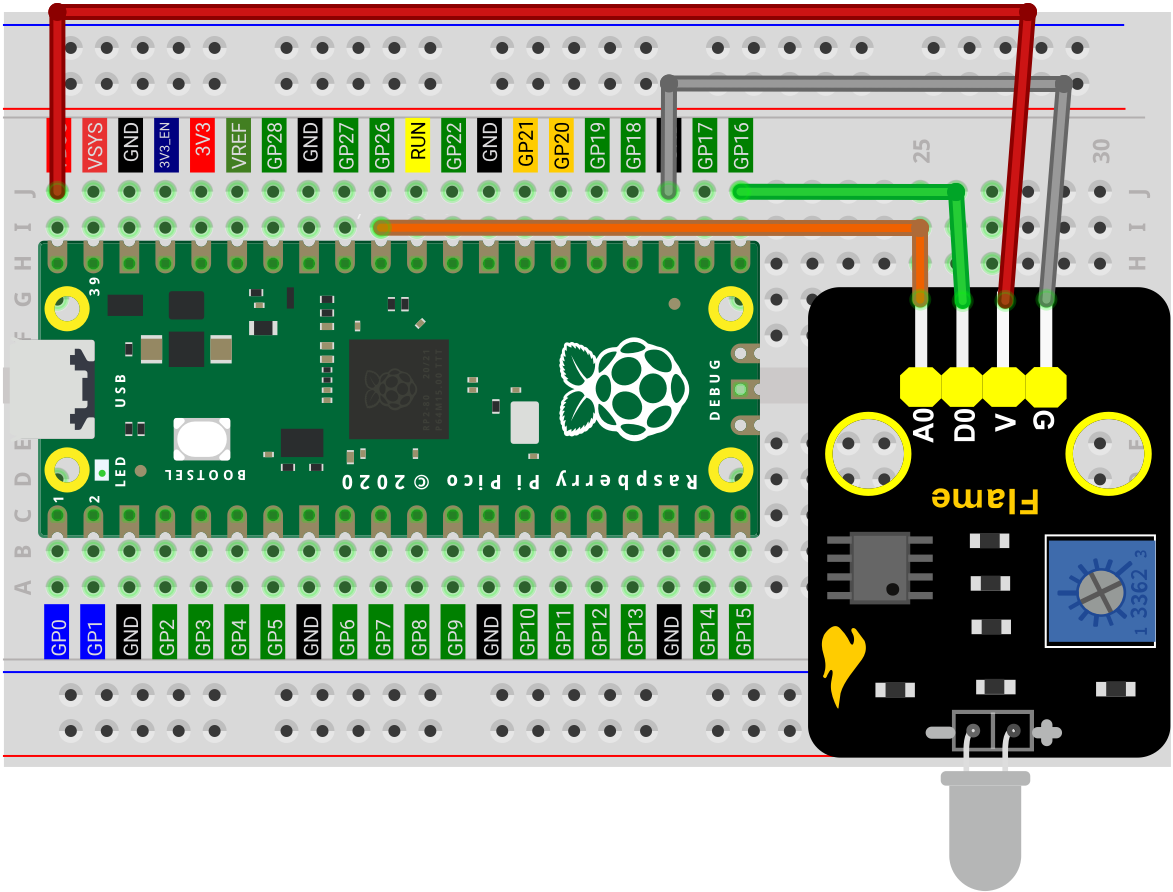
4. 项目接线图:#
5. 在线运行代码:#
特别注意:本教程中使用的代码保存的路径为:“…\代码集\6.Pico主板_Python_教程”中。
1.打开Thonny软件,并且单击“打开…”。
2.在新弹出的窗口中,点击“此电脑”。
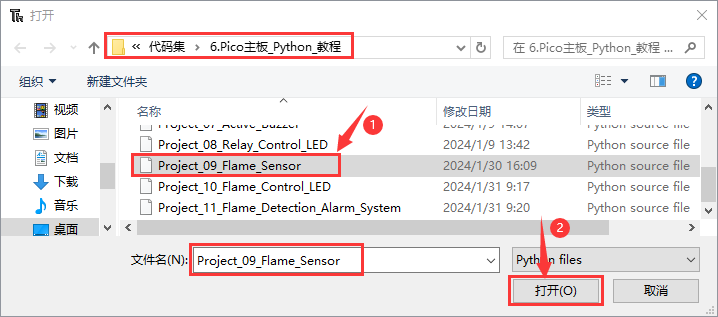
在新的对话框中,选中“Project_09_Flame_Sensor.py”,单击“打开”。
from machine import Pin
import machine
import time
PIN_ANALOG_IN = machine.ADC(26)
PIN_DIGITAL_IN = Pin(16, Pin.IN)
while True:
adcvalue1 = PIN_ANALOG_IN.read_u16()
voltage = adcvalue1 / 65535.0 * 5.0
value2 = PIN_DIGITAL_IN.value()
print("D0: ", end = " ")
print(value2, end = " ")
if value2 == 0:
print(" On fire!", end = " ")
print(" ADC Value: ", adcvalue1, " Voltage: ", voltage, " V")
