Keyes brick L298P 电机驱动扩展板

1、概述
驱动电机的方法有很多,利用的L29P芯片驱动电机是非常常用的一种方案。 L298P是ST意法半导体公司出品的优秀大功率电机专用驱动芯片,可直接驱动直流电机、二相、四相步进电机,驱动电流达2A,电机输出端采用8只高速肖特基二极管作为保护。我们根据L298P的电路设计了一款扩展板,叠层的设计可直接插接到UNO R3板上使用,降低了用户使用和驱动电机的技术难度。
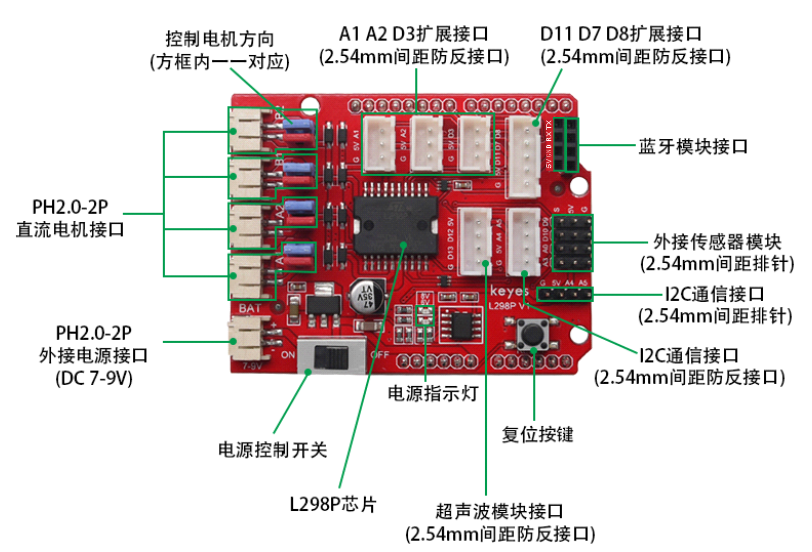
当我们将驱动扩展板堆叠在UNO R3板后,BAT上电后,将拨码开关拨至ON端,外接电源同时给驱动扩展板和UNO R3板供电。驱动扩展板上电机和电源接口为PH2.0-2P防反接口,防止你电源接反导致电路损坏和电机方向乱接,增加测试难度。
同时,驱动扩展板上自带一个间距为2.54mm的排母接口,也是串口通讯接口,兼容市面上常用的蓝牙模块线序,如HC-06模块、HM-10模块。为方便外接其他传感器/模块,驱动板上还自带3个XH-2.54mm 3P防反接口,2个XH-2.54mm 4P防反接口,1个XH-2.54mm 5P防反接口。扩展板还利用间距为2.54mm的排针扩展了2个数字口接口,2个模拟口接口和1个I2C通讯接口。扩展板上还自带一个复位按键,方便你随时进行复位处理。
扩展板可以连接4个直流电机,默认跳线帽连接方式时,A1和A2,B1和B2接口电机并联,运动规律相同。8个跳线帽可用于控制4个电机接口的转动方向,例如当A1电机接口前方2个跳线帽由横向连接改为纵向连接时,A1电机的转动方向就和原来的转动方向相反。
2、 规格参数
2.1、DC输入电压:DC7V~9V
2.2、 逻辑工作电流:最大36mA
2.3、电机驱动电流:最大2A
2.4、最大功耗:25W(温度=75℃)
2.5、工作温度:0 ~ 50℃
2.6、尺寸大小:69x53x26mm
2.7、重量:25.5克
3、GPIO示意图
6V LED指示灯:当外接电源电压低于6.2V时,LED熄灭;高于6.2V时,LED亮起。
8V LED指示灯:当外接电源低于8V时,LED熄灭;高于8V时,LED亮起。
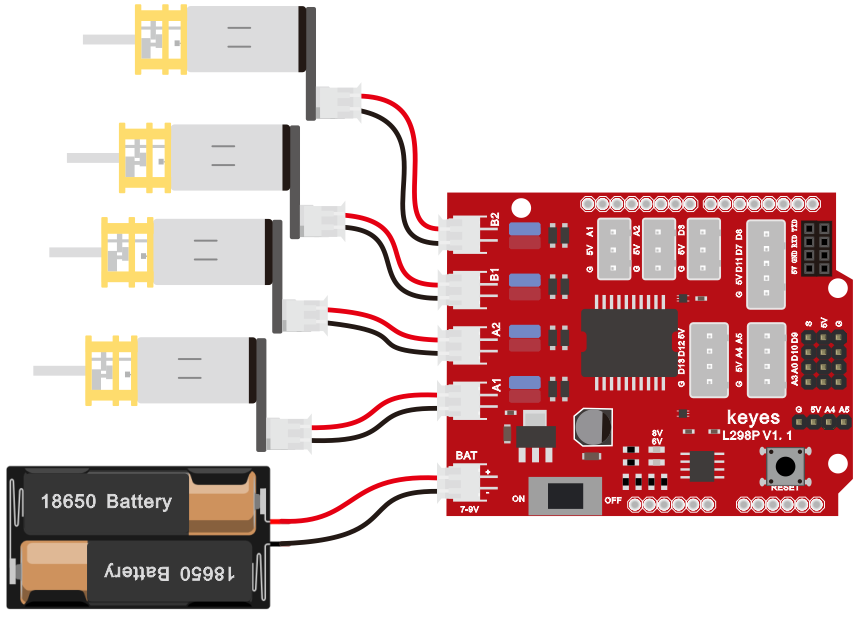
4、连接图
5、示例代码
//电机控制脚
#define EN_L 5 //L298N使能 左电机使能
#define EN_R 6 //L298N使能 右电机使能
#define Motor_Right 2 //L298N IN2 右电机控制正反转
#define Motor_Left 4 //L298N IN3 左电机控制正反转
void setup()
