实验十八 旋转编码器模块计数#
实验说明
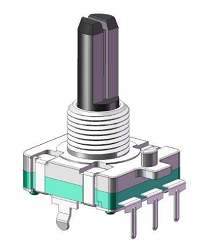
在这个套件中,有一个Keyes DIY电子积木 旋转编码器模块,也叫开关编码器、旋转编码器。此款编码器有做20脉冲20定位点、15脉冲30定位点两种。编码器主要用于汽车电子、多媒体音响、仪器仪表、家用电器、智能家居、计算机周边、医疗器械等领域。主要用于频率调节、亮度调节、温度调节、音量调节的参数控制等。
实验中,我们利用Keyes DIY电子积木 旋转编码器模块用于计数,当我们顺时针旋转编码器时,设置数据减1;逆时针旋转编码器时,设置数据加1;按下编码器中间按键时,打印编码器的值;将测试结果在串口监视器上显示。
实验原理
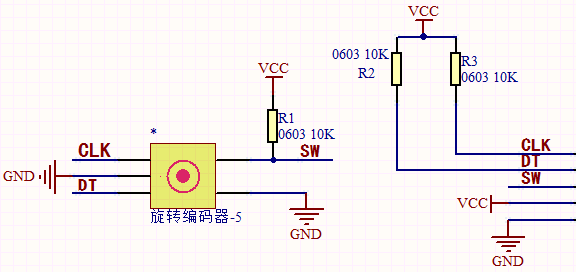
增量式编码器是将位移转换成周期性的电信号,再把这个电信号转变成计数脉冲,用脉冲的个数表明位移的巨细。
这个模块主要采用20脉冲旋转编码器元件。它可通过旋转计数正方向和反方向转动过程中输出脉冲的次数,这种转动计数是没有限制的,复位到初始状态,即从0开始计数。
实验器材
|
|
|
|
|
|---|---|---|---|---|
Raspberry Pi Pico板*1 |
Raspberry Pi Pico扩展板*1 |
keyes DIY电子积木 旋转编码器模块*1 |
防反插5Pin*1 |
MicroUSB线*1 |





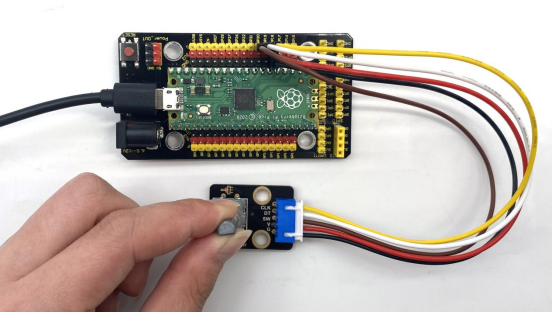
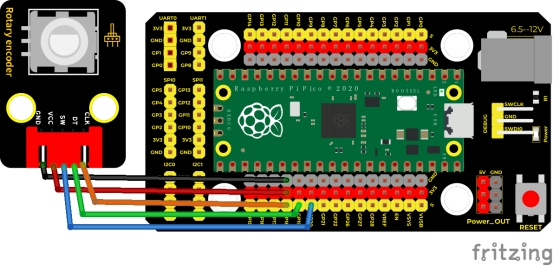
接线图
测试代码
/*
Keyes Starter Kit for Raspberry Pi Pico
lesson 18
Encoder
*/
//Interfacing Rotary Encoder with Arduino
//Encoder Switch -> pin 20
//Encoder DT -> pin 19
//Encoder CLK -> pin 18
int Encoder_DT = 19;
int Encoder_CLK = 18;
int Encoder_Switch = 20;
int Previous_Output;
int Encoder_Count;
void setup() {
Serial.begin(9600);
//pin Mode declaration
pinMode (Encoder_DT, INPUT);
pinMode (Encoder_CLK, INPUT);
pinMode (Encoder_Switch, INPUT);
Previous_Output = digitalRead(Encoder_DT); //Read the inital value of Output A
}
void loop() {
//aVal = digitalRead(pinA);
if (digitalRead(Encoder_DT) != Previous_Output)
{
if (digitalRead(Encoder_CLK) != Previous_Output)
{
Encoder_Count ++;
Serial.println(Encoder_Count);
}
else
{
Encoder_Count--;
Serial.println(Encoder_Count);
}
}
Previous_Output = digitalRead(Encoder_DT);
if (digitalRead(Encoder_Switch) == 0)
{
delay(5);
if (digitalRead(Encoder_Switch) == 0) {
Serial.println("Switch pressed");
while (digitalRead(Encoder_Switch) == 0);
}
}
}
代码说明
1.我们把CLK设置为GP18、DAT设置为GP19。该代码在库文件中设置好了,它的意思是(CLK)下降后,读取数字口(DAT)电压,当DAT电压为高电平时,旋转编码器的值加1;当DAT电压为低电平时,转编码器的值减1。
然后循环程序中设置按钮管脚(GP20)为低电平时,打印出来。
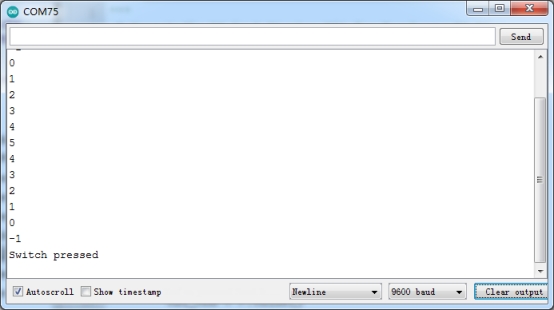
测试结果
上传测试代码成功,利用USB线上电后,打开串口监视器,设置波特率为9600。顺时针旋转编码器,显示数据减小;逆时针旋转编码器,显示数据增加;按下编码器中间按键,显示“Switch pressed”,如下图。