else:
print(" All going well")
time.sleep(0.1)
6. 项目现象:#
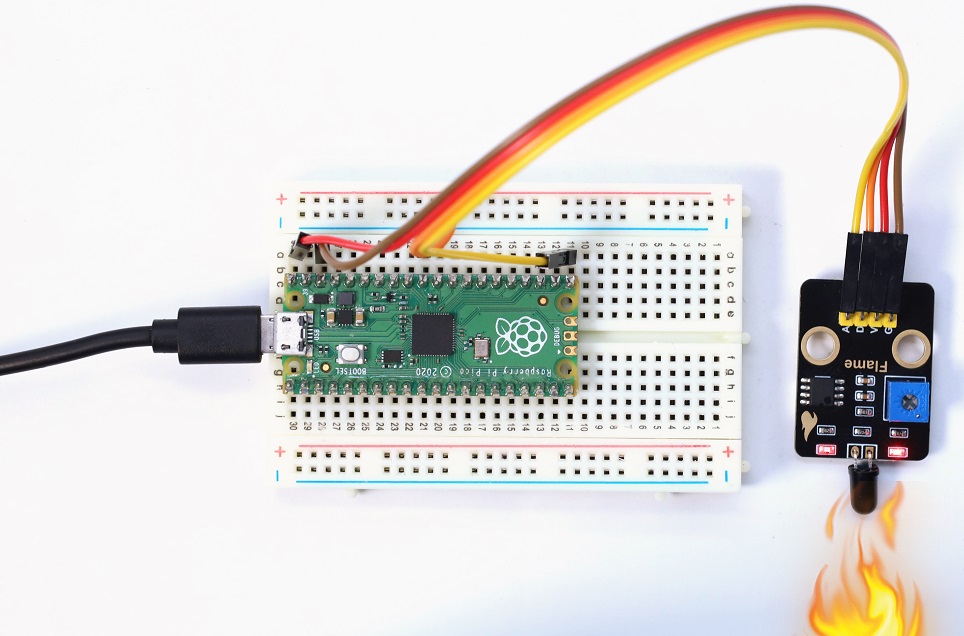
按照接线图正确接好模块,利用MicroUSB线连接到计算机上电,利用MicroUSB线连接到计算机上电,此时火焰传感器上的红色LED2点亮。旋转火焰传感器上的电位器,微调使传感器上红色LED1灯介于亮与不亮之间的不亮状态。如下图所示。
单击来执行程序代码。代码开始执行,你会看到的现象是:Shell窗口中打印出火焰传感器的D0值“1”和字符串“All going well”。当传感器检测到火焰时,红色LED1点亮,可以看到D0值由“1”变为“0”,字符串“All going well”变为“on fire!”,还打印出ADC值和电压值,同时传感器检测到的火焰越大,ADC值和电压值反而越小。
当在线运行时,单击或按Ctrl+C退出程序。
7. 代码说明:#
代码 |
说明 |
|---|---|
PIN_DIGITAL_IN = Pin(16, Pin.IN) |
定义火焰传感器模块的数字管脚为GPIO16,设置为“Pin.IN”模式而不使用输入上拉,此时引脚处于高阻抗状态,会导致不可预测的电平结果。为了确保开关断开时的读数正确,推荐使用上拉或下拉电阻。