{
pinMode(Motor_Right,OUTPUT);
pinMode(Motor_Left,OUTPUT);
pinMode(EN_L,OUTPUT);
pinMode(EN_R,OUTPUT);
}
//小车前进
void advance()
{
analogWrite(EN_L,200);
analogWrite(EN_R,200);
digitalWrite(Motor_Right,HIGH);
digitalWrite(Motor_Left,HIGH);
}
//小车后退
void back()
{
analogWrite(EN_L,200);
analogWrite(EN_R,200);
digitalWrite(Motor_Right,LOW);
digitalWrite(Motor_Left,LOW);
}
//小车左旋转
void left()
{
analogWrite(EN_L,200);
analogWrite(EN_R,200);
digitalWrite(Motor_Right,HIGH);
digitalWrite(Motor_Left,LOW);
}
//小车右旋转
void right()
{
analogWrite(EN_L,200);
analogWrite(EN_R,200);
digitalWrite(Motor_Right,LOW);
digitalWrite(Motor_Left,HIGH);
}
//小车停止
void stopp()
{
analogWrite(EN_L,0);
analogWrite(EN_R,0);
}
void loop()
{
advance();
delay(1000);
stopp();
delay(200);
back();
delay(1000);
stopp();
delay(200);
left();
delay(1000);
stopp();
delay(200);
right();
delay(1000);
stopp();
delay(200);
}
6、实验结果
在UNO R3控制上传好测试代码后,将扩展板堆叠在UNO R3控制板,按照接线图接线,上电后,两个电机模拟小车运动转动,模拟小车前进1秒,停止0.2秒;后退1秒,停止0.2秒;左旋转1秒,停止0.2秒;右旋转1秒,停止0.2秒;循环交替。
注意:如果实验失败,请先按下面顺序检查
1、先按接线图,检查线材连接是否正确
2、检查程序是否正确烧录致UNO板中
3、程序烧录报错时,请检查选择开发板是否正确
4、检查DC输入电压是否正确,或输入功率满足。电机功率较大,如果输入电源功率不足,则电机转动异常,或UNO板工作异常。