实验十六 摇杆模块#

实验说明
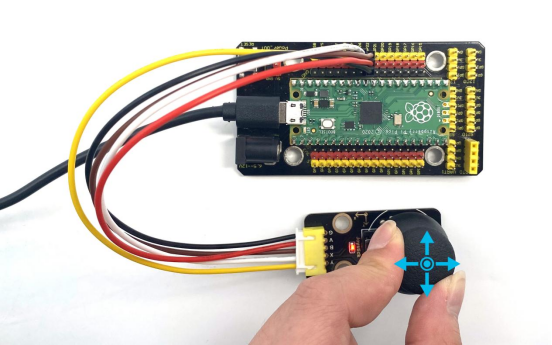
大家都应该看过游戏手柄,有些游戏手柄上除了按键,还有摇杆,那摇杆是什么工作原理呢?那么在我们这个套件中,就有一个Keyes DIY电子积木 摇杆模块,它主要采用PS2手柄摇杆元件。控制时,我们需要将模块X Y端口连接单片机模拟口,B端口连接单片机数字口,VCC接单片机电源输出端(3.3-5V),GND接单片机GND。我们可以读取两个模拟值和一个数字口)的高低电平情况,判断模块上摇杆的工作状态。
实验中,我们将读取两个模拟值(X轴Y轴)和一个数字值(Z轴,并在shell显示测试结果。
实验原理
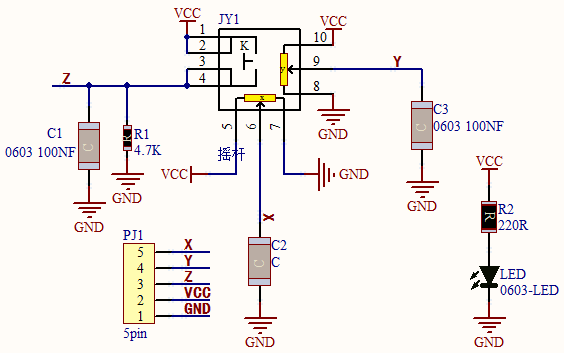
其实它的原理非常简单,内部相当于两个可调电位器(左右和上下)和一个按键,这个按键没被按下时被R1下拉为低电平,按下时接通VCC即为高电平,与我们前面学习过的按键模块是相反的,我们摇动摇杆时内部的电位器就会调节从而输出不同的电压,我们就可以读取到模拟值。
实验器材
|
|
|
|
|
|---|---|---|---|---|
Raspberry Pi Pico板*1 |
Raspberry Pi Pico扩展板*1 |
keyes DIY电子积木 摇杆模块*1 |
防反插5Pin*1 |
MicroUSB线*1 |





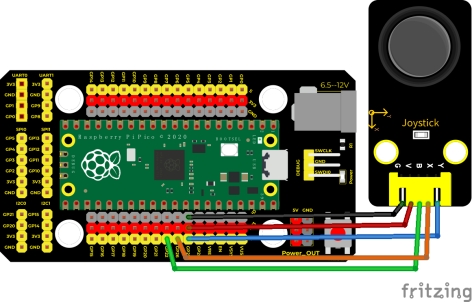
接线图
测试代码
/*
* Keyes Starter Kit for Raspberry Pi Pico
* lesson 16
* Joystick
*/
int X = 0;
int Y = 0;
int Button = 0;
void setup() {
Serial.begin(9600);
pinMode(22, INPUT); //定义遥感按钮的PIN为GP22
}
void loop() {
X = analogRead(26); //遥感的X轴引脚接ADC0
Y = analogRead(27); //遥感的Y轴引脚接ADC1
Button = digitalRead(22); //读取按钮的状态,并在下方打印出来
Serial.write("X:");
Serial.print(X);
Serial.write(" Y:");
Serial.print(Y);
Serial.write(" B:");
Serial.println(Button);
delay(100);
}
代码说明
在实验中,根据接线,x管脚设置为GP26,y管脚设置为GP27,摇杆按钮管脚设置为GP22,串口监视器显示测试数据,显示前需设置波特率(我们默认设置为9600,可更改)。
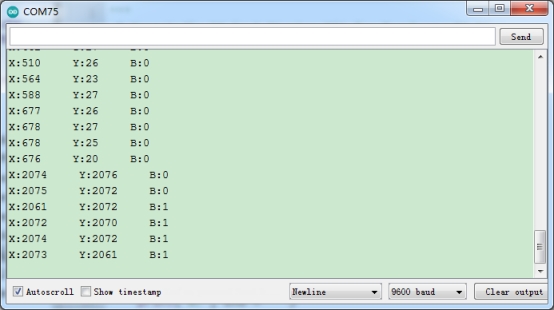
测试结果
上传测试代码成功,利用USB线上电后,打开串口监视器,设置波特率为9600。串口监视器显示对应数值。摇动摇杆,x轴和y轴对应的模拟值发生改变,按下按钮,读取到的数字值为1,否则为0,如下图。