但是,火焰传感器模块已经使用上拉电阻R1和R2,可以不设置输入上拉,该电阻的目的是在开关断开时将引脚拉至已知状态。通常选择一个4.7KΩ/10KΩ的电阻,因为它的阻值足够低,可以可靠地防止输入悬空,同时,该阻值也要足够高,以使开关闭合时不会消耗太多电流。如果使用下拉电阻,则当开关断开时,输入引脚将为低电平;当开关闭合时,输入引脚将为高电平。如果使用上拉电阻,则当开关断开时,输入引脚将为高电平;当开关闭合时,输入引脚将为低电平。 |
PIN_ANALOG_IN = machine.ADC(26) |
火焰传感器模块的模拟管脚为GPIO26,也是0通道即ADC(0)。 |
.read_u16() |
读取火焰传感器的ADC值,范围为0~65535,那么PIN_ANALOG_IN.read_u16()即读取ADC(26)引脚输入的ADC值,然后赋给名为adcvalue1的变量 |
PIN_DIGITAL_IN.value() |
读取火焰传感器的数字电平,函数返回高(HIGH)或者低(LOW)。 |
if… else:… |
当if后面的逻辑判断为True时,执行if下缩进的代码;否则执行else下缩进的代码。python代码是严格使用缩进的。 |
项目10 火焰传感器控制LED#
1. 项目介绍:#
上一项目中我们已经学习了火焰传感器的工作原理,这一项目中我们将火焰传感器和LED灯组合实验,实现火焰传感器检测到火焰时LED快速闪烁的效果。
2. 项目元件:#
