实验四 避障传感器检测障碍物#

实验说明
在这个套件中,有一个Keyes DIY电子积木 避障传感器,它主要采用一对红外线发射与接收管元件。实验中,我们通过读取传感器上S端高低电平,判断是否存在障碍物;并且,我们在串口监视器上显示测试结果。
实验原理
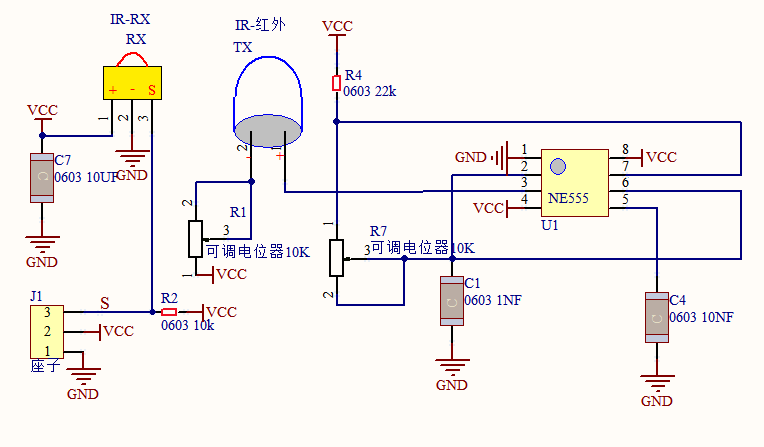
原理就是发射管TX发射出一定频率的红外信号,红外信号会随着传送距离的加大逐渐衰减,如果遇到障碍物,就会形成红外反射。当检测方向RX遇到反射回来的信号比较弱时,接收检测引脚输出高电平,说明障碍物比较远;当反射回来的信号比较强,接收检测引脚输出低电平,说明障碍物比较近了,接收检测引脚输出低电平,此时指示灯亮起。传感器上有两个电位器,一个用于调节发送功率,一个用于调节接收频率,通过调节2个电位器,我们可以调节它的有效距离。
实验器材
|
|
|
|
|
|---|---|---|---|---|
Raspberry Pi Pico板*1 |
Raspberry Pi Pico扩展板*1 |
keyes DIY电子积木 避障传感器*1 |
防反插3Pin*1 |
MicroUSB线*1 |




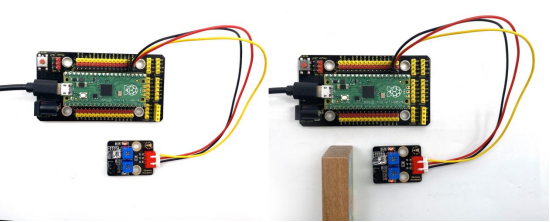
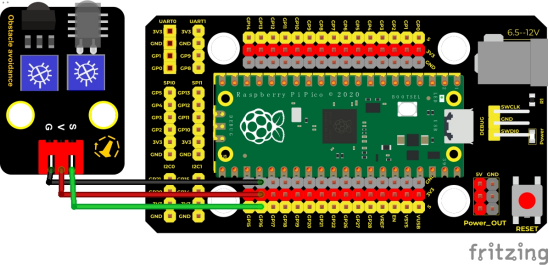
接线图
测试代码
/*
* Keyes Starter Kit for Raspberry Pi Pico
* lesson 4
* obstacle avoidance sensor
*/
int val = 0;
void setup() {
Serial.begin(9600);//设置波特率为9600
pinMode(16, INPUT);//设置引脚GP16为输入模式
}
void loop() {
val = digitalRead(16);//读取数字电平
Serial.print(val);//打印读取的电平信号
if (val == 0) {//检测到障碍物
Serial.print(" ");
Serial.println("There are obstacles");
delay(100);
}
else {//没检测到障碍物
Serial.print(" ");
Serial.println("All going well");
delay(100);
}
}
代码说明
我们这里只使用一款传感器,所以没有定义管脚名称变量了,直接使用引脚“16”,其它设置方法和实验三类似,这里就不多做介绍了。
特别注意
烧录好测试代码,按照接线图连接好线,上电后,我们开始调节两个电位器调节感应距
离。
1.调节发射功率调节电位器,先将电位器顺时针到尽头,然后回调一些,使传感器上
P LED介于不亮与亮之间的零界点。
2.调节接收频率调节电位器,顺时针调节时,频率增大。调节使它产生38KHz频率的方波,调节时,也观察传感器上S LED,使它介于不亮与亮之间的零界点。
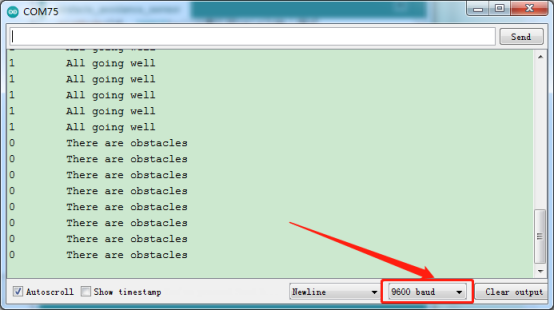
测试结果
上传测试代码成功,利用USB线上电后,打开串口监视器,设置波特率为9600。串口监视器显示对应数据和字符。实验中,当传感器检测到障碍物时,val为0,串口监视器显示“There are obstacles”字符;没有检测到障碍物时,val为1,串口监视器显示“All going well”字符,如下图。