|
|
|
|
|---|---|---|---|
树莓派Pico主板*1 |
面包板*1 |
火焰传感器模块*1 |
红色LED*1 |
|
|
|
|
公对母杜邦线若干 |
MicroUSB线*1 |
220Ω电阻*1 |
面包板连接线若干 |
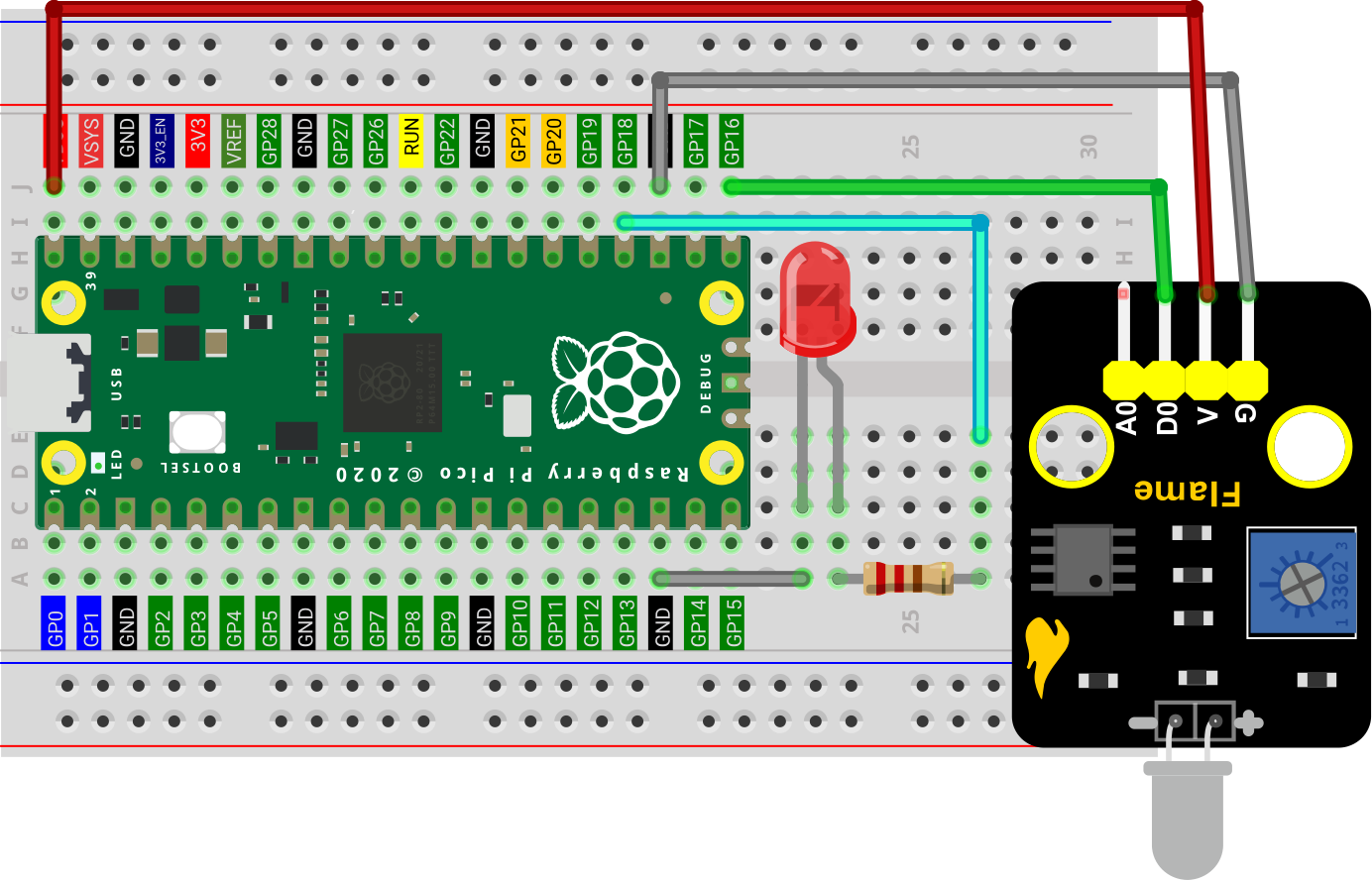
3. 项目接线图:#
4. 在线运行代码:#
特别注意:本教程中使用的代码保存的路径为:“…\代码集\6.Pico主板_Python_教程”中。
1.打开Thonny软件,并且单击“打开…”。
2.在新弹出的窗口中,点击“此电脑”。
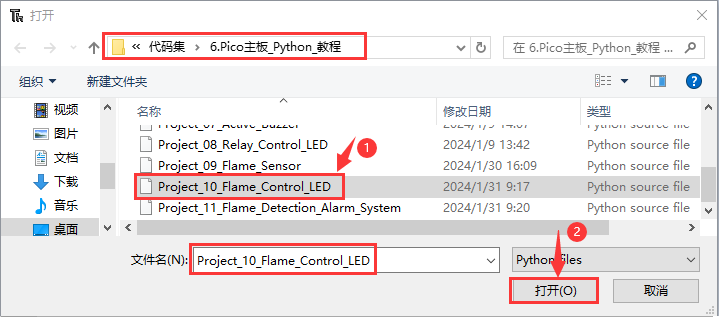
在新的对话框中,选中“Project_10_Flame_Control_LED.py”,单击“打开”。
#导入引脚和时间模块
from machine import Pin
import time
# 定义火焰传感器,led的引脚
sensor_flame = machine.Pin(16, machine.Pin.IN)
led = machine.Pin(18, machine.Pin.OUT)
while True:
value = sensor_flame.value()
if value == 0:
print("ALARM! Fire detected!")
led.value(1)
time.sleep(0.2)
led.value(0)
time.sleep(0.2)
else:
led.value(0)
5. 项目现象:#
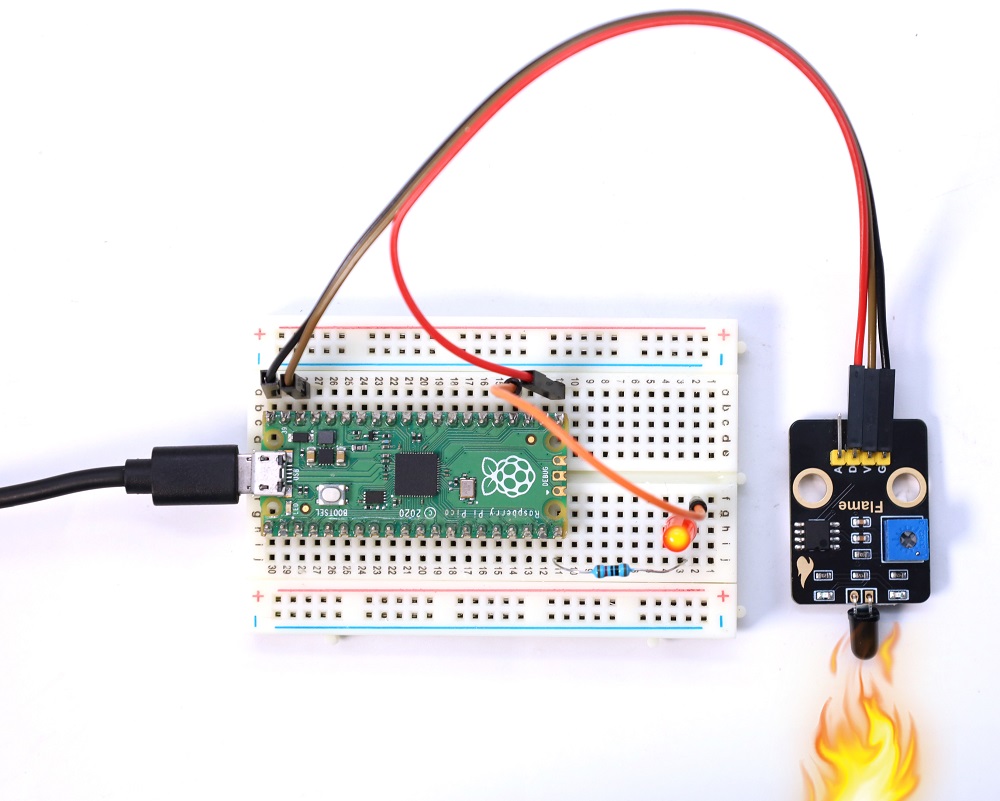
按照接线图正确接好模块和各元器件,利用MicroUSB线连接到计算机上电,单击来执行程序代码。代码开始执行,你会看到的现象是:当火焰传感器检测到火焰时,LED灯快速闪烁,同时Shell窗口中显示“ALARM! Fire detected!”。
当在线运行时,单击或按Ctrl+C退出程序。
6. 代码说明:#
可以参照项目09和项目03的代码说明,这里就不多做介绍了。
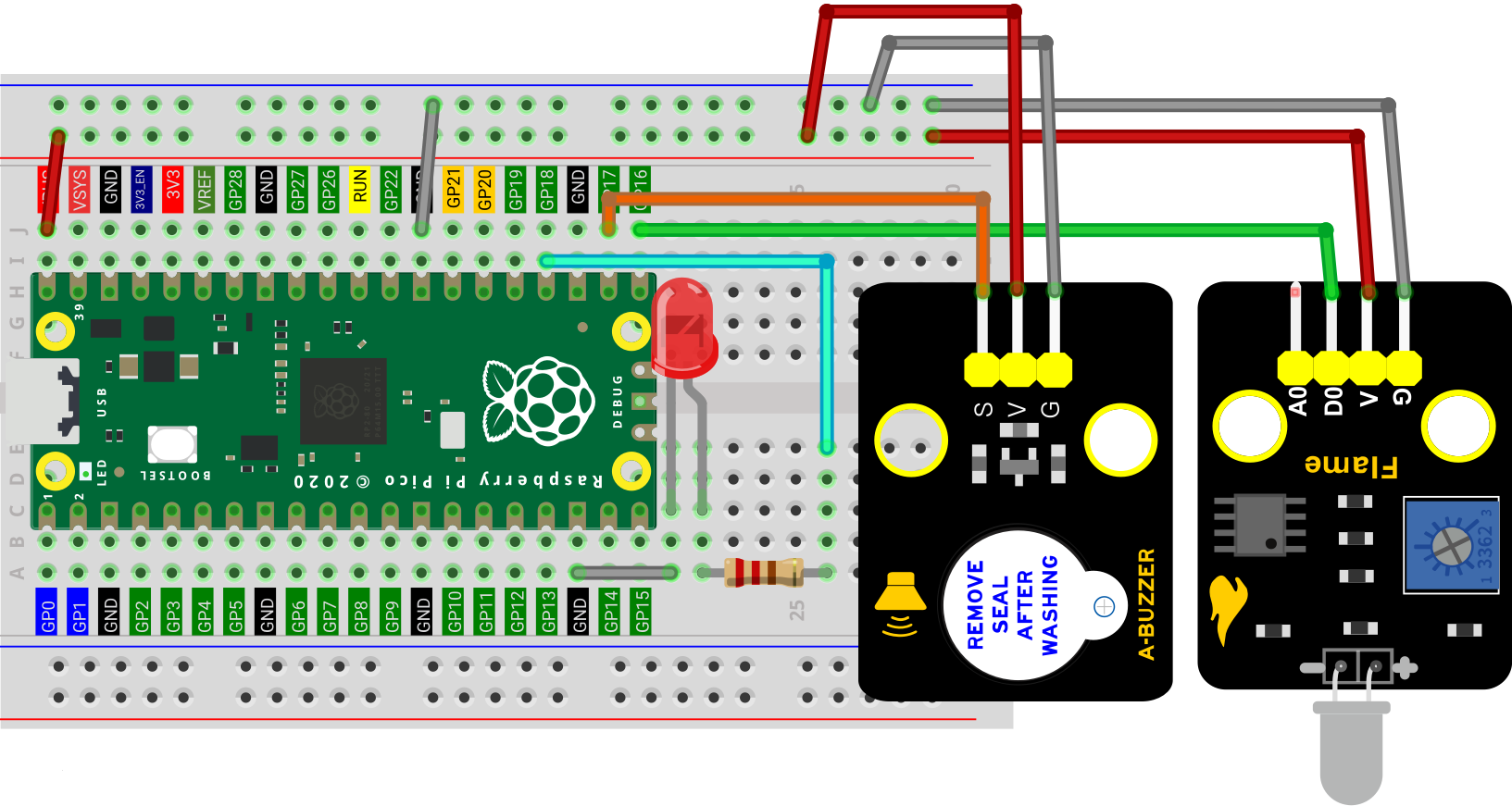
项目11 火焰检测报警系统#
1. 项目介绍:#
前面的项目中我们已经学习了火焰传感器的工作原理和火焰传感器控制LED灯快速闪烁的效果。那么,在本项目中,我们将结合火焰传感器、有源蜂鸣器和LED灯来模拟火焰检测报警系统。
2. 项目元件:#
|
|
|
|
|
|---|---|---|---|---|
树莓派Pico主板*1 |
面包板*1 |
火焰传感器模块*1 |
有源蜂鸣器模块*1 |
红色LED*1 |
|
|
|
|
|
公对母杜邦线若干 |
MicroUSB线*1 |
220Ω电阻*1 |
面包板连接线若干 |
3. 项目接线图:#
4. 在线运行代码:#
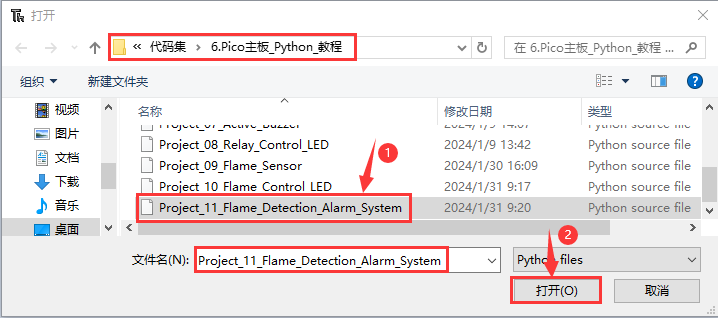
特别注意:本教程中使用的代码保存的路径为:“…\代码集\6.Pico主板_Python_教程”中。
1.打开Thonny软件,并且单击“打开…”。
2.在新弹出的窗口中,点击“此电脑”。
在新的对话框中,选中“Project_11_Flame_Detection_Alarm_System.py”,单击“打开”。
#导入引脚和时间模块
from machine import Pin
import time
# 定义火焰传感器,led和有源蜂鸣器的引脚
sensor_flame = machine.Pin(16, machine.Pin.IN)
buzzer = machine.Pin(17, machine.Pin.OUT)
led = machine.Pin(18, machine.Pin.OUT)
while True:
value = sensor_flame.value()
if value == 0:
print("ALARM! Fire detected!")
buzzer.value(1)
led.value(1)
time.sleep(0.2)
buzzer.value(0)
led.value(0)
time.sleep(0.2)
else:
buzzer.value(0)
led.value(0)
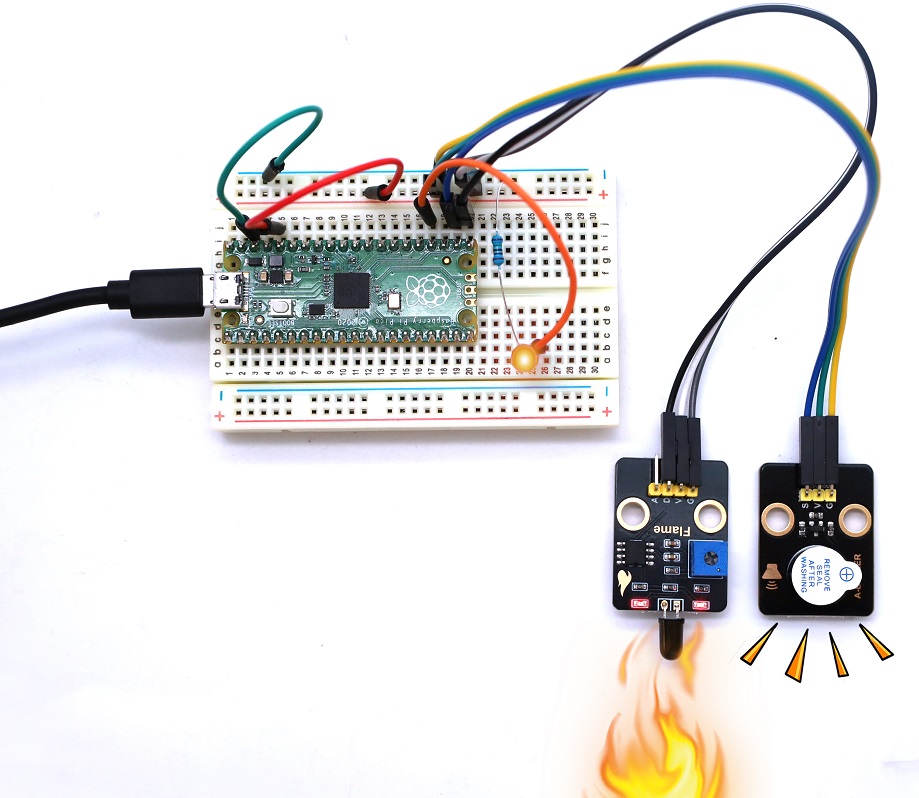
5. 项目现象:#
按照接线图正确接好模块和各元器件,利用MicroUSB线连接到计算机上电,单击来执行程序代码。代码开始执行,你会看到的现象是:当火焰传感器检测到火焰时,有源蜂鸣器发出警报,LED灯快速闪烁,同时Shell窗口中显示“ALARM! Fire detected!”。
当在线运行时,单击或按Ctrl+C退出程序。
6. 代码说明:#
可以参照项目09和项目03的代码说明,这里就不多做介绍了。